
Automatic Detection of Surface Damage on Forest Roads Using Mobile LiDAR and GIS Processing Tools
doi: https://doi.org/10.5552/crojfe.2026.3636
volume: issue, issue:
pp: 14
- Author(s):
-
- Hruza Petr
- Mikita Tomáš
- Krausková Dominika
- Article category:
- Original scientific paper
- Keywords:
- forest road, mobile LiDAR, GIS, carriageway, wearing course, surface damage, automatic process, detection
Abstract
HTML
In this study, a method of automatically detecting carriageway edges and damaged areas on the surface of forest road wearing courses was tested based on high-density LiDAR data acquired using a handheld mobile laser scanning device. The results were compared with those of current tacheometric methods. Whereas most previous studies have focused on detecting road segments or objects and road centrelines using object-oriented classifications or support vector machine (SVM) algorithms, our research was directed to detect forest carriageway edges and road surface deterioration. Forest roads are designed with a 20-year lifespan before structural failures affect up to 25% of the surface area. We developed an automatic method for detecting damaged areas in the wearing course using GIS tools in ArcGIS Pro. According to the carriageway edges, an overestimation was found between the areas detected automatically and those surveyed tacheometrically, with the automatically detected area being 28% larger. However, it was also found that most of the damage detected was within the tacheometrically surveyed carriageway edges (89%). Agreement between the damage boundary overlaps was relatively low; at 57%, the total damage area detected automatically was 19% larger than that surveyed tacheometrically. The results show that the new automatic process can provide more precise, objective data, as tacheometrical methods can be influenced by the individual approach of a surveyor. Simple and quick detection of damaged areas allows assessing the condition of forest road surfaces and determining repair priorities.
Automatic Detection of Surface Damage on Forest Roads Using Mobile LiDAR and GIS Processing Tools
Petr Hrůza, Tomáš Mikita, Dominika Krausková
https://doi.org/10.5552/crojfe.2026.3636
Abstract
In this study, a method of automatically detecting carriageway edges and damaged areas on the surface of forest road wearing courses was tested based on high-density LiDAR data acquired using a handheld mobile laser scanning device. The results were compared with those of current tacheometric methods. Whereas most previous studies have focused on detecting road segments or objects and road centrelines using object-oriented classifications or support vector machine (SVM) algorithms, our research was directed to detect forest carriageway edges and road surface deterioration. Forest roads are designed with a 20-year lifespan before structural failures affect up to 25% of the surface area. We developed an automatic method for detecting damaged areas in the wearing course using GIS tools in ArcGIS Pro. According to the carriageway edges, an overestimation was found between the areas detected automatically and those surveyed tacheometrically, with the automatically detected area being 28% larger. However, it was also found that most of the damage detected was within the tacheometrically surveyed carriageway edges (89%). Agreement between the damage boundary overlaps was relatively low; at 57%, the total damage area detected automatically was 19% larger than that surveyed tacheometrically. The results show that the new automatic process can provide more precise, objective data, as tacheometrical methods can be influenced by the individual approach of a surveyor. Simple and quick detection of damaged areas allows assessing the condition of forest road surfaces and determining repair priorities.
Keywords: forest road, mobile LiDAR, GIS, carriageway, wearing course, surface damage, automatic process, detection
1. Introduction
Forest ecosystems constitute 31% of the Earth's surface (FAO 2011), and those managed are accessed via a forest road network, primarily for forest management. Due to the challenging terrain of forests, its often low bearing capacity, and low traffic intensity, forest roads present specific construction issues, which make construction and repairs expensive relative to the level of road usage, especially those constructed with a sealed wearing course. In the world generally, Sakai (2017), Faria et al. (2021), and Nininahazwe et al. (2024) demonstrate that the process of planning and designing forest roads is far from perfect. In the Czech Republic, there is no legal difference between forest and other roads; the traffic rules are the same as well as the vehicles allowed, according to the Roads Act No. 13/1997 Coll. Therefore, the main forest roads are constructed with similar technologies, and the costs are often comparable with other roads. For forestry, monitoring the state of roads is essential for smoothly accessing harvesting locations, timber transport, and overall forest management. The most common type of wearing course damage is rutting, which leads to erosion and surface damage as water accumulates; when it freezes, it may cause a gradual disintegration of the road (Ciobanu et al. 2012, Akgul et al. 2017), creating potholes or tearing off the abrasive layer. Maintenance is vital, and monitoring the condition of the road surface allows for early detection and saves money on repairs (Dickie and Speirs 2021, Fjeld et al. 2021). In recent years, there has been a substantial increase in the development of sensor technologies that may provide spatially accurate information on the current state of forest roads, which is fundamental for important forest management and recreation activities.
Tacheometric surveying using a total station and Global Navigation Satellite System (GNSS) is the most commonly employed method to assess road damage. The operator's subjectivity may influence this method. As Murray (1998) notes, together with the design of forest roads in the field and the creation of project documentation, all these processes are highly time-consuming. Much work has been done (Akgul et al. 2017, Hruza et al. 2018, Leonardi et al. 2018) to find faster methods of assessing forest road damage. With the rapid development of digital technologies, there is currently an effort to automate and objectify the entire repair design process to enable more efficient financial decision-making on forest road maintenance. Laser scanning emerges as a promising technology and avoids the need for numerous ground control points (GCPs). While image processing methods yield good results, laser scanning offers greater accuracy and efficiency (Yurtseven et al. 2019, Bhatt et al. 2022).
Several studies have demonstrated the potential of airborne laser scanning (ALS) (Cloude et al. 2007, Hui et al. 2016, Even et al. 2021). The disadvantage of ALS is the very low point density (typically about 10–20 points/m2), characteristic of plane-based laser scanning conducted from higher altitudes to cover large areas, such as state-wide surveys. In such cases, the increased flight altitude is necessary for broader coverage but reduces point density. Conversely, unmanned aerial vehicle (UAV)-based laser scanning at lower altitudes can achieve significantly higher point densities (about hundreds per m2). Higher point densities are always dependent on the flight altitude, and conversely, the size of the scanned area decreases with flight altitude. Therefore, when scanning with UAVs, the point density will always be significantly higher than plane-based ALS. ALS may encounter additional limitations in forest roads as some laser pulses can be intercepted by the tree canopy, further reducing the density of ground points on roads obscured by dense vegetation (Prendes et al. 2019). Terrestrial laser scanning (TLS) is also commonly used for detailed road carriageway mapping. This provides a very high density of points; however, it is time-consuming and unsuitable for long forest roads. (Guo et al. 2015, Hrůza et al. 2016, Bhatt et al. 2022).
The possibility of using laser scanning of the surface to determine its shape and create 3D models of roads, including their technical equipment, is being increasingly explored and is becoming more common in road information inventory, as Guan et al. (2016) demonstrated in their review. LiDAR technology seems better suited to urban environments than forests due to the greater distance of disturbing objects from the scanned surface. However, certain limitations for the automated process still apply here. In their research, Landa and Prochazka (2014), Yang et al. (2013), and Gülci and Şireli (2019) point out that LiDAR technology could be helpful for tasks such as detecting road signs, marking roads, and assessing surface deformation in both urban and forest environments. However, they emphasize that these processes still rely on some human involvement for accuracy, as full automation remains challenging. Compared to forest environments, in urban areas, it is easier to detect road edges, which are essential for determining the width of a road. Similarly, Guan et al. (2016) note that curbs, the boundaries of roads in cities, are a critical feature for road extraction. Several authors have verified the method of identifying road edges to determine their width and location relative to surroundings in urban environments, such as Yang et al. (2013). Guo et al. (2015) combined road width elevation-point cloud data to filter out non-road surface points and noted that, although mobile LiDAR technology had been available for a decade, its practical application was limited due to the labor needed and the complexity of data processing. Vallet and Papelard (2015) demonstrated that mobile laser scanning (MLS) provides greater accuracy and point density for digital terrain models (DTMs) than aerial methods. They suggest MLS can be applied to tasks like image-based localization, road quality assessment, and water flow simulations. Although their findings are not specific to any environment, they note that MLS advances could impact the use of technology on forest roads.
Several authors have explored methods to improve forest road maintenance and repair. Abdi et al. (2012) initiated concepts for better planning, while Starke et al. (2021) and Toscani et al. (2020) highlighted the growing importance of monitoring forest road conditions, which impacts maintenance needs (Akay et al. 2020, Dodson 2021). MLS is used to assess specific forest road conditions. Still, a broader forest road network design typically relies on GIS (Geographic Information System) tools (Aricak et al. 2015, Yoshida et al. 2019, Acosta et al. 2023, Watanabe et al. 2023). Potočnik et al. (2005) demonstrated the role of forest road network maintenance, which Pellegrini et al. (2013) and Yang et al. (2014) developed into Decision Support Systems using GIS and Analytic Hierarchy Process (AHP) techniques.
Najafi et al. (2008) pointed out that constructing forest roads and harvesting timber are the most expensive forestry activities, leading engineers to seek cost reductions. Hruza et al. (2016) proposed unmanned aerial systems (UAS) as a more efficient alternative to traditional field surveys despite challenges such as legislative restrictions and collision risks. UAS technology is more suitable for post-harvesting terrain modeling and small-scale road repair (Pierzchala et al. 2014, Pszenny 2020, Turk et al. 2022, Hasegawa et al. 2023). Tomljanović et al. (2022) provided an overview of UAS applications in forestry, while Talbot et al. (2017) and Tomaštík et al. (2017) stated that many remote sensing applications remain experimental, with issues that need resolution before they can be widely used. Automation should help to determine the actual condition of the road, i.e., to detect and summarize any damage to the wearing course, which is most stressed by vehicle traffic. This aims to provide outputs that can be used for more efficient decision-making regarding allocating financial resources to keep the forest road network operational (Hruza et al. 2016).
All of this leads to consideration of new handheld LiDAR technology, generically referred to as MLS, and more specifically to a handheld personal laser scanning (PLShh) (Dandois and Ellis 2010, Kukko et al. 2017, Balenović et al. 2021, Gollob et al. 2021, Mokros et al. 2021, Ozmen et al. 2022). Kukko et al. (2012) demonstrate that MLS is an evolving technology with significant applications in urban engineering, transportation, and natural sciences, including forestry. Despite its potential, MLS, as noted by Guan et al. (2016) and Hruza et al. (2018), cannot fully replace conventional methods and falls short of the accuracy offered by TLS devices. However, it provides continuous scanning capabilities and, notably, operates independently of a GNSS signal, which is especially valuable for road and forest management, as highlighted by Lei et al. (2021) and Mikita et al. (2022). Regarding the accuracy and the most suitable use of mobile LiDAR technology to collect information about the inventory of objects on roads, the best results are achieved in the automatic detection of pole-like objects, as stated by Yan et al. (2017). Forkuo and Borz (2023) emphasize the potential of low-cost mobile LiDAR for efficient data collection in forestry. However, more research is needed to improve accuracy, as Nita and Borz (2023) suggested. The use of smartphones in transportation has a future (Wang et al. 2020), but in the case of forest roads, smartphones with LiDAR sensors can be used for local scanning (Luetzenburg et al. 2021), with measurement errors increasing with the length of the longitudinal profile (Mikita et al. 2022).
To address the problem with complex road sections, methods based on deep learning technology are now widely researched and implemented in automatic road extraction (Saito et al. 2013, Liu et al. 2019, Even and Ngo 2021, Mohammad et al. 2022, Starke and Geiger 2022). Most recent studies using Convolutional Neural Networks (CNNs) or Autoencoders and Sparse Coding (Maeda et al. 2018, Heidari et al. 2022) deploy object-based systems to detect the deterioration of forest roads automatically.
This study aimed to verify the accuracy of handheld mobile laser scanning to assess the area of damage on the surface of the forest road wearing course compared to tacheometric measurements of surface damage, including ruts, potholes, and detached surface layers, along with the detection of forest road carriageway edges. Additionally, the study aimed to determine whether handheld mobile laser scanning can replace the current tacheometric method of detecting surface damage area with an accuracy suitable for determining forest road longevity and renewal (design lifespan of 20 years and 25% of surface structural failures).
All this should help a forest owner determine the urgency and priority of forest road repair and provide the basis for financial planning regarding the state of the forest road network.
2. Materials and Methods
Forest roads with a sealed wearing course were chosen for the study, as most forest roads in the Czech Republic used for year-round timber transport were, until recently, constructed using a sealed technology called penetration macadam. Many of these roads have now exceeded their lifespan and require reconstruction. All forest roads had a roof-shaped carriageway with a 3% cross slope on both sides and a width of 3 meters. The typical damage to the penetration macadam is shown in Fig. 7.
Laser scanning data were collected on four selected sections of forest roads in Moravia, the Czech Republic (Fig. 1). The chosen sections were one from each of the two roads in the vicinity of Šternberk, marked ST1 and ST2, and two sections from one road near Žďárské vrchy, marked ZV1 and ZV2. The sections were selected for the road surface wearing course damage and their need for repair.
Fig. 1 Localities of test road sections within the Czech Republic
Section ST1 was 190 m long, predominantly flat, with a slight descent followed by a slight ascent with an average longitudinal gradient of 2.0%. Section ST2 was 170 m long; the whole section increased steadily with an average longitudinal gradient of 6.8%. Section ZV1 was 180 m long, predominantly flat, with a slight longitudinal gradient of 3.6%. Section ZV2 was 380 m long, predominantly flat, with a slight descent and subsequent ascent with an average longitudinal gradient of 1.9%.
All sections were surveyed using the Trimble S5 total station in the local coordinate system to evaluate the precision of detecting forest road carriageway edges and damaged areas. Emphasis was placed on capturing road edges and accurately recording surface damage positions during surveying. The tacheometric survey was based on 3–4 stabilized reference points from wooden stakes on each section of the road. The selected road sections were scanned with the GeoSLAM ZEB Horizon laser scanner (Faro Ltd.) using the same local coordinate system. The scanning was carried out by walking along the sections of the forest road. The measurement always started and ended at the same point. The section was measured back and forth along the forest road (Fig. 2). Stabilized reference points were captured during scanning to be visible in the point cloud for subsequent georeferencing. The RGB camera was not used to color the points during the data collection. The resulting point clouds contained only information about the intensity of the reflection. The data from the scanner were processed into a point cloud in the GeoSLAM Connect software, where the point clouds were geo-referenced based on tacheometrically measured reference points. Subsequently, ground points were classified from the created point clouds using Cloud Compare software with the Cloth Simulation Filter (CSF) filter tool, and then outliers and noise were removed using the Statistical Outlier Removal (SOR) filter. A CSF setting with a Cloth resolution of 0.1, Max iterations of 1000, and a Classification threshold of 0.1 was used for accurate ground point classification. The SOR filtering used 6 points for mean distance estimation and a standard deviation multiplier threshold value of 1.0.
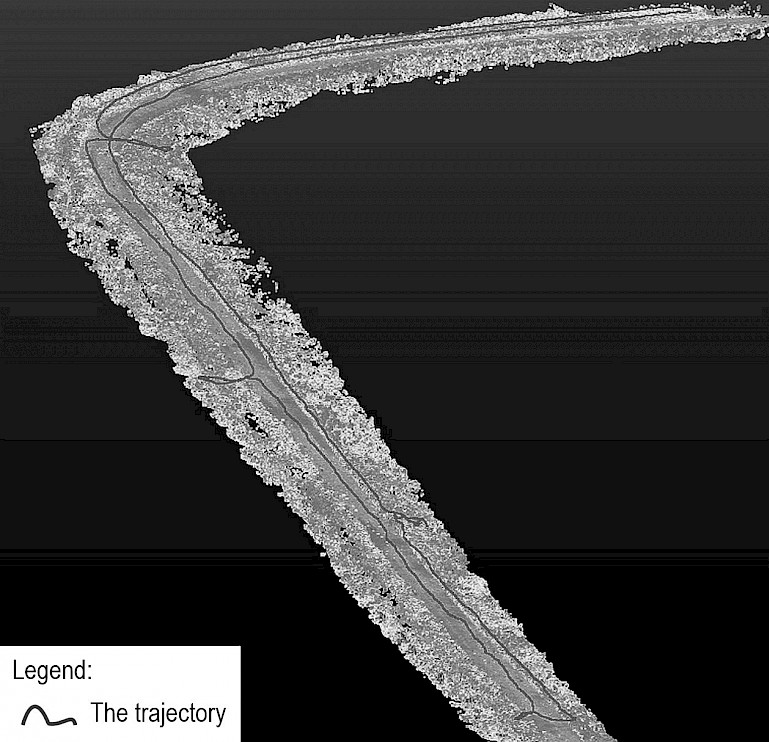
Fig. 2 Example of a scanned point cloud after classification and trajectory filtering (branches show the locations where the reference points were placed)
2.1 Data Processing
2.1.1 Geomorphon Landforms Tool
The surface of the forest road wearing course was made of penetration macadam and had a different structure from the verges and surrounding vegetation. However, the edges were not visible when using a point cloud with only intensity information and without an RGB camera. The road surface is predominantly flat, and its shape is distinct from the roadsides and surroundings. Automatic detection of the road surface from the point cloud based on the intensity of the reflection was not possible. The road surface detection is, therefore, based on the classification of the relief shapes. The methodology for detecting the road surface used an algorithm for classifying landforms in the ArcGIS Pro version 3.3.1, called Geomorphon Landforms. This tool works with a digital elevation model (or surface model) and uses geomorphological principles to identify and classify landforms based on their shape and structure.
To characterize the terrain, the Geomorphon landforms tool uses the line-of-sight principle, which starts by extracting elevation profiles for each central cell in the digital elevation model (DEM) along the eight main compass directions (N, NE, E, SE, S, SW, W, NW) up to a specified lookup distance L. For each point on these profiles, we calculated the elevation angle Ɵ, which is the angle between the horizontal plane and the line connecting the central cell to the profile point. The elevation angle was negative if the point was lower than the central cell. Next, the zenith and nadir angles were determined. For each direction D, the maximum elevation angle DβL was found from the set of elevation angles DSL and the zenith angle DϕL=90∘−DβL was calculated. Similarly, the minimum elevation angle DδL was found from DSL and the nadir angle DψL=90∘−DδL was calculated. Finally, the tool was used to repeat these calculations for all eight directions to obtain a comprehensive characterization of the terrain relief and openness around each central cell in the DEM.
The tool allows for the manual definition of several parameters that influence the resulting classification of landforms. Specifically, these parameters are:
flat terrain angle threshold: This parameter determines the maximum slope angle considered flat terrain. It helps to distinguish between flat and sloped areas of the terrain
search distance: This is the maximum distance the tool searches for elevation profiles from the central cell. It affects the extent of the terrain analyzed for calculating the zenith and nadir angles
skip distance: This parameter specifies the intervals at which elevation profiles are processed. For example, the tool analyzes every nth point on the profile if the skip distance is set to a certain number of meters or cells. This can speed up the calculation but may reduce accuracy (Jasiewicz and Stepinski 2013).
The Geomorphon landforms tools result in two rasters, the classified landforms and the geomorphons raster layer, which represents the unique identifier of the geomorphic pattern. The landforms raster classifies the relief based on preset parameters, and the geomorphons raster contains relative values that can be further classified according to the user's requirements.
2.1.2 Processing Workflow
The detection procedure is based on the simultaneous detection of the forest road carriageway edges and the areas of surface damage. In the first step, we interpolated a digital raster model of the road surface and its surroundings from the point cloud. For this study, a DTM resolution of 0.05 m was chosen to allow faster calculation, but it would also have been possible to select a higher resolution. The next step was to calculate relief shapes using the Geomorphon Landforms tool.
The Geomorphon Landforms tool was first applied to identify the road body and then to detect damage to the road surface. For road and damage detection, it was necessary to test the appropriate tool settings. We adjusted the parameters of the Geomorphon Landforms tool (Table 1) based on the specific requirements of the analysis and the terrain characteristics, allowing the land-form classification to be tailored to the particular conditions and goals of the study.
Table 1 Parameters of Geomorphon Landforms tool for detecting forest road carriageway edges and surface wearing course damage
|
Carriageway edges |
Surface wearing course damage |
|
|
Flat terrain angle threshold, deg |
15 |
1 |
|
Search distance, m |
0.40 |
1.00 |
|
Skip distance, m |
0.30 |
0.95 |
The resulting geomorphon rasters were reclassified in the next step based on threshold values. A value of 3800 was chosen for the road surface, where pixels with a higher value represent the road surface with a flat shape. Conversely, the lower values represent the surrounding relief (or vegetation).
A threshold value of 1500 was chosen for surface damage, where values greater than 1500 represent surface damage and smaller values represent the surroundings. These values were obtained based on zonal statistics. Threshold values were obtained by analyzing the prevailing Geomorphon raster values within the tacheometrically surveyed road damage.
The reclassified raster of forest road carriageway edges was then smoothed with the Boundary Clean tool, and the individual pixels were grouped using the Region Group tool. In the case of forest road detection (both carriageway edges and surface damage), only pixels belonging to the road surface were selected, and at the same time, groups of pixels with an area of less than 25 m2 were eliminated; the result was converted into vector form, and the resulting path shape was smoothed by the Smooth Polygon tool. In the case of surface damage, only the relevant pixels were selected and vectorized, and the carriageway edges of the forest road were trimmed from the resulting layer.
For faster calculations in ArcGIS Pro, a processing model (Fig. 3) was created in the Model Builder environment, and the procedure was repeated for all selected forest road sections. The processing process from point cloud to detected damage depends on the user's experience, the length of the section (data volume), and computing power, but it should not take more than 2 hours for a single section if the procedure developed is used.
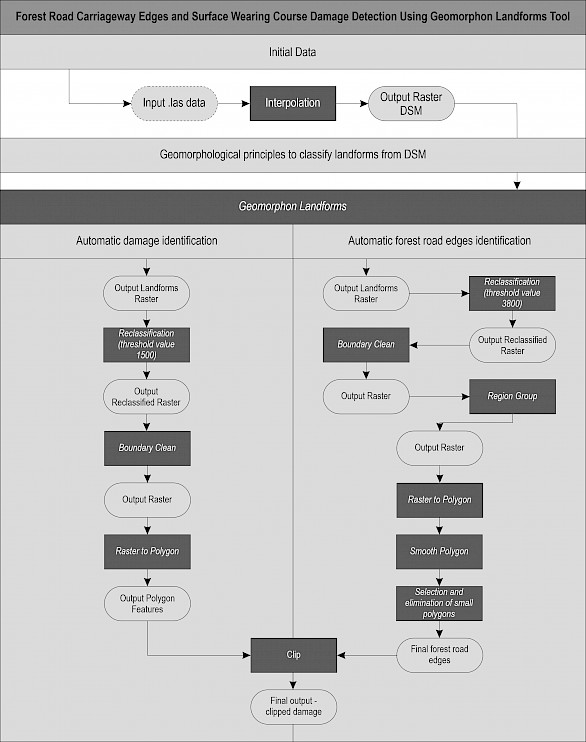
Fig. 3 Workflow diagram for the detection of forest road carriageway edges and surface wearing course damage
3. Results
The automatic method, tested to detect forest road carriageway edges and surface wearing course damage, achieved different accuracy from tacheometric measurement on forest road sections. Automatic detection regularly gave a wider reading for carriageway edges than tacheometric measurement on both sides, leading to overestimating the road carriageway area; tacheometric measurements were always automatically inside those detected (Fig. 4).
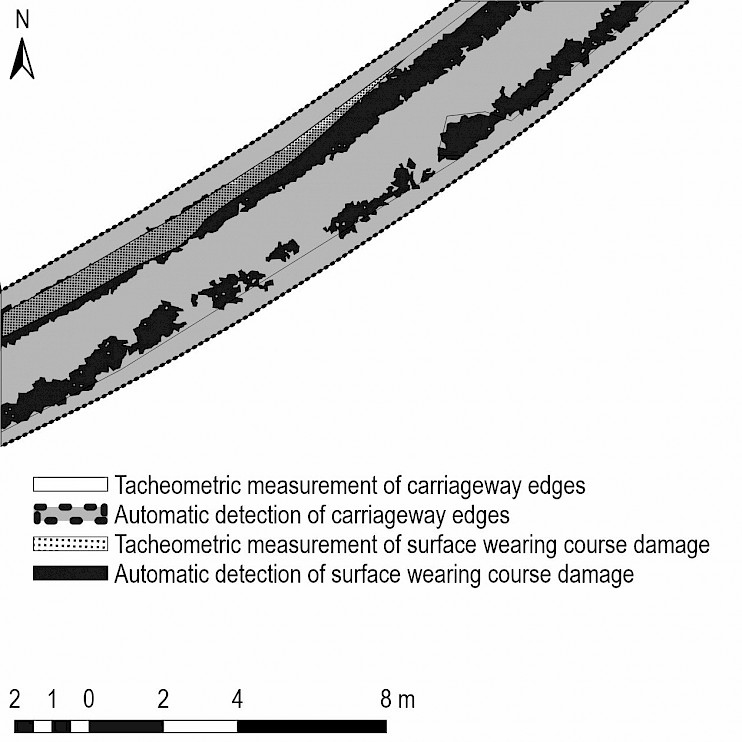
Fig. 4 Overestimation of automatic detection relative to tacheometric measurement. Results of automatic detection of forest road carriageway area (inside dark dashed lines), automatic surface wearing course damage detection (dark grey area), and comparison with tacheometric measurement of forest road carriageway edges (grey inlines) and tacheometric surface wearing course damage (dotted pattern)
The most significant width deviations (up to nearly four meters) occurred at the junctions of skidding tracks, where a part of the connecting road was detected. However, in most cases, the detection of road width did not significantly affect damage detection, and the incorrectly determined road shape could be manually adjusted. Table 2 shows the differences in cross-profile width. Cross profiles for calculation were taken every 10 m on each section.
Table 2 Differences in cross-profile width calculated as tacheometrically measured width minus automatically detected width
|
Section |
ST1, m |
ST2, m |
ZV1, m |
ZV2, m |
|
Mean |
–0.88 |
–0.49 |
–1.27 |
–1.59 |
|
Min. |
–1.50 |
–2.59 |
–2.60 |
–3.81 |
|
Max. |
–0.15 |
0.30 |
0.14 |
–0.68 |
|
Std. dev. |
0.32 |
0.69 |
0.85 |
0.70 |
|
RMSE |
0.94 |
0.85 |
1.53 |
1.74 |
In Sections ST1, ST2, and ZV1, the area of forest road carriageway was overestimated by 10.2% to 18.5%. In Section ZV2, much higher overestimates of carriageway area were obtained (42.6%), caused by the automatic method used for detecting reinforcements, especially at intersections with other forest roads or reinforced skidding access to forest stands (the junctions of skidding tracks) (Table 3).
Table 3 Forest road carriageway edge detection
|
Area of forest road carriageway edges |
ST1 |
ST2 |
ZV1 |
ZV2 |
Mean |
||||
|
m2 |
% |
m2 |
% |
m2 |
% |
m2 |
% |
% |
|
|
Tacheometric measurement |
578 |
100.0 |
579 |
100.0 |
601 |
100.0 |
1289 |
100.0 |
100.0 |
|
Automatic detection |
685 |
118.5 |
638 |
110.2 |
695 |
115.6 |
1839 |
142.6 |
127.9 |
Due to the overestimation of the forest road carriageway edges by automatic detection, surface wearing course damage was partially detected outside the tacheometrically surveyed edges of the road. However, on average, 89% of the detected damage was within the tacheometrically measured carriageway edges (from 78% to 91%) (Table 4 and Fig.5).
Table 4 Detection of wearing course damage inside and outside tacheometrically measured carriageway edges
|
Area of surface damage detection |
ST1 |
ST2 |
ZV1 |
ZV2 |
Mean |
||||
|
m2 |
% |
m2 |
% |
m2 |
% |
m2 |
% |
% |
|
|
Inside edges |
98.5 |
91.4 |
153.1 |
90.0 |
85.2 |
78.4 |
370.0 |
91.4 |
89.4 |
|
Outside edges |
9.2 |
8.6 |
17.0 |
10.0 |
23.5 |
21.7 |
34.1 |
8.4 |
10.6 |
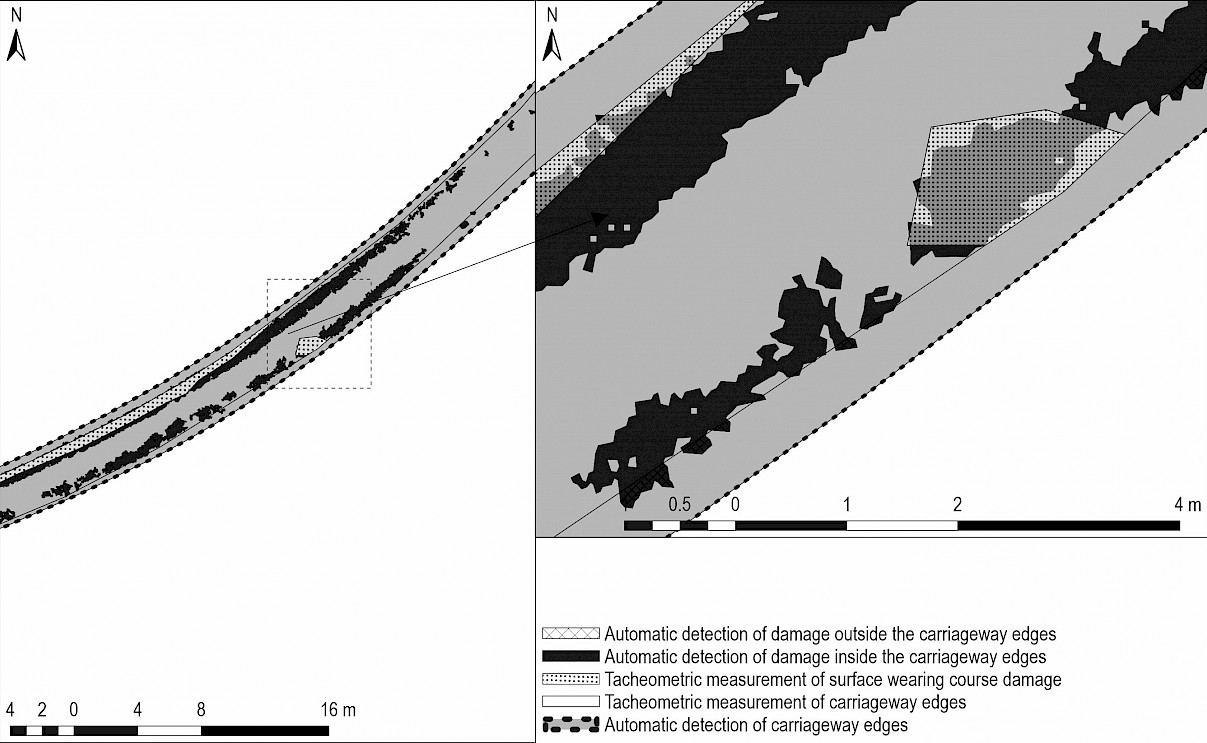
Fig. 5 Area of automatic wearing course damage detected inside and outside tacheometrically measured carriageway edges (dark grey area and hashed back lines)
To evaluate the success of the automatic detection method, we compared the extent of the damaged area detected as a percentage of that measured by tacheometric methods. The damage was significantly overestimated in all sections except ZV2. On average, the overestimation was 19% (Table 4).
The overlap between the total area damage detected by tacheometric measurement and automatic detection was less than 57%, with individual sections of the road varying between 52% and 64% (Table 5 and Fig. 6). This difference shows the effect of the subjectivity of a surveyor taking tacheometrical measurements in the field in contrast with the more precise damage detection of laser scanning. (See Section ST1 in Fig. 7 and compare with laser scanning results and tacheometrical measurement for this part of the road). The discrepancy occurs because the surveyor is often more focused on significant (main) damage, such as deep potholes and ruts, than on a torn-off abrasive layer (see Fig. 6).
Table 5 Surface wearing course damage detection
|
Surface wearing course damage |
ST1 |
ST2 |
ZV1 |
ZV2 |
Mean |
||||
|
m2 |
% |
m2 |
% |
m2 |
% |
m2 |
% |
% |
|
|
Tacheometric measurement |
65.9 |
100.0 |
121.5 |
100.0 |
108.5 |
100.0 |
559.3 |
100.0 |
100.0 |
|
Automatic detection |
107.8 |
163.5 |
170.1 |
140.0 |
108.7 |
100.2 |
404.7 |
72.4 |
119.0 |
|
Overlapping area |
37.9 |
57.5 |
63.9 |
52.6 |
61.8 |
57.0 |
323.1 |
57.8 |
56.9 |
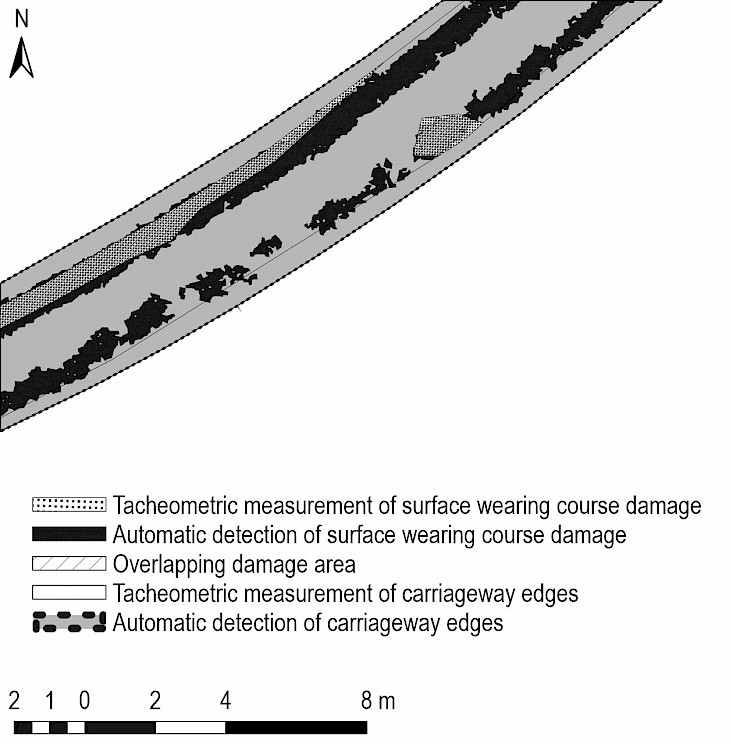
Fig. 6 Comparison of overlap and extension between tacheometric measurement and automatic detection of surface wearing course damage
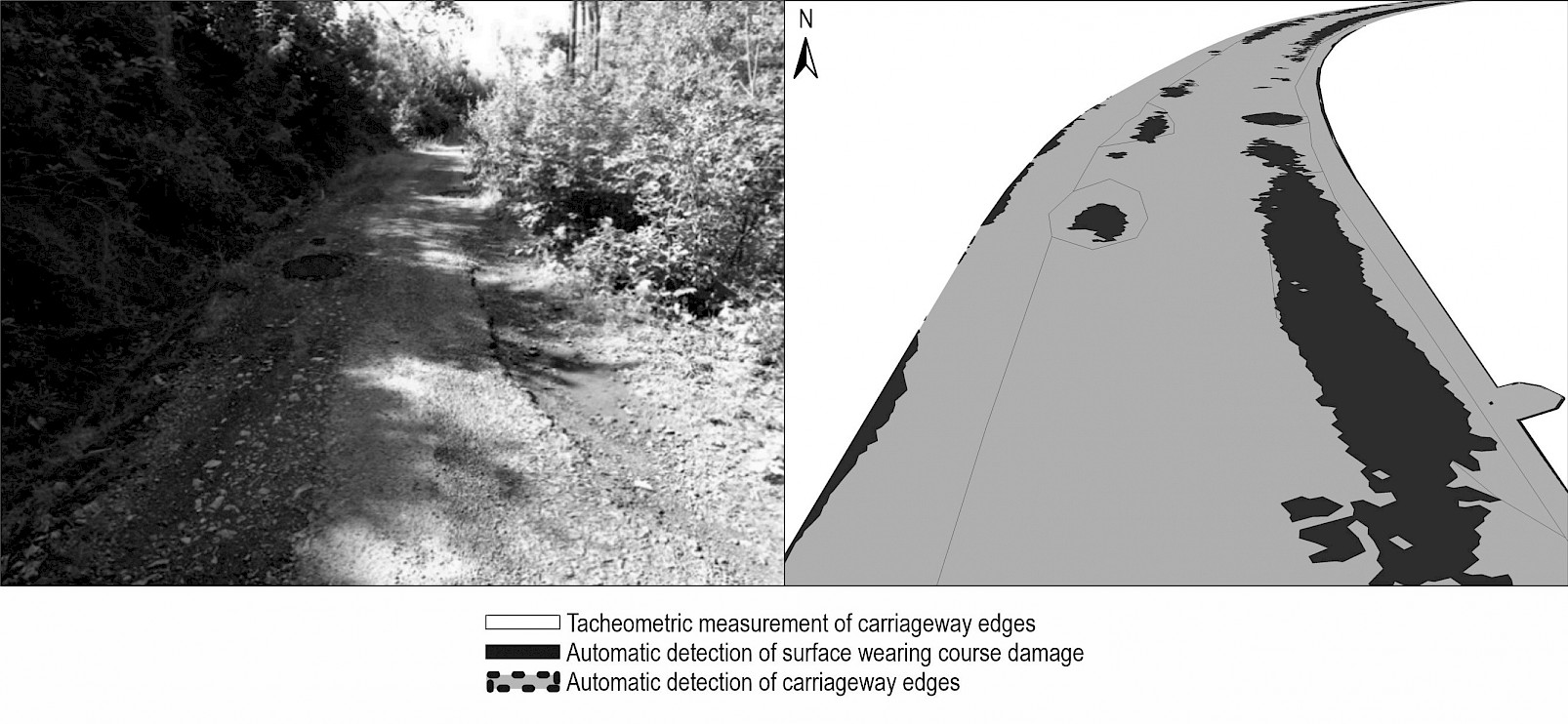
Fig. 7 A typical example of surface wearing course damage on ST1 (field, laser scanning) compared to automatic detection of surface wearing course damage
4. Discussion
Over the past decades, several methods have been developed for automatic road extraction (Clode et al. 2004, Ferraz et al. 2016, Philippe and Phuc 2021), with a focus on DTM analysis using image processing tools. These may produce accurate results in urban areas with regular road characteristics and good contrast. Still, they are less accurate when applied to forest roads because of their irregularities, terrain, and overall characteristics. Among the principal challenges of the developed methodology is the automatic identification of the road itself, which often leads to significant overestimation, particularly at road intersections or reinforced skidding access to forest stands. In these areas, the forest road formation was substantially expanded, and the most significant overestimation was observed in the automatic detection of the surface wearing course area (Table 3, Section ZV2, 42.6%) compared to its tacheometric survey. These issues can be addressed through manual intervention. For the analyses conducted in this study, digital surface models were employed, as the edges of forest roads had not been delineated. The herbaceous vegetation that grows along the road shoulders presented a substantial barrier that complicated the automatic detection of terrain shapes, thus impeding the differentiation between the flat road surface and its surroundings. Additionally, methods for automatic classification of ground points were tested; however, due to the GeoSLAM scanner lack of multiple return capability, the laser pulses did not penetrate the vegetation to reach the underlying terrain.
Although at first glance, the method of automatic surface wearing course damage detection did not achieve a very high accuracy of location match (with only 57% overlap), the overall surface damage area results reached an approximate agreement. Several factors can influence the results. One of these is the accuracy of the pothole and rut survey. The location of individual points during a tacheometric survey is highly subjective. It depends on the surveyor's judgment of when to consider the damage significant and whether it should be captured. Additionally, tacheometric measurement generalizes the shape of potholes and ruts. It can be concluded that the low agreement shown by the overlap in the evaluation of the two methods (Table 5) was due to this generalization of the shape of potholes and ruts, a lack of precise measurement of the torn-off abrasive layer, and the surveyor's effect of increasing the actual area of damaged potholes or ruts. The tacheometric measurement method suffers from accuracy issues due to the distance between the points where the survey rod is positioned and recorded on the road surface. The surveyor's approach overestimates the extent of individual areas of damage (as seen in Fig. 5) and neglects to measure the torn-off abrasive layer, as seen in Fig. 6. This is why, on Sections ST1, ST2, and ZV1, automatic detection is so much higher than on ZV2, as shown in Table 4. The overall area of automatic damage detection was approximately 19% higher than that measured by a surveyor using tacheometric methods. Since laser scanning can precisely capture the shape of surface structural failures, such as the tearing off of the abrasive layer, this method, with a suitable device, can assess forest road longevity and propose renewal strategies. This means determining the priority of forest road repairs quickly and objectively.
Personal handheld mobile laser scanners, such as the GeoSLAM ZEB Horizon (Faro Ltd.), will become standard for detecting forest road wearing course damage. Compared to low-cost devices such as the iPhone LiDAR scanning app (Mikita et al. 2022), promising overall results have been achieved with this device. We found that it maintained its measurement stability in longitudinal distance. Due to its relative simplicity of use in a forest environment influenced by the surrounding forest canopy, this device can replace GPS technology (Abdi et al. 2012) or even UAV (Hrůza et al. 2016, Turk et al. 2022) in such an environment. Azizi et al. (2013) used airborne LiDAR data collected by a sensor mounted on a fixed-wing aircraft for forest road detection, and their findings show that this kind of technology helped detect the center line with a positional accuracy of ±1.3 m. Compared to other laser scanning results in urban environments (Yang et al. 2013), the detection accuracy of forest road carriage edges is low because forest roads are constructed without concrete curbs. Urban roads and their surface quality are difficult to compare, even in sealed-wearing courses, so the results achieved by using terrestrial mobile LiDAR to automatically reconstruct road surface features in urban areas (Guo et al. 2015) are incomparable. As mentioned above, our suggested automatic method for detecting forest road carriageway edges must be verified considering the presence of other forest road crossings and skidding access to forest stands. However, even in urban areas, there is a call for a semi-automated process (Yang et al. 2013). This automatic method can also be applied to other data collection techniques, such as terrestrial laser scanning (Akgul et al. 2017) or mobile LiDAR systems (Guan et al. 2016), which offer precise surface measurements. Additionally, integrating an RGB camera could enhance detection accuracy by capturing visual details like texture and color variations that complement LiDAR data (Maeda et al. 2018). In the case of forest roads, it would be possible, for example, to classify the RGB values of a point cloud and thus distinguish the forest path surface not only based on the shape (as in this study) but also based on the color (or reflectivity) of each point. It has already been shown that mobile devices with an integrated LiDAR sensor can measure shorter sections of forest roads (Mikita et al. 2022). Therefore, the proposed approach can also be applied to data acquired with mobile devices. With further development of these devices, the positional and elevation accuracy will gradually increase. However, with the development of LiDAR technology, mobile scanners are becoming significantly cheaper, and the method has the potential to become widely available not only for assessing road surface damage but also for forestry inventory. This dual-use potential helps justify acquisition costs by demonstrating its broader applicability in forest management.
5. Conclusions
Automatically detecting surface wearing course damage on forest roads involves two parallel steps. First, the carriageway edges are identified using a laser-scanned point cloud, which provides a detailed 3D representation of the terrain, including the road and its surroundings. Although algorithms are employed to analyze the point cloud data to detect and delineate the edges of the carriageway, this may still involve filtering out elements (such as crossings with other roads and reinforced skidding access to forest stands) and accurately tracing the road and the carriageway edges. Thus, the process of automatic detection must be controlled. Second, the condition of the road surface is assessed, and the damage area to the surface wearing course is determined. This involves examining damage within carriageway edges to detect potholes, rutting, and other types of wear, such as a torn-off abrasive layer. Techniques such as surface texture analysis, pattern recognition, and deep machine learning may be used to identify and classify the extent of the damage. Still, our automatic damage detection method did not allow this degree of accuracy. In our study, only the area of the damage was considered and not its shape or depth. This will be the focus of a subsequent study, aiming to detect the type of surface damage to the forest road wearing course.
Running these two processes in parallel ensures a comprehensive assessment of the forest road condition. The first automatic process provides the necessary spatial context by defining where the forest road carriageway edges are, with the manually controlled process of its result. In contrast, the second process focuses on evaluating the condition of the road wearing course surface within the defined damage areas that GIS tools can fully automate. Together, these processes allow forest road conditions to be effectively monitored, ensuring they remain safe and passable. They also provide forest managers with more objective forest road care planning decisions.
Acknowledgments
This study was supported by the Department of Landscape Management, Faculty of Forestry and Wood Technology, Mendel University in Brno, and funded by the Internal Grant Agency of the Faculty of Forestry and Wood Technology, Mendel University in Brno, Czech Republic (grant number IGA-LDF-22-IP-030). The authors would like to thank LČR, s.p., for providing access to their forest roads and for assisting in the selection of the study sites. We also thank our colleague, Ing. Petr Pelikán, Ph.D., for his valuable help in the field.
6. References
Abdi, E., Sisakht, S.R., Goushbor, L., Soufi, H., 2012: Accuracy assessment of GPS and surveying technique in forest road mapping. Ann. For. Res. 55(2): 309–317. https://doi.org/10.15287/afr.2012.68
Acosta, F.C., Rengifo S.P., García, M.L., Matricardi, E.A.T., Castillo G.B., 2023: Road Network Planning in Tropical Forests Using GIS. Croat. J. For. Eng. 44(1): 153–169. https://doi:10.5552/crojfe.2023.1742
Akay, A.O., Akgul, M., Demir, M., Acar, H.H., 2020: Analysis of factors associated with the amount of forest road reconstruction activity in Turkey: Autoregressive distributed lag modeling approach. For. Ecol. Manag. 458: 117800. https://doi:10.1016/j.foreco.2019.117800
Akgul, M., Yurtseven, H., Akburak, S., Demir, M., Cigizoglu, H.K., Öztürk, T., Eksi, M., Akay, A.O., 2017: Short term monitoring of forest road pavement degradation using terrestrial laser scanning. Meas. 103: 283–293. https://doi.org/10.1016/j.measurement.2017.02.045
Aricak, B., 2015: Using remote sensing data to predict road fill areas and areas affected by fill erosion with planned forest road construction: a case study in Kastamonu Regional Forest Directorate (Turkey). Environ. Monit. Assess. 187(7): 417. http://doi.org/10.1007/s10661-015-4663-7
Azizi, Z., Najafi, A., Sadeghian, S., 2014: Forest Road Detection Using LiDAR Data. J. For. Res. 25(4): 975–980. https://doi:10.1007/s11676-014-0544-0
Balenović, I., Liang, X.L., Jurjević, L., Hyyppä, J., Seletković, A., Kukko, A., 2021: Hand-Held Personal Laser Scanning–Current Status and Perspectives for Forest Inventory Application. Croat. J. For. Eng. 42(1): 165–183. https://doi:10.5552/crojfe.2021.858
Bhatt, A., Bharadwaj, S., Sharma, V.B., Biswas, R.D.A.S., 2022: An Overview of Road Health Monitoring System for Rigid Pavement By Terrestrial Laser Scanner. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 43: 173-180. https://doi.org/10.5194/isprs-archives-XLIII-B1-2022-173-2022
Ciobanu, V., Alexandru, V., Sǎceanu, S.C., 2012: Degradation forms of forest gravel road roadways under heavy vehicles used in timber transport. Bulletin of the Transilvania University of Brasov, Series II: Forestry, Wood Industry, Agricultural Food Engineering 5(1): 37–42.
Clode, S., Kootsookos, P., Rottensteiner, F., 2004: The automatic extraction of roads from LiDAR data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 34(B7): 231–236.
Cloude, S., Rottensteiner, F., Koutsoukos, P., Zelnicker, E., 2007: Detection and vectorization of roads from lidar data. Photogramm. Eng. Remote Sens. 73(5): 517–536. https://doi.org/10.14358/PERS.73.5.517
Dandois, J.P., Ellis, E.C., 2010: Remote Sensing of Vegetation Structure Using Computer Vision. Remote Sens. 2(4): 1157–1176. https://doi:10.3390/rs2041157
Dickie, M., Speirs, C., 2021: Forest Road Costing Tools. Proceedings of The Joint 43rd Annual Meeting of Council on Forest Engineering (COFE) & the 53rd International Symposium on Forest Mechanization (FORMEC). COFE-FORMEC 2021 – Forest Engineering Family – Growing Forward Together, Corvallis, Oregon, U.S.A., September 27–30.
Dodson, E.M., 2021: Challenges in Forest Road Maintenance in North America. Croat. J. For. Eng. 42(1): 107–116. https://107-116. doi:10.5552/crojfe.2021.777
Even, P., Ngo, P., 2021: Automatic Forest Road Extraction from LiDAR Data of Mountainous Areas. In Lecture Notes in Computer Science, 1st ed.; Lindblad, J., Malmberg, F., Sladoje, N., Eds.; Springer International Publishing, Cham, Switzerland, 93–106 p. https://doi.org/10.1007/978-3-030-76657-3_6
FAO, 2011: State of the World's Forests 2011. Food and Agriculture Organization of the United Nations. Rome, Italy.
Faria, F., Zanco, G.A., Gunzi, A., Pimentel, A., Rocini, Y., Correa, H., Macedo, E., 2021: Forest Roads Optimization: People, Processes and Tools. Proceedings of The Joint 43rd Annual Meeting of Council on Forest Engineering (COFE) & the 53rd International Symposium on Forest Mechanization (FORMEC). COFE-FORMEC 2021 – Forest Engineering Family – Growing Forward Together, Corvallis, Oregon, U.S.A., September 27–30.
Ferraz, A., Mallet, C., Chehata, N., 2016: Large-scale road detection in forested montainous areas using airborne topographic lidar data. ISPRS J. Photogramm. Remote Sens. 112: 23–36. https://doi.org/10.1016/j.isprsjprs.2015.12.002
Fjeld, D., Bjerketvedt, J., Bråthen, M., 2021: Forest Road Availability – Inferences from Logging Truck Delivery Massages. Proceedings of The Joint 43rd Annual Meeting of Council on Forest Engineering (COFE) & the 53rd International Symposium on Forest Mechanization (FORMEC). COFE-FORMEC 2021 – Forest Engineering Family – Growing Forward Together, Corvallis, Oregon, U.S.A., September 27–30.
Forkuo, G.O., Borz, S.A., 2023: Accuracy and inter-cloud precision of low-cost mobile LiDAR technology in estimating soil disturbance in forest operations. Front. For. Glob. Change. 6: 1224575. https://doi:10.3389/ffgc.2023.1224575
Gollob, C., Ritter, T., Krassnitzer, R., Tockner, A., Nothdurft, A., 2021: Measurement of Forest Inventory Parameters with Apple iPad Pro and Integrated LiDAR Technology. Remote Sens. 13(16): 3129. https://doi:ARTN 3129 10.3390/rs13163129
Guan, H., Li, J., Cao, S., Yu, Y., 2016: Use of mobile LiDAR in road information inventory: a review. Int J Image Data Fus. 7(3): 219–242. https://doi:10.1080/19479832.2016.1188860
Gülci, S., Şireli, S., 2019: The Evaluation of SfM Technique in the Determination of Surface Deformation on Skidding Roads Following Timber Harvesting. Eur. J. Forest Eng. 5(2): 52–60. https://doi:10.33904/EJFE.600860
Guo, J., Tsai, M.J., Han, J.Y., 2015: Automatic reconstruction of road surface features by using terrestrial mobile lidar. Autom. Constr. 58: 165–175. https://doi:10.1016/j.autcon.2015.07.017
Hasegawa, H., Sujaswara, A.A., Kanemoto, T., Tsubota, K., 2023: Possibilities of Using UAV for Estimating Earthwork Volumes during Process of Repairing a Small-Scale Forest Road, Case Study from Kyoto Prefecture, Japan. Forests 14(4): 677. https://doi.org/10.3390/f14040677
Heidari, M.J., Najafi, A., Borges, J.G., 2022: Forest roads damage detection based on deep learning algorithms. Scand. J. For. Res. 37(5–8): 366–375. https:// doi.org/10.1080/02827581.2022.2147213
Hrůza, P., Mikita, T., Janata, P., 2016: Monitoring of forest hauling roads wearing course damage using unmanned aerial systems. Acta Univ. Agric. Silvic. Mendel. Brun. 64(5): 1537–1546. https://doi:10.11118/actaun201664051537
Hrůza, P., Mikita, T., Tyagur, N., Krejza, Z., Cibulka, M., Procházková, A., Patočka, Z., 2018: Detecting Forest Road Wearing Course Damage Using Different Methods of Remote Sensing. Remote Sens. 10(4): 492. https://doi:10.3390/rs10040492
Hui, Z., Hu, Y., Jin, S., Yevenyo, Y.Z., 2016: Road centerline extraction from airborne LiDAR point cloud based on hierarchical fusion and optimization. ISPRS J. Photogramm. Remote Sens. 118: 22–36. https://doi.org/10.1016/j.isprsjprs.2016.04.003
Jasiewicz, J., Stepinski, T.J., 2013: Geomorphons – a pattern recognition approach to classification and mapping of landforms. Geomorphology 182: 147–156, https://doi.org/10.1016/j.geomorph.2012.11.005
Kukko, A., Kaartinen, H., Hyyppä, J., Chen, Y., 2012: Multiplatform approach to mobile laser scanning. ISPRS Ann. Photogramm. Remote Sens. Spatial Inf. Sci. XXXIX-B2, 483–488. Presented at the XXIII ISPRS Congress, Melbourne, Australia, 25 August – 1 September.
Kukko, A., Kaijaluoto, R., Kaartinen, H., Lehtola, V.V., Jaakkola, A., Hyyppä, J., 2017: Graph SLAM correction for single scanner MLS forest data under boreal forest canopy. ISPRS J. Photogramm. Remote Sens. 132: 199–209. https://doi:10.1016/j.isprsjprs.2017.09.006
Landa, J., Prochazka, D., 2014. Automatic road inventory using LiDAR. Procedia Econ. Finance 12: 363–370. https://doi.org/10.1016/s2212-5671(14)00356-6
Lei, G.N., Yao, R.T., Zhao, Y.D., Zheng, Y.L., 2021: Detection and Modeling of Unstructured Roads in Forest Areas Based on Visual-2D Lidar Data Fusion. Forests 12(7): 820. https://doi.org/10.3390/f12070820
Leonardi, G., Barrile, V., Palamara. R., Suraci, F., Candela, G, 2018: Road degradation survey through images by drone. In International Symposium on New Metropolitan Perspectives 1st ed.; Calabrò, F., Della Spina, L., Bevilacqua, C., Eds.; Springer International Publishing, Cham, Switzerland, 222–228 p. http://doi.org/10.1007/978-3-319-92102-0_24
Liu, Q., Kampffmeyer, M., Jenssen, R., Salberg, A.B., 2019: Road mapping in LiDAR images using a joint-task dense dilated convolutions merging network. Proceedings of IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July – 02 August, 5041–5044 p. https://doi.org/10.1109/IGARSS.2019.8900082
Luetzenburg, G., Kroon, A., Bjørk, A.A., 2021: Evaluation of the Apple iPhone 12 Pro LiDAR for an Application in Geosciences. Sci. Rep. 11(1): 22221. https://doi.org/10.1038/s41598-021-01763-9
Maeda, H., Sekimoto, Y., Seto, T., Kashiyama, T., Omata, H., 2018: Road damage detection using deep neural networks with images captured through a smartphone. Comput.-Aided Civ. Infrastruct. Eng. 33: 1127–1141. https://doi.org/10.1111/mice.12387
Mikita, T., Krausková, D., Hruza, P., Cibulka, M., Patocka, Z., 2022: Forest Road Wearing Course Damage Assessment Possibilities with Different Types of Laser Scanning Methods including New iPhone LiDAR Scanning Apps. Forests 13(11): 1763. https://doi.org/10.3390/f13111763
Mokros, M., Mikita, T., Singh, A., Tomastík, J., Chudá, J., Wezyk, P., Kuželka, K., Surový, P., Klimánek, M., Zieba-Kulawik, K., Bobrowsi, R., Liang, X., 2021: Novel low-cost mobile mapping systems for forest inventories as terrestrial laser scanning alternatives. Int. J. Appl. Earth Obs. Geoinf. 104: 102512. https://doi.org/10.1016/j.jag.2021.102512
Murray, A.T., 1998: Route planning for harvest site access. Can. J. For. Res. 28(7): 1084–1087. https://doi.org/10.1139/x98-122
Najafi, A., Sobhani, H., Saeed, A., Dom, M.M., Whajer, M.M., 2008: Planning and assessment of alternative forest road and skidding networks. Croat. J. For. Eng. 29(1): 63–73.
Nininahazwe, F., Martineau, M.A., Toupin, D., Genest, M.A., Bour, B., Varin, M., 2024: Développement d'une méthode automatisée d'identification des chemins forestiers à fort potentiel de degradation. Centre d'Enseignement et de Recherche en Foresterie de Sainte-Foy 2024(06): 12. http://doi.org/10.13140/RG.2.2.21045.69603
Nita, M.D., Borz, S.A., 2023: Accuracy of a Smartphone-based freeware solution and two shape reconstruction algorithms in log volume measurements. Comput. Electron. Agric. 205: 107653. https://doi:10.1016/j.compag.2023.107653
Özmen, M., Akgül, M., Yurtseven, H., Şentürk, N., Akay, A.O., 2022. Evaluation of forest road reconstruction project via BIM approach with SLAM LiDAR data. Proc. Joint 44th Annu. Meeting of Council on Forest Engineering (COFE), 54th Int. Symp. on Forest Mechanization (FORMEC), and 2022 IUFRO All-Division 3 Meeting, Oregon, USA, 25–29 p.
Pellegrini, M., Grigolato, S., Cavalli, R., 2013: Spatial Multi-Criteria Decision Process to Define Maintenance Priorities of Forest Road Network: an Application in the Italian Alpine Region. Croat. J. For. Eng. 34(1): 31–42.
Pierzchala, M., Talbot, B., Astrup, R., 2014:. Estimating Soil Displacement from Timber Extraction Trails in Steep Terrain: Application of an Unmanned Aircraft for 3D Modelling. Forests 5(6): 1212–1223. https://doi:10.3390/f5061212
Potočnik, I., Yoshioka, T., Miyamoto, Y., Igarashi, H., Sakai, H., 2005: Maintenance of forest road network by natural forest management in Tokyo University Forest in Hokkaido. Croat. J. For. Eng. 26(2): 71–78.
Prendes, C., Bujián, S., Ordoňez, C., Canga, E., 2019: Large scale semi-automatic detection of forest roads from low density LiDAR data on steep terrain in Northern Spain. IFOREST 12(4): 366–374. https://doi.org/10.3832/ifor2989-012
Pszenny, D., 2020: Possibilities of using UAV and orthophotomosaics to analyze the condition and distribution of operational routes. Sylwan 164(11): 913–919. https://doi:10.26202/sylwan.2020103
Saito, M., Goshima, M., Aruga, K., Matsue, K., Shuin, Y., Tasaka, T., 2013: Study of Automatic Forest Road Design Model Considering Shallow Landslides with LiDAR Data of Funyu Experimental Forest. Croat. J. For. Eng. 34(1): 1–15.
Sakai, H., 2017: Challenges in Road Construction and Timber Harvesting in Japan. Croat. J. For. Eng. 38(2): 187–195.
Starke, M., Geiger, C.H., 2022: Machine vision based waterlogged area detection for gravel road condition monitoring. Int. J. For. Eng. 33(3): 243–249. https://doi.org/10.1080/14942119.2022.2064654
Starke, M., Kunneke, A., Ziesak, M., 2021: Monitoring of Carriageway Cross Section Profiles on Forest Roads: Assessment of an Ultrasound Data Based Road Scanner with TLS Data Reference. Forests 12(9): 1191. https://doi.org/10.3390/f12091191
Talbot, B., Pierzchała, M., Astrup, R., 2017: Applications of remote and proximal sensing for improved precision in forest operations. Croat. J. For. Eng. 38(2): 327–336.
The Parliament of the Czech Republic, 1997: Road Act and Amendments to Certain Acts (Road Act); Act No. 13/1997 Coll; on Forests and on Amendments to Certain Acts (Road Act); The Parliament of the Czech Republic: Prague, Czech Republic.
Tomaštík, J., Mokroš, M., Saloš, S., Chudý, F., Tunák, D., 2017: Accuracy of photogrammetric UAV-based point clouds under conditions of partially-open forest canopy. Forests 8(5): 151. https://doi:10.3390/f8050151
Tomljanović, K., Kolar, A., Đuka, A., Franjević, M., Jurjević, L., Matak, I., Ugarković. D., Balenović, I., 2022: Application of UAS for Monitoring of Forest Ecosystems – A Review of Experience and Knowledge. Croat. J. For. Eng. 43(2): 487–504. https://doi:10.5552/crojfe.2022.1727
Toscani, P., Sekot, W., Holzleitner, F., 2020: Forest Roads from the Perspective of Managerial Accounting-Empirical Evidence from Austria. Forests 11(4): 378. https://doi.org/10.3390/f11040378
Turk, Y., Aydin, A., Eker, R., 2022: Comparison of Autonomous and Manual UAV Flights in Determining Forest Road Surface Deformations. Eur. J. For. Eng. 8(2): 77–84. http://doi.org/10.33904/ejfe.1206846
Vallet, B., Papelard, J.P., 2015: Road orthophoto/DTM generation from mobile laser scanning. ISPRS Ann. Photogramm. Remote Sens. Spat. 2(3/W5): 377–384. https://doi:10.5194/isprsannals-II-3-W5-377-2015
Wang, G., Burrow, M., Ghataora, G., 2020: Study of the Factors Affecting Road Roughness Measurement Using Smartphones. J. Infrastr. Syst. 26(3): 04020020. https://doi.org/10.1061/(ASCE)IS.1943-555X.0000558
Watanabe, M., Saito, M., Toda, K., Shirasawa, H., 2023: Rain-Driven Failure Risk on Forest Roads around Catchment Landforms in Mountainous Areas of Japan. Forests 14(3): 537. https://doi.org/10.3390/f14030537
Yan, L., Li, Z., Liu, H., Tan, J.X., Zhao, S.N., Chen, C.J., 2017: Detection and classification of pole-like road objects from mobile LiDAR data in motorway environment. Opt. Laser Technol. 97: 272–283. https://doi:10.1016/j.optlastec.2017.06.015
Yang, B.S., Fang, L.N., Li, J., 2013: Semi-automated extraction and delineation of 3D roads of street scene from mobile laser scanning point clouds. ISPRS J. Photogramm. Remote Sens. 79: 80–93. https://doi:10.1016/j.isprsjprs.2013.01.016
Yang, C.H., Regan, A.C., Kim, I.S., 2014: Estimating road management equipment inventory needs and associated purchase costs. Transp. Policy. 36: 242–247. https://doi:10.1016/j.tranpol.2014.09.009
Yoshida, M., Sakurai, R., Sakai, H., 2019: Forest road planning using precision geographic data under climate change. Int. J. For. Eng. 30(3): 219–227. https:// doi:10.1080/14942119.2018.1498687
Yurtseven, H., Akgul, M., Akay, A.O., Akburak, S., Cigizoglu, H.K., Demir, M., Eksi, T.O.A.M., 2019: High accuracy monitoring system to estimate forest road surface degradation on horizontal curves. Environ. Monit. Assess. 191(1): 32: https://doi: 10.1007/s10661-018-7155-8
© 2025 by the authors. Submitted for possible open access publication under the
terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Authors' addresses:
Assoc. prof. Petr Hrůza, PhD
e-mail: petr.hruza@mendelu.cz
Mendel University in Brno
Faculty of Forestry and Wood Technology
Department of Landscape Management
Zemědělská 3
613 00 Brno
THE CZECH REPUBLIC
Assoc. prof. Tomáš Mikita, PhD *
e-mail: tomas.mikita@mendelu.cz
Dominika Krausková, MSc
e-mail: dominika.krauskova@mendelu.cz
Mendel University in Brno
Faculty of Forestry and Wood Technology
Department of Forest Management and Applied Geoinformatics
Zemědělská 3
613 00 Brno
THE CZECH REPUBLIC
* Corresponding author
Received: September 07, 2024
Accepted: March 26, 2025
Original scientific paper