
Energy Efficiency of a Traction-Assisted Forwarder vs. a Cable Yarder
doi: https://doi.org/10.5552/crojfe.2026.4055
volume: issue, issue:
pp: 11
- Author(s):
-
- Leitner Thomas
- Vidoni Renato
- Spinelli Raffaele
- Article category:
- Original scientific paper
- Keywords:
- modeling, fuel consumption, sensitivity analysis, steep terrain
Abstract
HTML
A substantial percentage of global timber grows on challenging and steep terrain. This resource can be accessed with cable yarders or traction-assisted forwarders. When choosing which harvesting solution to employ for a particular logging job, its energy efficiency should also be considered, given the ever-rising energy cost. This theoretical study develops analytical models to determine and compare the fuel consumption of a cable yarder and a traction-assisted forwarder used for uphill extraction. Simulation results indicate that forwarding requires on average 69% more fuel per unit of transported payload across a range of work conditions (e.g. distance, slope gradient, payload size) and at least 47% more fuel under all simulated conditions. The efficiency advantage of cable yarding could be boosted further by transporting heavier loads. In cable yarding, a significant portion of fuel is consumed during standstill, when the engine runs idle or at low efficiency for extended periods of time. In forwarding, loading and unloading are particularly energy intensive. While cable yarders could greatly benefit from electrification, forwarders may see lower efficiency gains due to the challenges in electrifying linear hydraulic actuators in a cost-effective and robust manner.
Energy Efficiency of a Traction-Assisted Forwarder vs. a Cable Yarder
Stefan Leitner, Renato Vidoni, Raffaele Spinelli
https://doi.org/10.5552/crojfe.2026.4055
Abstract
A substantial percentage of global timber grows on challenging and steep terrain. This resource can be accessed with cable yarders or traction-assisted forwarders. When choosing which harvesting solution to employ for a particular logging job, its energy efficiency should also be considered, given the ever-rising energy cost. This theoretical study develops analytical models to determine and compare the fuel consumption of a cable yarder and a traction-assisted forwarder used for uphill extraction. Simulation results indicate that forwarding requires on average 69% more fuel per unit of transported payload across a range of work conditions (e.g. distance, slope gradient, payload size) and at least 47% more fuel under all simulated conditions. The efficiency advantage of cable yarding could be boosted further by transporting heavier loads. In cable yarding, a significant portion of fuel is consumed during standstill, when the engine runs idle or at low efficiency for extended periods of time. In forwarding, loading and unloading are particularly energy intensive. While cable yarders could greatly benefit from electrification, forwarders may see lower efficiency gains due to the challenges in electrifying linear hydraulic actuators in a cost-effective and robust manner.
Keywords: modeling, fuel consumption, sensitivity analysis, steep terrain
1. Introduction
Winches have been used for traction assistance for a long time, as witnessed by the over half-million GMC trucks deployed by the US Army and its allies between 1940 and 1945; the largest majority of those trucks sported a solid winch bolted to their chassis and used for assisting traction when negotiating soft or steep terrain (Jackson 2019). That solution was so successful as to be generalized on a wide variety of military vehicles (e.g. Dodge, Studebaker, M2 and M3 half-tracks etc.). Still today, many modern off-road vehicles are fitted with a frontal recovery winch when used in heavy-duty applications or competitive sports. In fact, the widespread use of military surplus in post-war logging suggests that the practice of winching logs to the roadside began as an improvised solution sparked by the availability of those winches and was not derived from a deliberate plan to replace the traditional draught horse with a compact traction aid (Felt 2002).
Loggers have been using their forestry winches as a makeshift solution to improve the mobility of other vehicles pushed far beyond their mobility limits in countless and hazardous makeshift solutions; hence, winch-assisted traction »per se« is not really a new concept and must have been known to loggers already 70 years ago. Better designed (and safer) traction assistance solutions have also been proposed for use in industrial logging several times in the past. The very first scientific studies come from North America (Mc Kenzie and Richardson 1978, Gao and Hartsough 1988), where the concept eventually developed into a commercial product – a feller buncher – which was extensively used in the Pacific Northwest (Hemphill 1991). That same idea was introduced to Europe more than a decade later (Bombosch et al. 2003), but both the North American and the European realizations remained niche applications until winch-assist technology was adopted by the New Zealand forest industries.
The enterprising attitude of local operators combined with the uniquely favorable work conditions of New Zealand forestry led to a rapid development of winch-assist technology, which expanded far beyond the narrow confines of a specialty application. A crucial contributor to the success of winch-assist technology was the need of tackling an increasingly larger proportion of steep sites, while improving workplace safety through mechanization (Raymond 2018). The obvious answer to such challenge was to place people inside a machine and make that machine capable of negotiating slopes once considered unpassable. The New Zealand forest industry decided to overcome that challenge and acted with exemplary resolve: within few years, winch-assist solutions had multiplied, becoming both effective and widespread. NZ winch-assist technology is now widely exported, and it has inspired similar technology solutions abroad (Holzfeind et al. 2020, Visser and Stampfer 2015).
In Europe, the potential of winch-assist technology was quickly noticed by the manufacturers of cut-to-length (CTL) equipment, bent on extending the terrain capability of their products. The interests of manufactures and operators were fully aligned: the former wanted to expand their sales, the latter increase the utilization of their equipment. Today, winch-assisted harvesters and forwarders are becoming commonplace in the European mountain, and their numbers are growing. That represents a significant deviation from the original New Zealand developments, which aimed at increasing the terrain capability of felling and bunching machines, tasked with facilitating cable extraction. Intent on improving the gradeability of their forwarders, Europeans have turned winch assistance into traction assistance: the winch is not only used to stabilize the machine while working (e.g. felling), but it also serves to increase its mobility when negotiating steep slopes. That allows ground-based extraction equipment to expand over the ground once occupied by cable yarders and compete against them. In that regard, the question arises about where is the break-even between the two technologies. A first step in trying to answer that question consists in determining which is the most efficient under any given conditions, with simple physics as the starting point.
Cable extraction with tower yarders and forwarder extraction with or without traction-assist share many communalities but also differ in a few key aspects. In general, both systems operate in a cyclic manner. That is, the equipment moves to the felling site, picks up its payload via a winch or a loader and carries it to the landing area, where it unloads it. Then the cycle is repeated. In the case of forwarder extraction, the whole carrier drives back and forth between the felling site and the unloading area. In the case of cable extraction, most of the equipment stands still, with only a comparably light carriage moving back and forth between the loading and the unloading sites. The fact that cable extraction operates with only a fraction of the total equipment mass in motion suggests that it may be more efficient than forwarder extraction. Forwarder extraction on the other hand allows for a much higher payload per cycle. Also, there are no cables in motion with forwarder extraction, except for the traction-assist option. It is therefore not immediately clear which extraction system is more efficient in terms of fuel consumption per transported payload. A further difference is that the forwarder picks up the logs from small stacks and unloads them onto larger stacks, with a significant concentration effect. In turn, the yarder normally picks up scattered logs and unloads them onto a large pile, with a similar concentration effect, but not exactly in the same form. All things considered, both systems achieve comparable load concentration levels, although the form and size of the accumulations before and after extraction are different.
Therefore, the goal of this paper is to offer a first theoretical estimate of energy and fuel efficiency for a cable yarder and a traction-assisted forwarder, tasked with uphill extraction under a range of terrain conditions. The null hypothesis is that of no significant difference in the energy and fuel efficiency of a traction-assisted forwarder and a cable yarder. The study is a detailed desktop exercise, designed to draw a baseline for the tests that will eventually follow. We believe that a hard look into the physics of the two extraction principles can direct future research and make it more efficient and useful. The advantage of this exercise is that we can model operationally comparable options, which are quite difficult and expensive to recreate in a real-life experimental study.
2. Materials and Methods
2.1 Model Principles
The models developed in this work rely on basic physical principles, such as the change of potential energy of masses incurred when they are moved between positions with different elevations, frictional losses caused by contact forces between moving objects, as well as the common efficiency and consumption losses of drivetrains and combustion engines, respectively.
Table 1 Input variables for the models
|
Variable |
Cableway |
Forwarder |
Unit |
Source |
Description |
|
mm |
700 |
15000 |
kg |
Varch et al. 2021, Holzfeind et al. 2018 |
Carriage / forwarder weight |
|
mw |
– |
2300 |
kg |
Holzfeind et al. 2018 |
Weight traction winch, including cable |
|
mc |
0.64 |
0.94 |
kg/m |
Holzfeind et al. 2018 |
Specific mass mainline / traction cable |
|
mp |
1305 |
8400 |
kg |
Varch et al. 2021, Holzfeind et al. 2018 |
Payload mass |
|
g |
9.81 |
9.81 |
m/s2 |
– |
Gravitational acceleration |
|
fw |
– |
50 |
kN |
A common value in Holzfeind et al. 2019 |
Force of traction winch |
|
D |
110 |
111 |
m |
Varch et al. 2021, Holzfeind et al. 2018 |
Cableway extraction / ground (driven) distance |
|
α |
50.1 (26.6) |
50.1 (26.6) |
% (°) |
Varch et al. 2021, Holzfeind et al. 2018 |
Average skyline / terrain slope |
|
η |
0.15 |
0.15 |
%/100 |
Based on common efficiencies: hydraulics – 60%, engine – 25% |
Fuel to winch drum / wheel hub drive efficiency. A Diesel engine running at 25 % efficiency consumes about 338.2 g/kWh of fuel (ASABE Standards 2012) |
|
h |
10 |
– |
m |
– |
Skyline height (payload suspension height) |
|
d |
10 |
– |
m |
– |
Mean lateral yarding distance |
|
μlv |
0.85 |
– |
– |
An average value of data reported in Oh and Cha 2001 |
Friction coefficient between logs and ground during lateral yarding (skidding coefficient) |
|
Qfnl |
4 |
4 |
l/h |
Assumption |
No-load fuel consumption (moving downhill, lowering the load) |
|
γDiesel |
38.6 · 106 |
J/l |
IOR Energy 2024 |
Specific energy density of Diesel |
|
|
tl |
3.5 |
18 |
min |
Varch et al. 2021, Holzfeind et al. 2018 |
Total delays and time to hook and unhook / load and unload the payload, per haul |
|
tr |
2 |
6.6 |
min |
Varch et al. 2021, Holzfeind et al. 2018 |
Time to return the carriage / forwarder to the felling site |
|
Qftl |
– |
11.7 |
l/h |
Average of data reported in Manner et al. 2016 |
Fuel consumption during loading and unloading phase |
|
dp |
900 |
kg/m3 |
Common practice |
Density of the payload (timber) |
|
Models specifically assess the energy need for a complete transport cycle. The result is then converted to equivalent energy need and fuel consumption per unit of transported payload. The objective is to conduct a fair comparison under the same simulated work conditions, while keeping the total number of input variables within manageable limits, to the benefit of transparency. All major factors contributing to energy consumption are included, while the models are kept as simple as possible. The models do not include any dynamic factors but consider exclusively the energy components corresponding to the different work phases. This way it is straightforward to set parameters for a wide array of setups and work conditions, enabling the widespread use of these models. Table 1 provides the full set of input parameters for each of the systems, including nominal/reference values extracted from previous studies. The source of the data is also indicated in the table. Furthermore, sensitivity analyses were conducted by varying extraction distance, slope gradient and payload mass, in order to explore the impact of work conditions on the energy and fuel efficiency of cable extraction and forwarder extraction. Equipment-specific parameters were kept constant throughout those simulations.
2.2 Models for Cable Extraction
The reference parameters for the cable extraction system in Table 1 correspond to the setup described by Varch et al. (2021) and are based on a MOUNTY 4000 truck-mounted tower yarder (Mercedes Benz Arocs AK3342 6 × 6 truck) equipped with a E-LINER 5000 slack-pulling carriage, both manufactured by Konrad Forsttechnik GmbH. The carriage does not require its own energy supply and its slack-pulling device uses an electric motor powered by a supercapacitor, which is charged by retarding mainline cable movement during lateral yarding. The total energy consumption of a complete cable extraction cycle is therefore well approximated by summing the following energy consumption terms of the yarder:
Ely – energy consumption for lateral yarding, Ws
Eps – energy consumption for payload suspension, Ws
Eih – energy consumption for inhauling, Ws
Eid – energy consumption during standstill and low power phases (such as out-hauling), Ws.
It is challenging to characterize highly dynamic and volatile work processes such as load breakout. For that reason, only lateral yarding is explicitly modeled in Eq. 1, which considers both the masses of the payload (mp) and of the mainline cable (mc). The payload is yarded perpendicular to the cable corridor for a distance (d) and subjected to friction coefficient (µly). Part of the mainline cable (h) is vertically suspended, while another portion (D) moves uphill in parallel to the slope (α) of the terrain. The lateral yarding efficiency and gravitational acceleration are respectively denoted by η and g.

Eq. 2 describes the energy consumption for payload suspension, considering both the mass of the payload (mp) and the average mass of mainline cable in motion mc (D sin(α) + h/2) during that work phase.

Eq. 3 describes the energy consumption during inhauling by computing the total change of potential energy of the carriage (mm), payload (mp) and mainline cable (mc D/2), with the medium length of mainline cable in motion during this phase being D/2.

All remaining work phases (machine standstill during choker setting and unloading as well as low power phases when lowering the hook, lifting the empty hook or outhauling downhill) are considered via a corresponding no-load fuel consumption rate (Qfnl) and work phase duration (tl, tr) in Eq. 4. Since these work phases constitute a major portion of the overall cycle time, energy consumption is expected to play a significant role in determining overall energy efficiency, despite low specific fuel consumption.

The total energy need (kWh) and fuel consumption (l) for one complete transport cycle are thus given in Eq. 5 and Eq. 6, respectively.


From the energy consumption of a complete extraction cycle and the density of the payload follow the specific energy consumption (kWh/m3) and the specific fuel consumption (l/m3) as follows (Eq. 7, Eq. 8):


2.3 Models for Traction-Assisted Forwarding
The reference parameters of this study – also presented in Table 1 – were borrowed from the study by Holzfeind et al. (2018) and refer to a JOHN DEERE 1110E forwarder equipped with a HAAS Highgrade traction winch. The total energy consumption incurred for the complete work cycle of such equipment is approximated by summing the following energy consumption items:
Eih-W – energy consumption of the winch during inhauling, Ws
Eih-tr – energy consumption of forwarder traction during inhauling, Ws
Eid – energy consumption during low power phases such as out-hauling (downhill), Ws
El – energy consumption for loading and unloading, Ws.
The energy consumption of the winch system during inhauling is given in Eq. 9. It is assumed that the winch system does not consume energy during all other phases: when the empty forwarder moves downhill and at standstill, the winch drive is not engaged in a way that requires the hydraulic pumps to build retarding or holding pressure.

Eq. 10 models the energy consumption for traction during inhauling. The force of gravity along the slope of all involved masses (mm, mw, mp) is decreased by the winch force. The remaining traction force has to be delivered by the forwarder hub drives.

In general,

so that Eih-tr is positive. In plain terms this means that the winch force alone would generally not be enough to move the loaded forwarder uphill. If the parameters are chosen so that condition (11) is not met, Eih-tr should be set to zero. It is clear by observation that an increase of fw leads to an increase of Eih-W and an equivalent decrease of Eih-tr, and vice-versa. This means that since the efficiency is assumed to be the same for both the winch system and for forwarder traction, fw has no impact on the overall energy and fuel consumption.
The energy consumption during low power phases and during loading and unloading are given in Eq. 12 and Eq. 13, respectively.


The energy consumption to overcome rolling drag and slip losses is not included in this study. Rolling drag is associated with wheel and ground deformation. Eight wide forwarder wheels, frequently complemented by traction chains or bogie tracks, are often employed to maximize the ground contact surface area and to minimize this effect. A drawback is that they add several hundreds of kg per track to the tare weight. Despite tracks, rolling drag may be a significant factor in wet and swampy terrain. Slip losses should not be a major factor especially in traction-assisted forwarder projects. Thus, the total energy need (kWh) and fuel consumption (l) for one complete transport cycle are given in Eq. 14 and Eq. 15, respectively.


Using the energy consumption of a complete extraction cycle and the density of the payload, the specific energy consumption (kWh/m3) and the specific fuel consumption (l/m3) can be calculated as follows (Eq. 16, Eq. 17):


2.4 Total Transport Efficiency
The theoretical minimum energy required (kWh/m3) for (uphill) extraction could be defined as the net change of potential energy of the payload during the yarding process. That is:

The result of Eq. 18 is a theoretical value, which offers an insight into the total transport efficiency of cable extraction and forwarder extraction, computed with the help of Eq. 19 and Eq. 20, respectively.


These results indicate what is the fraction of the energy contained in the Diesel fuel that is converted to mechanical work and used to change the potential energy of the payload (in the case of uphill extraction). Given that the conversion efficiency of Diesel-hydraulic drivetrain is about 15%, this value should only be a few percent points.
3. Results
3.1 General
The analytical models developed in the previous section are implemented into Excel. The results of all equations based on the default data listed in Table 1 are shown in Table 2.
Table 2 Results for cable yarding and traction-assisted forwarding based on default data
|
Cable extraction |
Traction-assisted forwarder extraction |
||
|
Result |
Equation |
Result |
Equation |
|
Ely = 0.75 MWs |
(1) |
Eih-W = 37.0 MWs |
(9) |
|
Eps = 0.88 MWs |
(2) |
Eih-tr = 46.5 MWs |
(10) |
|
Eih = 6.57 MWs |
(3) |
Eid = 17.0 MWs |
(12) |
|
Eid = 14.15 MWs |
(4) |
El = 139.0 MWs |
(13) |
|
Ecycle-yar = 6.2 kWh |
(5) |
Ecycle-for = 66.5 kWh |
(14) |
|
Vcycle-yar = 0.6 l |
(6) |
Vcycle-for = 6.2 l |
(15) |
|
Esp-yar = 4.3 kWh/m3 |
(7) |
Esp-for = 7.1 kWh/m3 |
(16) |
|
Vsp-yar = 0.40 l/m3 |
(8) |
Vsp-for = 0.66 l/m3 |
(17) |
Cable extraction uses 40% less energy to move 1 m3 of wood over the same 110 m distance, compared to forwarder extraction. Loading and unloading present the highest energy demand in forwarder extraction, whereas standstill and low power phases consume a considerable portion of the energy in cable extraction. In contrast, energy drain is relatively small during inhauling, despite it being performed uphill, against gravity. As the load is moved uphill, its potential energy increases by 0.121 kWh/m3, which is the theoretical minimum energy required to complete the transport task. To achieve such an increase, cable extraction uses 4.3 kWh/m3 (total transport efficiency of 2.8%), while forwarder extraction uses 7.1 kWh/m3 (total transport efficiency of 1.6%).
However, those results are only true for the specific distance, slope and payload assumed for the simulation. Energy efficiency is likely to change as those factors change: hence the interest in conducting a proper sensitivity analysis.
3.2 Sensitivity to Extraction Distance
Extraction distance (D) was varied from 50% to 300% of the nominal value of 110 m, that is from 55 m to 330 m. The maximum distance was defined by the capacity of forwarder extraction, which is limited by winch cable length. Fig. 1 shows the fuel consumption of cable extraction and forwarder extraction as a function of D, whereas Fig. 2 depicts the breakdown of the fuel consumption as a function of D among individual work-phases for cable extraction and forwarder extraction. Compared with cable extraction, forwarder extraction uses 70% more fuel per m3 at the shortest distance, and 80% at the longest one. In cable extraction, loading and unloading represent the largest energy drain, especially when extraction distance is short. For an extraction distance of about 230 m, the fuel consumption incurred by inhauling equals the cumulative consumption incurred during the low power work phases. The fuel used for lateral yarding and load lifting represents a negligible proportion of overall consumption. In forwarder extraction, loading and unloading represent up to 70% of total fuel consumption. As the extraction distance increases, both the consumption for forwarder traction and winch pull increase proportionally, so that the contribution of loading and unloading drops to about 40% at the extraction distance of 250 m. Low power phases in forwarder extraction are comparably short and consume little fuel.
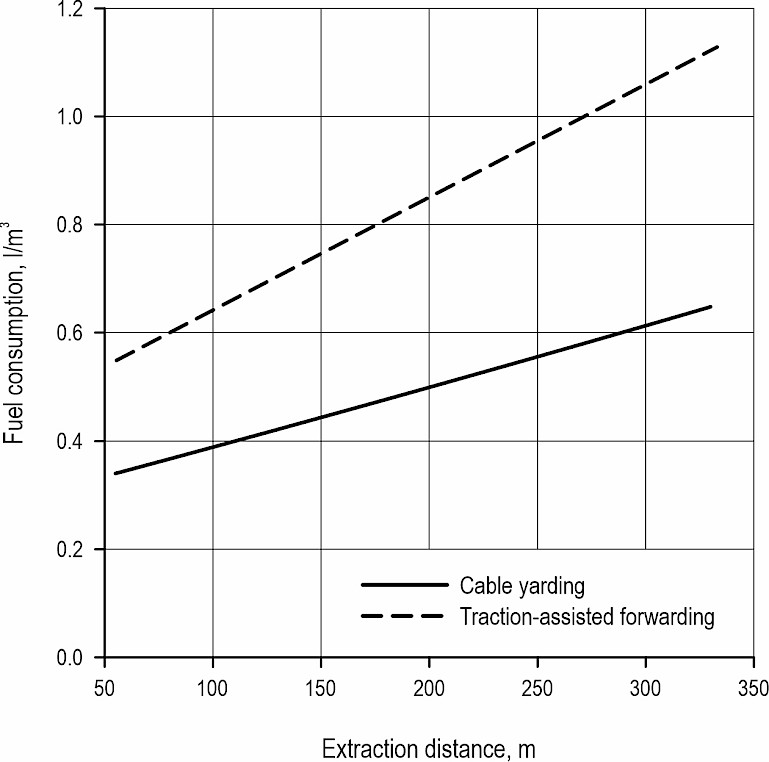
Fig. 1 Fuel consumption as a function of extraction distance
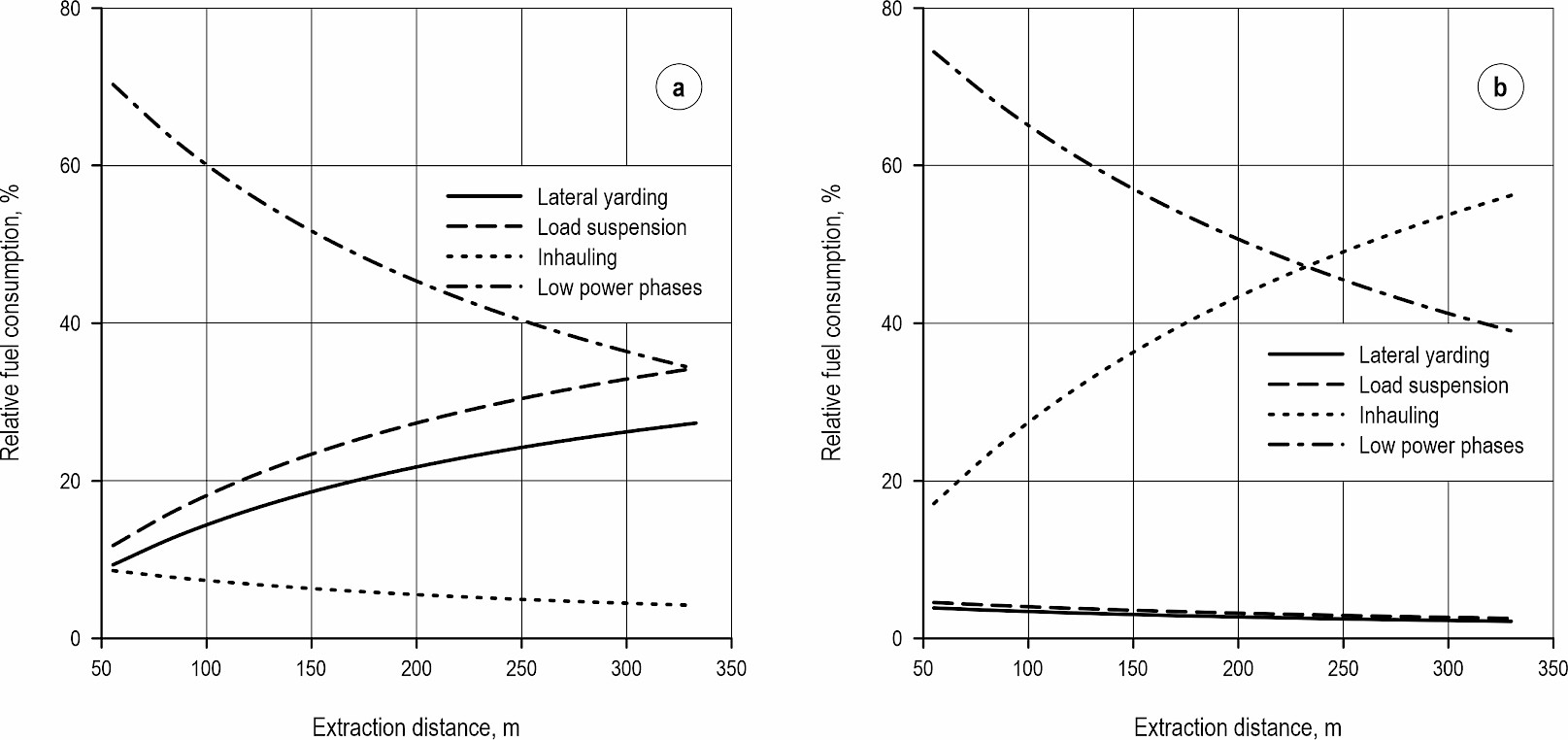
Fig. 2 Fuel consumption breakdown as a function of extraction distance for forwarder extraction (a) and cable extraction (b)
3.3 Sensitivity to Slope Gradient
Figs. 3 and 4 provide results for the same response variables as Fig. 1 and 2, but this time as a function of variable slope gradients. For the purpose of the sensitivity analysis, the default slope gradient of 50.1% (26.6°) is varied from 23.6% (13.3°) to 133.7% (53.2°), which constitutes a range of 50% to 200% of the baseline slope, respectively. In the case of forwarder extraction, terrain slope only affects the inhauling phase, while in the case of cable extraction it also has a small effect on the lateral yarding and loading phases, due to the moving mainline. In general, increases of slope gradient or of extraction distance have the same effect on energy consumption. The discussion provided for the sensitivity analysis on extraction distance therefore also applies to this section.
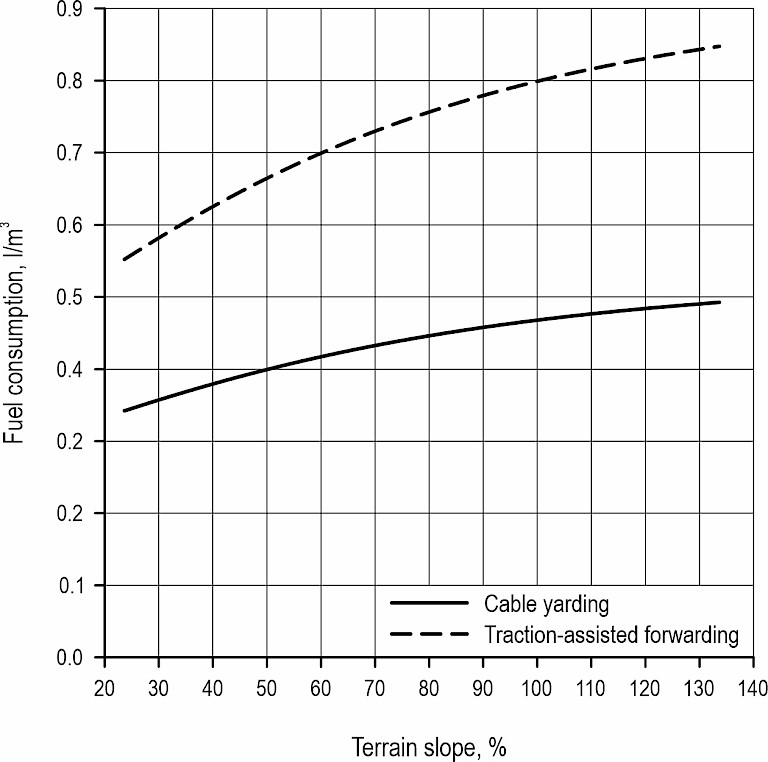
Fig. 3 Fuel consumption as a function of slope gradient
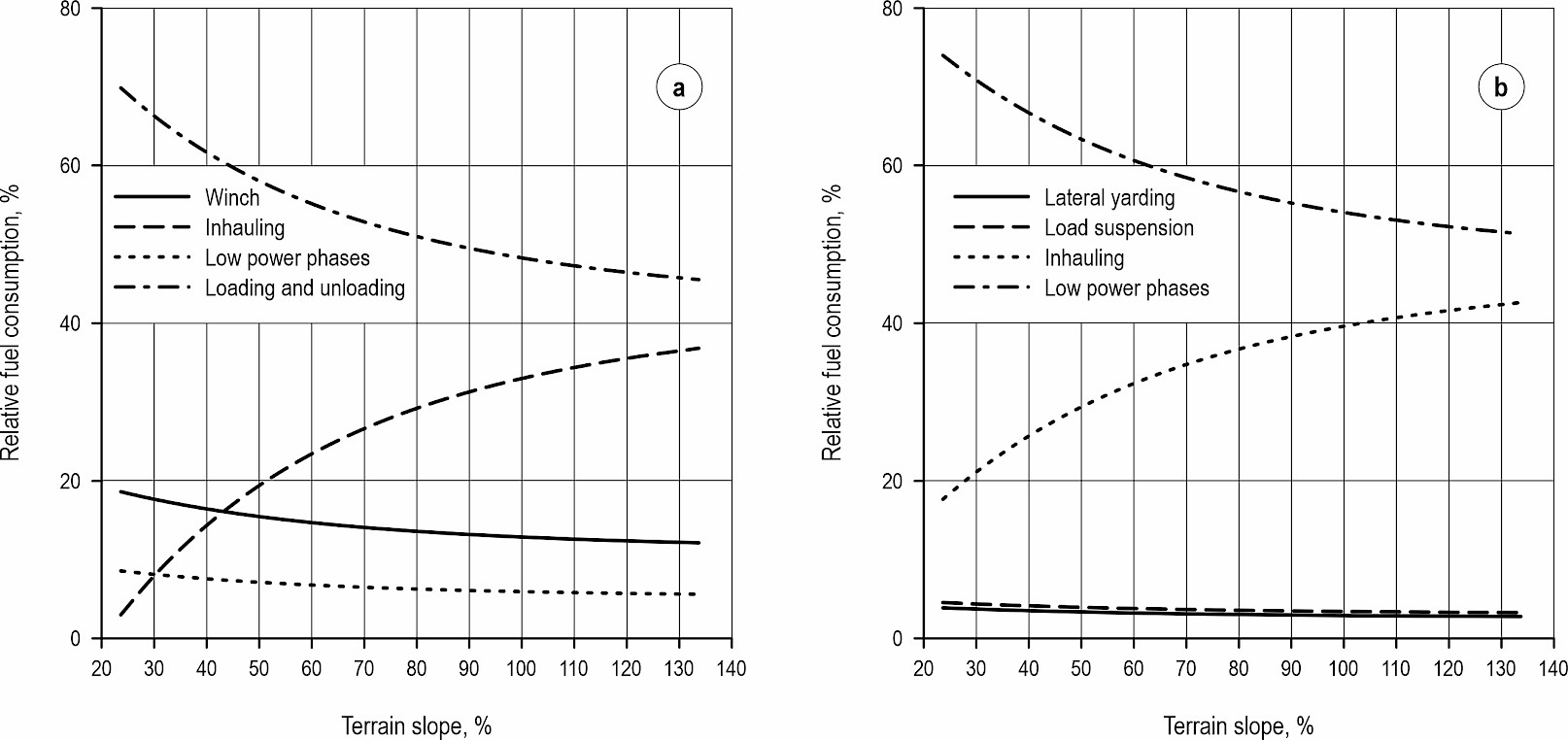
Fig. 4 Fuel consumption breakdown as a function of slope gradient for forwarder extraction (a) and cable extraction (b)
3.4 Sensitivity to Payload Mass
Payload mass was varied from 10% to 150% of the default values of 1305 kg and 8400 kg for cable extraction and forwarder extraction, respectively. To provide a direct comparison for the fuel consumption of cable extraction and forwarder extraction, the horizontal axis of Fig. 4 represents the percent variation of payload mass from the default value – not the absolute value. Both extraction solutions benefit from maximizing payload mass. By increasing payload mass, tare weight becomes less and less relevant, reducing the specific consumption per payload mass. Consumption in cable extraction decreases by about 37% if the payload increases to 150% of the nominal value. Forwarder extraction achieves a saving of 44% under the same conditions. Given a sufficiently strong setup, the cable extraction equipment considered in the present study could cope with a 50% payload increase; in contrast, the forwarder may lack the structural strength and/or the storage space to accommodate it safely. That indicates that maximizing payload capacity is more important for cable extraction than for forwarder extraction, or simply that users tend to underutilize the payload capacity of cable extraction more than they do with forwarder extraction. In fact, underutilization of payload capacity might also depend on piece size; when piece size is very small it may be difficult to accumulate a large enough payload, and that difficulty is higher with cable extraction because the number of choker slings that can be connected to the mainline faces obvious technical limitations.
The breakdown of fuel consumption among individual work phases reacts to changes in payload size in the same way as it does to changes in extraction distance or slope gradient (Fig. 5). Payload increases reduce the impact of low power phases but increase consumption during payload suspension and inhauling for cable extraction. They should also have an impact on loading and unloading in forwarder extraction; however, current models (Eq. 13) are based solely on a fuel flow rate and a duration, so that this effect does not appear in the results.
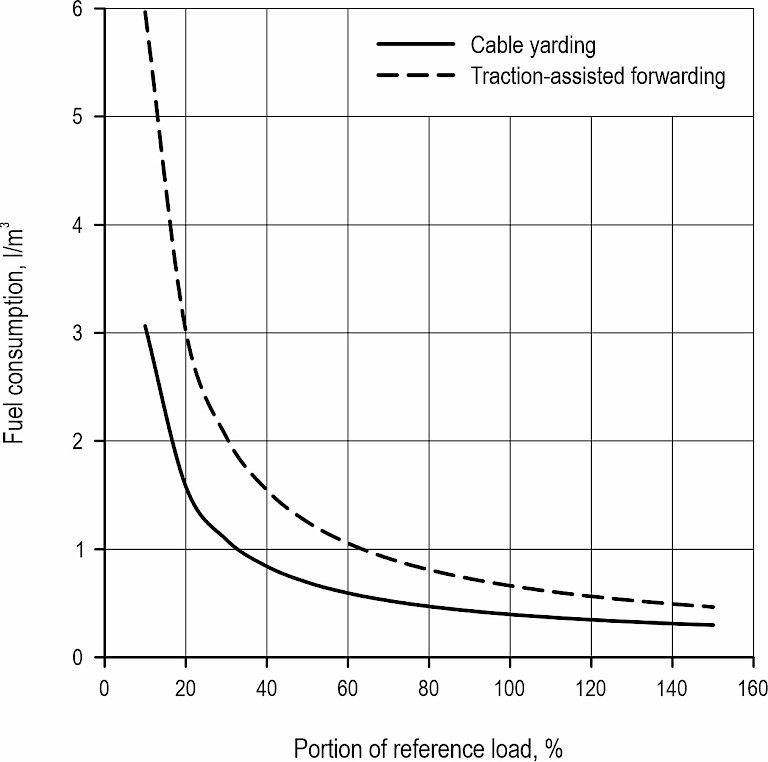
Fig. 5 Fuel consumption as a function of payload mass
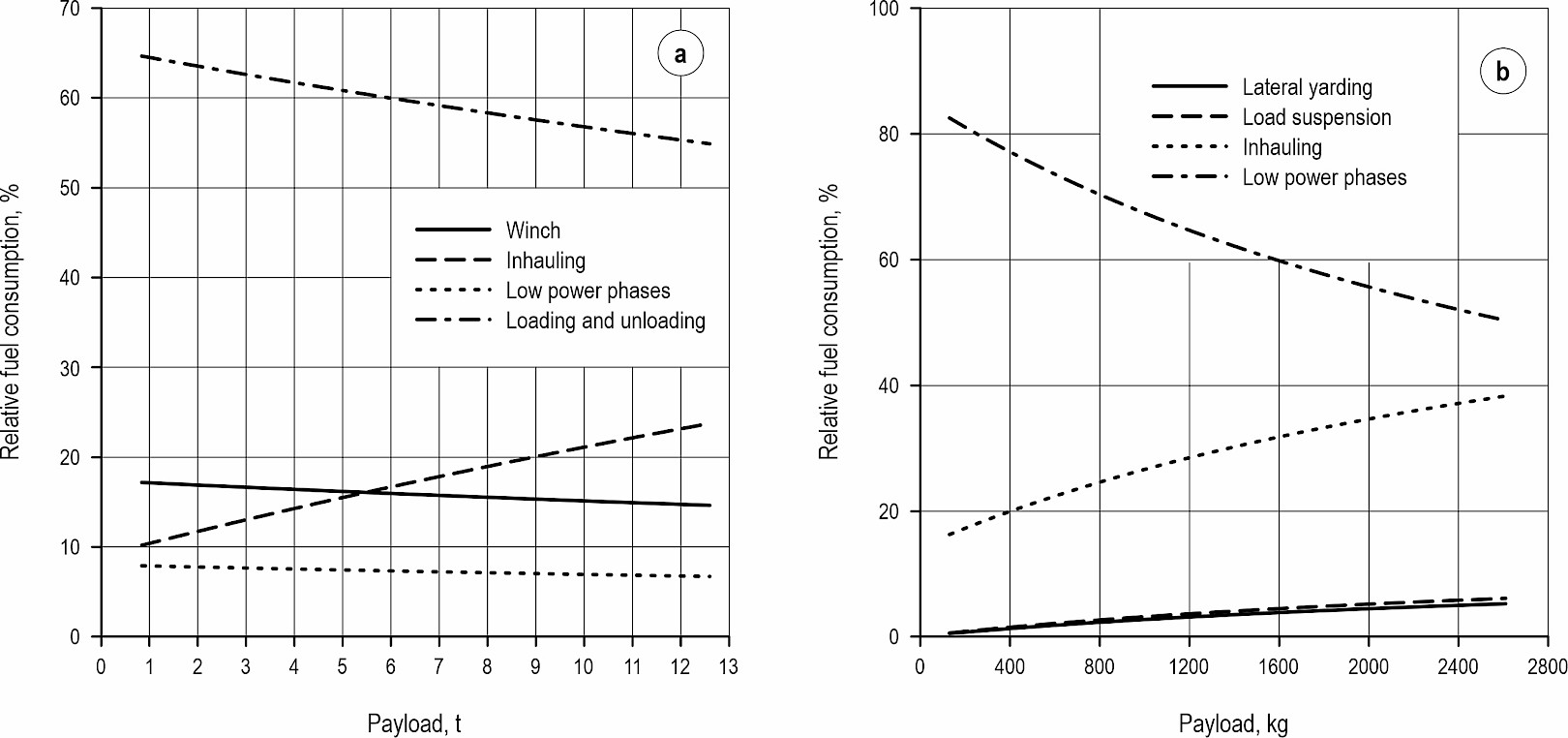
Fig. 6 Fuel consumption breakdown as a function of payload mass for forwarder extraction (a) and cable extraction (b)
4. Discussion
The data and models presented in the materials and methods section clearly describe all the information and equations used for estimating energy consumption. Small simplifications have been made to make the data comparable and usable. The quality of the results heavily depends on the quality of the input assumptions, and that is why we have adopted real-life figures obtained from scientific studies (Holzfeind et al. 2018, Varch et al. 2021). Our estimates were confirmed by a recent study by Hoenigsberger et al. (2024). Furthermore, they are consistent with the findings of other studies on yarding (Ghaffariyan et al. 2018, Spinelli et al. 2022) and forwarding (Manner et al. 2020, Nordfjell et al. 2003, Pandur et al. 2019).
The main merit of this study is to point at the primary source of inefficiency in yarding and forwarding, which is unexpected. Cable yarding was expected to be more energy-efficient than forwarding because of its higher payload-to-tare ratio, estimated at 1.7 versus 0.5 for the forwarder. Both those assumptions turned out to be true, that is cable yarding offers higher energy-efficiency and better payload-to-tare ratio. However, the two are not as closely related as one would think, as the study also indicated that the better payload-to-tare ratio was not the main reason for the higher efficiency of the cable yarder. In fact, the main advantage of the cable yarder was the shorter travel path during loading, performed according to a more linear loading procedure, which consisted in pulling the load under the carriage and lifting it off, rather than lifting the boom and the payload above the bolsters, then bringing them down to the loading bay, and up and down again to reach the next load on the ground, with the heavy cantilever boom continuously in motion. Such complex and iterative mechanical task incurs significant energy consumption and is the primary cause for the lower energy efficiency of forwarder extraction. Like a forwarder, a yarder carriage is designed to move a load on wheels, thus turning sliding friction into rolling friction, to the benefit of higher efficiency. However, the yarder carriage is turned upside down, because it is running along a skyline and suspended under it, rather than over a trail. That makes loading simpler and much more efficient. All the above does not deny the importance of tare weight, but just points to the fact that its effect concerns environmental efficiency (e.g. soil impacts) more than energy efficiency (Pandur et al. 2022).
A promising and increasingly popular approach to increase energy efficiency is hybridization and electrification. This is due to the generally high efficiency of electric components, the possibility of energy recovery and the decoupling of the engine from the transmission, which leads to substantial engine downscaling potential (Leitner et al. 2023). Cable extraction can benefit greatly from yarder electrification, as has been confirmed by Cadei et al. (2021), who examined the hybrid yarder K507e-H developed by Koller Forsttechnik. In an electrified yarder, all active work phases (such as outhauling, lateral yarding, payload suspension and inhauling) can run more efficiently with modern rotary electric drives. In addition, standstill phases require no energy at all. The situation appears not quite as promising for forwarder extraction. The energy-hungry loading and unloading process employs linear drives (hydraulic cylinders), which cannot be easily electrified in a robust and cost-effective way. Energy recycling hydraulic lift cylinders could possibly be employed to recover and recycle part of the energy when lowering the boom directly within the hydraulic circuit, with the potential of up to 11.4% in energy savings (Manner et al. 2016). Forwarder traction and the winch could be fully electrified with modern rotary electric drives, but based on the results of this study, this would only have a marginal effect on overall energy consumption. It would be necessary to fully electrify all forwarder functions to try and offset the handicap of high consumption incurred by boom loading and unloading.
While traction-assisted forwarders are less energy-efficient than cable yarders, they offer better convenience of adapting an existing technology, compared with replacing it with a different one. Ground-based technology is prevalent almost everywhere in the world, and when it comes to tackling steep terrain, it is easier to expand the capacity of the existing technology than shift to a new one, which would require new investments in equipment and workforce training. With an additional investment in the range of 100,000 €, forwarder owners can equip their machines for steep terrain, with minimum requirements for drivers’ retraining. In contrast, changing to a cable yarder will require at least three times the same investment, and a much intensive training effort. In fact, operator training is the main issue; even on the most challenging terrain, cable yarding can be competitive only if it is managed by skilled workers, able to properly identify the most suitable corridors, to quickly set up the yarder and to run it smoothly (Aalmo-Ottaviani and Talbot 2014). The availability of specialist operators makes all the difference; if that is secured, then yarding becomes a tough competitor. Therefore, while it makes sense for ground-based operators to expand the capacity of their fleet by adopting traction-assisted technology, it makes much less sense for the specialized yarder operators to swap their cable yarders for traction-assisted forwarders.
This study also highlights the importance of time and motion studies, which are an effective solution for estimating the incidence of different work tasks on total cycle time (Spinelli et al. 2013). Since energy consumption is closely associated with task type, an accurate assessment of task duration is crucial for achieving a correct estimate of energy use. Time studies are used most often for estimating productivity (Košir et al. 2015), but that is probably not what they are best at, since productivity can be estimated as reliably in many other ways. In contrast, they are ideally suited for determining cycle time distribution, and that can be a very valuable service.
Of course, the comparison presented in this paper reflects specific work conditions, which may strongly affect the results. This study considered uphill extraction only, since solid input data were specifically available for that case. It would be very useful to repeat the exercise for downhill extraction, possibly including an option for electrification and energy recuperation. That whould offer significant benefits especially with downhill extraction, when the extracted loads release potential energy.
5. Conclusions
This study provides the first theoretical analysis and even comparison of the fuel consumption of cable yarding and traction-assisted forwarding for a range of different transport conditions in uphill extraction. It also provides insights into the consumption of individual work phases of both extraction systems. Cable yarding was shown to consume on average 69% less fuel under the same conditions. Standstill and low power operations are responsible for a significant portion of the fuel consumption in cable yarding, which is explained by the comparably long duration of these phases (tl + tr) compared to a brief high-power inhauling phase, especially when the extraction distance (D) is small. Since the energy consumption for inhauling is modeled as the change of potential energy of all masses involved and not as a function of inhauling time or speed, this result presents itself implicitly. In forwarder operations, the loading and unloading process is a significant energy sink. Cable yarding appears to offer more potential to boost the operational efficiency, especially by increasing its payload and via hybridizing or electrifying its drivetrain. Future work will focus on extending this work to downhill extraction and electrified yarders and forwarders. The results of this study can be used by practitioners to develop best practice guidelines for steep terrain operations, and by machine manufacturers to design better and more efficient forwarders and cable yarders.
Acknowledgements
This study was carried out within the Agritech National Research Center and received funding from the European Union Next-GenerationEU (PIANO NAZIONALE DI RIPRESA E RESILIENZA (PNRR) – MISSIONE 4 COMPONENTE 2, INVESTIMENTO 1.4 – D.D. 1032 17/06/2022, CN00000022). This manuscript reflects only the authors’ views and opinions, neither the European Union nor the European Commission can be considered responsible for them.
6. References
Aalmo-Ottaviani, G., Talbot, B., 2014: Operator performance improvement through training in a controlled cable yarding study. Int. J. For. Eng. 25(1): 5–13. https://doi.org/10.1080/14942119.2014.904150
ASABE Standards, 2012: ASAE S296.5 General Terminology for Traction of Agricultural Tractors and Machinery. St. Joseph, MI: American Society of Agricultural and Biological Engineers.
Bombosch, F., Sohns, D., Nollau, R., Kanzler, H., 2003: Are forest operations on steep terrain (average of 70% slope inclination) with wheel mounted forwarders without slippage possible? Proceedings of Austro 2003 – High Tech Forest Operations for Mountainous Terrain, October 5–9, Schlaegl, Austria, University of Natural Resources and Applied Life Sciences Viena.
Cadei, A., Mologni, O., Marchi, L., Sforza, F., Röser, D., Cavalli, R., Grigolato, S., 2021: Energy efficiency of a hybrid cable yarding system: a case study in the North-Eastern Italian Alps under real working conditions. J. Agric. Eng. 52(3): 1185. https://doi.org/10.4081/jae.2021.1185
Felt, M., 2002: Gyppo Logger. University of Washington Press, Seattle, WA, USA, 1–328.
Gao, C., Hartsough, B., 1988: Concepts for harvesting timber on steep terrain. Trans. ASAE 31(2): 362–368.
Ghaffariyan, M., Apolit, R., Kuehmaier, M., 2018: A short review of fuel consumption rates of whole tree and cut-to-length timber harvesting methods. Curr. Inves. Agri. Curr. Res. 5(2): 603–606. https://doi.org/10.32474/CIACR.2018.05.000209
Hemphill, D., 1991: Feller-buncher applications on cable terrain. Technical Release – Logging Industry Research Association 13(4): 1–5.
Holzfeind, T., Stampfer, K., Holzleitner, F., 2018: Productivity, setup time and costs of a winch-assisted forwarder. J. For. Res. 23(4): 196–203. https://doi.org/10.1080/13416979.2018.1483131
Holzfeind, T., Kanzian, C., Stampfer, K., Holzleitner, F., 2019: Assessing cable tensile forces and machine tilt of winch-assisted forwarders on steep terrain under real working conditions. Croat. J. For. Eng. 40(2): 281–296. https://doi.org/10.5552/crojfe.2019.621
Holzfeind, T., Visser, R., Chung, W., Holzleitner, F., Erber, G., 2020: Development and benefits of winch-assist harvesting. Curr. For. Rep. 6: 201–209. https://doi.org/10.1007/s40725-020-00121-8
Hönigsberger, F., Fuchs, L., Wedam, L., Holzfeind, T., Kanzian, C., Gollob, C., Stampfer, K., 2024: Comparing fuel consumption during timber forwarding with and without traction-assist winch. Proceedings of the 56th International Symposium on Forest Mechanization (FORMEC) – Timber harvesting: the reality of offsetting the needs of industry against those of the environment, June 11–14, Gdańsk, Poland, 1–13.
IOR energy, 2024: Engineering Conversion Factors. Visited on August 4th, 2024 https://web.archive.org/web/20100825042309/http://www.ior.com.au/ecflist.html
Jackson, D., 2022: The American Automobile Industry in World War Two – an Overview. Published on-line https://usautoindustryworldwartwo.com/ Consulted August 8th, 2024.
Košir, B., Magagnotti, N., Spinelli, R., 2015: The role of work studies in forest engineering: status and perspectives. Int. J. For. Eng. 26(3): 160–170. https://doi.org/10.1080/14942119.2015.1111043
Leitner, S., Perez Estevez, M., Renzi, M., Spinelli, R., Mazzetto, F., Vidoni, M., 2023: Tower yarder powertrain performance simulation analysis: electrification study. Eur. J. For. Res. 142(1): 739–761. https://doi.org/10.1007/s10342-023-01553-0
Manner, J., Nordfjell, T., Lindroos, O., 2016: Automatic load level follow-up of forwarders’ fuel and time consumption. Int. J. For. Eng. 27(3): 151–160. https://doi.org/10.1080/14942119.2016.1231484
Manner, J., Lindroos, O., Arvidsson, H., Nordfjell, T., 2016: Evaluation of a New Energy Recycling Hydraulic Lift Cylinder for Forwarders. Croat. J. For. Eng. 37(2): 219–231.
Manner, J., Berg, S., Ersson, B., 2020: Forwarding during final felling: work element-specific distributions of driving distances at the stand level. Int. J. For. Eng. 31(1): 51–69. https://doi.org/10.1080/14942119.2019.1657058
McKenzie, D., Richardson, B., 1978: Feasibility study of self-contained tether cable system for operating on slopes of 20 to 75%. J. Terramech. 15(3): 113–127. https://doi.org/10.1016/0022-4898(78)90015-0
Nordfjell, T., Athanassiadis, D., Talbot, B., 2003: Fuel consumption in forwarders. Int. J. For. Eng. 14(2): 11–20. https://doi.org/10.1080/14942119.2003.10702474
Oh, J., Cha, D., 2001: A Study on tractive resistance prediction of logging machine. J. For. Sci. 17(1): 62–73.
Pandur, Z., Šušnjar, M., Bačić, M., Đuka, A., Lepoglavec, K., Nevečerel, H., 2019: Fuel consumption comparison of two forwarders in lowland forests of pedunculate oak. iForest 12(1): 125–131. https://doi.org/10.3832/ifor2872-011
Pandur, Z., Kopseak, H., Šušnjar, M., Landekić, M., Šporčić, M., Bačić, M., 2022: Effect of forwarder multipassing on forest soil parameters changes. iForest 15(6): 476-483. https://doi.org/10.3832/ifor4138-015
Raymond, K., 2018: PGP Steepland Harvesting – A collaborative research and development programme. N. Z. J. Forest. 63(3): 18–21.
Spinelli, R., Laina-Relańo, R., Magagnotti, N., Tolosana, E., 2013: Determining observer and method effects on te accuracy of elemental time studies in forest operations. Baltic For. 19(2): 301–306.
Spinelli, R., Magagnotti, N., Cosola, G., Engler, B., Leitner, S., Vidoni, R., 2022: Fuel and Time Consumption in Alpine Cable Yarder Operations. Forests 13(9): 1394. https://doi.org/10.3390/f13091394
Varch, T., Erber, G., Spinelli, R., Magagnotti, N., Stampfer, K., 2021: Productivity, fuel consumption and cost in whole tree cable yarding: conventional diesel carriage versus electrical energy-recuperating carriage. Int. J. For. Eng. 32(1): 20–30. https://doi.org/10.1080/14942119.2020.1848178
Visser, R., Stampfer, K., 2015: Expanding Ground-based Harvesting onto Steep Terrain: A Review. Croat. J. For. Eng. 36(2): 321–331.
© 2026 by the authors. Submitted for possible open access publication under the
terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Authors’ addresses:
Stefan Leitner, PhD
e-mail: stelei.bz@gmail.com
Prof. Renato Vidoni, PhD
e-mail: renato.vidoni@unibz.it
Free University of Bolzano
Faculty of Engineering
Piazza Università 1
39100 Bolzano
ITALY
Raffaele Spinelli, PhD *
e-mail: raffaele.spinelli@ibe.cnr.it
National Research Council
Institute of Bioeconomy
Via Madonna del Piano 10
59100 Sesto Fiorentino
ITALY
* Corresponding author
Received: February 15, 2025
Accepted: August 04, 2025
Original scientific paper