
Path Explorer – an AI-Driven Corridor Planning System for Forest Road Routing: A Case Study in Bosnia and Herzegovina
doi: https://doi.org/10.5552/crojfe.2026.4532
volume: issue, issue:
pp: 13
- Author(s):
-
- Petković Vladimir
- Ćetković Goran
- Marčeta Dane
- Ljubojević Darko
- Sukur Milan
- Article category:
- Original scientific paper
- Keywords:
- AI-driven corridor, digital terrain model (DTM), forest road design, RoadEng
Abstract
HTML
Forest road planning is a key component of sustainable forest management, as it ensures access to harvesting, transport, and protection activities while minimizing environmental impacts. Recent advances in digital terrain models (DTMs) and automated design tools have opened new possibilities for improving the efficiency of road alignment planning. This study evaluates the potential of an AI-driven corridor planning system (Path Explorer) integrated into RoadEng software compared with the traditional zero-line method in designing the forest road »Osmača–Compartment 56« in Bosnia and Herzegovina. Two DTMs with resolutions of 20×20 m and 90×90 m were used to generate alternative alignments, which were then refined in the Location module to produce preliminary projects and compared with the operational (field-designed) alignment. The results indicate that AI-driven preliminary designs achieved shorter alignments and lower estimated construction costs and earthwork volumes, suggesting potential cost savings under the tested conditions. The operational design, based on field measurements, remained the most accurate and suitable for final implementation in complex terrain. The study emphasizes that these conclusions are limited to the tested DTM resolutions and the specific case study area. Nevertheless, the integration of AI-driven corridor planning systems into early design phases can enhance the efficiency and objectivity of forest road planning, supporting more informed and sustainable engineering decisions.
Path Explorer – an AI-Driven Corridor Planning System for Forest Road Routing: A Case Study in Bosnia and Herzegovina
Vladimir Petković, Goran Ćetković, Dane Marčeta, Darko Ljubojević, Milan Sukur
https://doi.org/10.5552/crojfe.2026.4532
Abstract
Forest road planning is a key component of sustainable forest management, as it ensures access to harvesting, transport, and protection activities while minimizing environmental impacts. Recent advances in digital terrain models (DTMs) and automated design tools have opened new possibilities for improving the efficiency of road alignment planning. This study evaluates the potential of an AI-driven corridor planning system (Path Explorer) integrated into RoadEng software compared with the traditional zero-line method in designing the forest road »Osmača–Compartment 56« in Bosnia and Herzegovina. Two DTMs with resolutions of 20×20 m and 90×90 m were used to generate alternative alignments, which were then refined in the Location module to produce preliminary projects and compared with the operational (field-designed) alignment. The results indicate that AI-driven preliminary designs achieved shorter alignments and lower estimated construction costs and earthwork volumes, suggesting potential cost savings under the tested conditions. The operational design, based on field measurements, remained the most accurate and suitable for final implementation in complex terrain. The study emphasizes that these conclusions are limited to the tested DTM resolutions and the specific case study area. Nevertheless, the integration of AI-driven corridor planning systems into early design phases can enhance the efficiency and objectivity of forest road planning, supporting more informed and sustainable engineering decisions.
Keywords: AI-driven corridor, digital terrain model (DTM), forest road design, RoadEng
1. Introduction
Forest road planning has long been recognized as a fundamental element of sustainable forest management, ensuring access to harvesting, transportation, fire prevention, pest control, and recreation, while at the same time minimizing ecological impacts (Sessions 2007, Begus and Pertlik 2017). Optimal density of forest road infrastructure is one of the fundamental preconditions for modern, high-quality, integrated, and rational forest ecosystem management (Bajrić et al. 2022). Traditional approaches relied heavily on field-based surveying, particularly the establishment of the so-called zero line, where the optimal alignment was approximated using dividers and clinometers on topographic maps (Stückelberger et al. 2006). Although such approaches remain important in practice, the increasing accuracy of digital terrain models (DTMs) and the availability of specialized design software have significantly transformed forest road design. Tools such as RoadEng, especially its Terrain and Location modules, have been widely adopted for their capacity to handle geometric design, earthwork calculations, and drainage structures.
The early formalization of forest road routing problems treated network design as a combined optimization task on graphs, balancing construction and skidding costs. Chung et al. (2008) proposed a heuristic network approach that explicitly evaluated trade-offs between road opening and skidding costs, offering a practical balance between road density and operational expenses. In parallel, GIS-based least-cost path (LCP) and multi-criteria decision-making methods, such as Analytical Hierarchy Process (AHP) combined with ecological constraint layers, became standard tools for preliminary road planning, as shown in Tuscany and other mountainous regions (Picchio et al. 2018). Reviews of Kazama et al. (2021) highlight that forest road network optimization has gradually evolved from deterministic methods toward heuristics and metaheuristics capable of incorporating terrain and environmental constraints more effectively. Forest road alignment research evolved from GIS-LCP methods to advanced metaheuristics, according to Meignan et al. (2012) applying a GRASP heuristic to the P-forest problem, while genetic algorithms and swarm intelligence further addressed multi-objective constraints, paving the way for today’s AI-driven models.
Applications of machine learning to subproblems within forest road design emerged soon after. Ghajar et al. (2012) applied an Adaptive Neuro-Fuzzy Inference System (ANFIS) to predict rock share along planned routes. More recently, supervised machine learning (ML) models have been employed to model construction and maintenance costs as functions of morphometry, geology, and hydrology (Jaafari et al. 2021). This development parallels AI-derived generative routing, where ML-derived parameters serve as inputs for optimization algorithms.
A growing body of contemporary research focuses on deep learning (DL) for forest road detection, mapping, and inspection, all of which are essential for validating AI-driven alignments. Convolutional neural networks trained on multisensor satellite and LiDAR data have successfully extracted road segments beneath canopy cover (Buján et al. 2021, Lee et al. 2024, Winiwarter et al. 2024). These methods enable automated updates of forest road inventories and generate accurate base layers for AI-driven planning. Complementary approaches have applied DL methods to detect wheel ruts and soil damage from UAV imagery (Bhatnagar et al. 2022). Collectively, these studies not only support the development of AI-driven planning systems but also provide independent validation of alignment feasibility and sustainability.
The accuracy of DTMs remains a decisive factor for alignment quality. Coarse DTMs (30–90 m) tend to smooth microrelief, resulting in alignments that appear less costly but entail higher construction risks, whereas LiDAR-based DTMs with sub-meter resolution yield more realistic estimates of earthwork requirements (Kardoš et al. 2024, Zhou et al. 2025). Hrůza et al. (2025) stated that UAV-based models reached an average deviation as low as 0.06 m. This evidence supports findings that coarse DTMs reduce apparent costs while underrepresenting terrain challenges. Consequently, the literature recommends high-resolution LiDAR or photogrammetry-based DTMs (RMSE≤0.06 m), with mobile and airborne LiDAR increasingly used for detailed design and inspection. Geospatial information systems (GIS) remain essential for forest road planning, enabling cost-effective corridor identification that balances terrain, environmental, and operational constraints (Abdi et al. 2009, Acosta et al. 2023, Morais et al. 2023). Advanced modeling approaches integrate GIS with AI optimization techniques such as genetic algorithms and particle swarm optimization to generate cost-efficient and environmentally balanced forest road networks under multiple design constraints (Babapour et al. 2018, Kim et al. 2022, Hardy et al. 2023).
At the network scale, novel approaches integrate graph-theoretic models and GIS-calibrated costs to stage road construction under sustainability constraints (Kaneko et al. 2024), while others apply topological metrics to evaluate connectivity and critical junctions in road networks (Norouzi Sangtabi et al. 2025). AI-driven methods have improved GIS applications for forest road mapping and monitoring. LiDAR-derived DTMs combined with machine learning classifiers achieved sub-meter accuracy even under canopy cover (Azizi et al. 2014). High-density airborne LiDAR and deep learning models such as U-Net further enhanced the detection of narrow road features (McDermid et al. 2025), while vision-based systems using dashcams and smartphones proved effective for detecting surface defects (Hoseini et al. 2024). However, data quality still limits integration. GNSS/RTK, UAV, and LiDAR surveys provide centimeter-to-decimeter accuracy, yet canopy density and slope strongly affect the results (Lovrinčević et al. 2025). Errors from DEM resolution and interpolation can propagate into alignment and cost estimates, underscoring the need for careful data validation (Matinnia et al. 2018). The recent conceptual evolution from Industry 5.0 to Forestry 5.0 emphasizes the integration of Human-Centered Artificial Intelligence, where AI technologies are designed to augment rather than replace human expertise in forest operations, promoting safety, transparency, and sustainability in decision-making (Holzinger et al. 2024).
While numerous studies have explored road alignment optimization using heuristic, metaheuristic, and GIS-based algorithms, most of these approaches have been tested in experimental or simulated settings rather than in integrated engineering environments. In contrast, the present study applies an AI-driven corridor planning system (Path Explorer) embedded within the RoadEng software to evaluate its practical applicability in a real forest management context in Bosnia and Herzegovina. Previous research has typically focused on theoretical optimization or on isolated aspects such as cost modeling and terrain analysis, while few studies have directly compared automatically generated alignments with field-designed operational projects under identical design parameters. This study therefore aims to bridge that gap by providing an applied assessment of how automated, AI-driven alignment generation performs relative to traditional field-based methods within the same design framework. The main aim of this research is to evaluate the applicability and performance of an AI-driven corridor planning system (Path Explorer) compared with the traditional zero-line method in the context of forest road design. Specifically, the study seeks to:
- assess how digital terrain model (DTM) resolution (20×20 m and 90×90 m) influences road length, earthwork volume, and construction cost
- compare AI-driven preliminary designs with the field-designed operational alignment in terms of geometric quality and construction parameters
- analyze the potential of automated alignment tools to support early-stage decision making in forest road planning.
To achieve these objectives, the research integrates DTM-based corridor generation using Path Explorer in the Terrain module and detailed design refinement in the Location module of RoadEng, followed by a comparative analysis of earthwork, costs, and geometric indicators between preliminary (AI-driven) and operational (field-designed) projects. The expected contribution of this study is twofold: from a practical perspective, it demonstrates a workflow capable of reducing design time and preliminary costs in mountainous terrain, while from a scientific perspective, it provides quantitative evidence on how DTM resolution and automated corridor generation influence design accuracy and cost-efficiency. The results aim to support the integration of AI-driven tools into standard forest engineering practice, contributing to more data-informed and sustainable road planning processes.
2. Material and Methods
2.1 Research Object
The subject of this research is the forest road »Osmača–Compartment 56« with a planned total length of 1.7 km. The road is designed to provide access to Compartments 55/1 and 55/2, as specified in the investment activities of the Forest Management Plan (FMP). It branches off from the existing forest road »Osmača–Tisovac« and terminates at the boundary of Compartment 56.
The road is located within the Forest Management Unit (FMU) »Osmača«, which covers a total area of 1338.22 ha. This FMU belongs to the Forest Management Area (FMA) »Čemernica« situated in the municipality of Kneževo, Bosnia and Herzegovina, and is managed by the Forest Administration (FA) »Čemernica« under the Public Forest Company (PFC) »Forests of Republic of Srpska« Ltd (Fig. 1).
The bio-ecological characteristics of the research area are dominated by high secondary beech forests regenerated naturally, interspersed with mixed stands of beech, fir, and spruce, growing on predominantly deep limestone soils. Beech is the prevailing species, while noble and other broadleaf species are less represented. The average stand density in the targeted compartments is 77%, classified as an open canopy. The total growing stock in the FMU amounts to 279,557 m³, of which 11,678 m³ is coniferous and 250,353 m³ broadleaved wood. The average annual volume increment is 5.6 m³/ha. The geological substrate of the FMU consists of massive Lower Cretaceous limestones, characterized by karst hydrology, which has resulted in the formation of sinkholes, limestone pavements, and extensive surface rockiness in some areas (IRPC 2017).
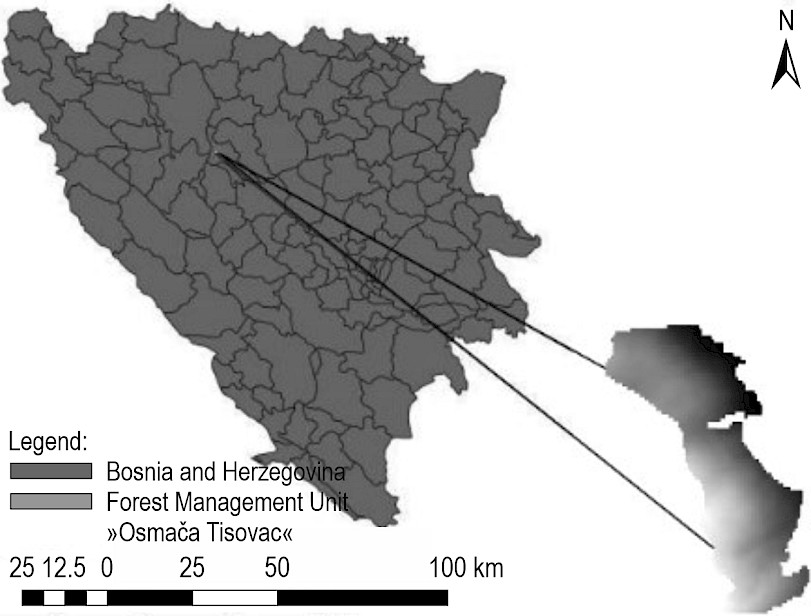
Fig. 1 Location of Kneževo Municipality and FMU »Osmača« in B&H
The predominant soil type in the study area is distric cambisol. The soil depth generally ranges from 5 to 10 cm, increasing to about 30–40 cm in sinkholes. Surface rock outcrops are clearly visible throughout the area. The humus layer averages 2 cm in thickness, followed by approximately 10 cm of mineral soil and around 7 cm of fractured rock. The soil corresponds to brown cambic soils that provide limited conditions for plant growth due to their low nutrient content. Formed on quartz-silicate substrates with a low proportion of basic cations, these soils are typical of hilly and mountainous terrain. In constructive terms, the terrain is classified as category IV (IRPC 2017).
2.2 Methods
The operational design of the same road will be developed from data collected directly in the field, which will subsequently be processed and analyzed in RoadEng (Fig. 2). In forest road engineering practice, the zero line represents a preliminary field alignment established directly on the terrain using traditional surveying instruments, serving as the reference trace from which the final road geometry is developed and forming the basis for operational design. The zero line is the filed-based grade control line.
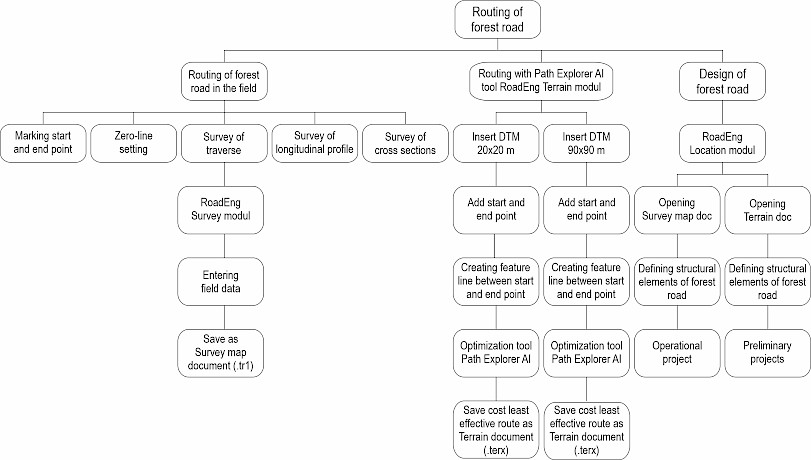
Fig. 2 Research workflow
The preliminary design of the forest road will be generated through the Path Explorer AI-driven tool within RoadEng based on digital terrain model (DTM) and start A and end point B of the operational project (Fig. 3), providing an alternative approach. The DTMs will be obtained from the open GIS data source website USGS, with resolutions of 90×90 m and DTM with resolutions of 20×20 m from an unspecified source, representing medium and high-resolution models (Gigović 2010). The DTM of the FMU will be clipped using the QGIS Vector tool »Clip by Mask Layer«, while interpolation will be performed with the »Raster, Projection, Warp (Reproject« method.
Path Explorer is an AI-driven corridor planning system that automatically generates and ranks alternative road alignments under user-defined geometric, environmental, and cost constraints. The outputs from Path Explorer will serve as a basis for further refinement and detailed road geometry design in the RoadEng Location module. The design process will begin with the preparation of spatial data (start and end points, DTMs/TINs), enabling terrain analysis and earthwork calculations. Designers will then define constraints and parameters such as road width, minimum curve radius, maximum and minimum grades, slope ratios for cut and fill, and unit costs for excavation, embankment, and surfacing. No-go zones or areas of high construction costs can also be specified.
The software generates several alignment alternatives, including the least-cost path and other spatially distinct options within 10% of that cost. Designers then evaluate these routes for feasibility and select the most suitable one for refinement in the RoadEng Location module, where detailed geometry and construction elements are defined. Path Explorer supports the balance between terrain conditions, environmental constraints, and construction costs using defined design parameters, minimum curve radius of 20 m, longitudinal slope from –8% to +8%, and slope ratios of 2:1 for cuts and 1:1.25 for fills, appropriate for terrain category IV (IRPC 2002). Three routing alternatives are produced for comparison. Unit construction costs per meter of road length will include 1.81 USD (3.18 BAM) for excavation, 0.82 USD (1.44 BAM) for embankment construction, and 0.35 USD (0.61 BAM) for surfacing (IRPC 2023). These parameters will provide the basis for alignment decisions in the design phase and will ensure cost optimization while maintaining functionality in accordance with technical and environmental standards.
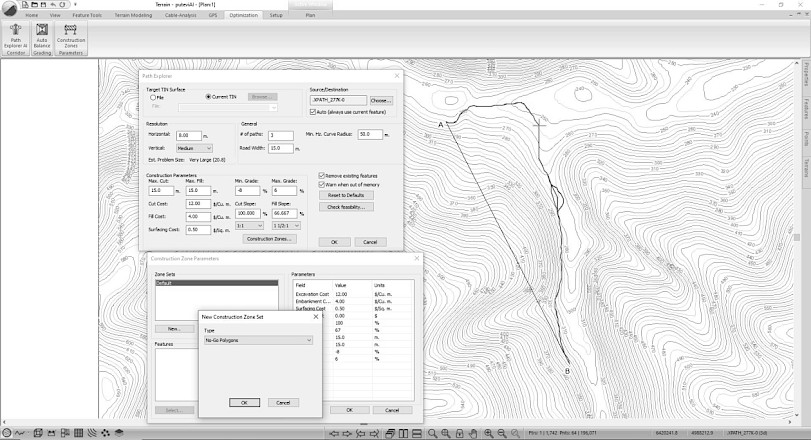
Fig. 3 Path Explorer AI environment
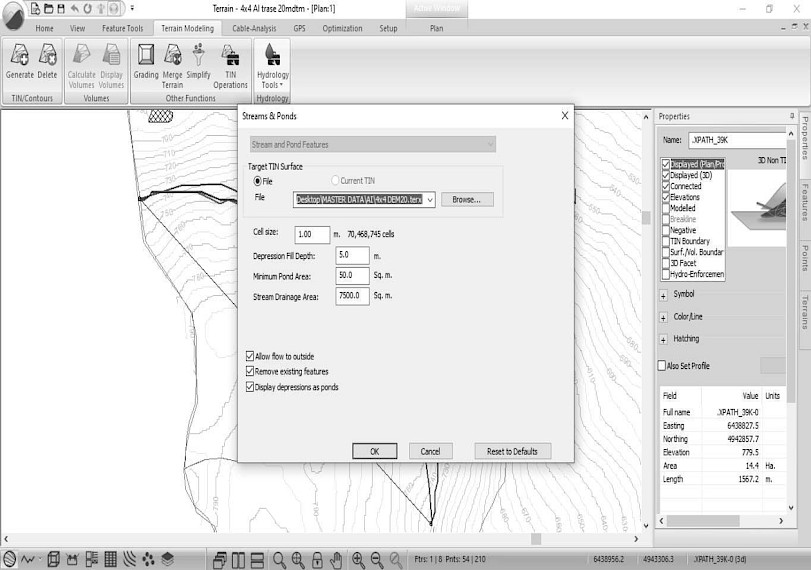
Fig. 4 Streams and Ponds
In the design process, »Construction Zones« will be defined to exclude sensitive areas such as sinkholes (Fig. 3), while »Hydrology Tools« will delineate streams and water accumulation zones (Fig. 4). From the three generated alternatives, the least expensive AI-based route will be selected and saved in .terx format for comparison with the field-designed zero line. The operational project will establish the zero line through grade measurements, traverses, and curve calculations, followed by recording longitudinal profiles and cross-sections. All collected data will then be processed in the RoadEng Survey module (Fig. 5) and exported for detailed design.
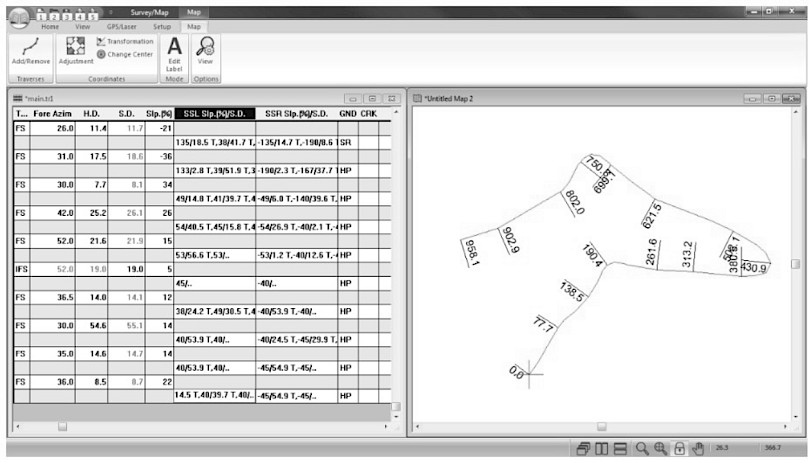
Fig. 5 Survey/Map module
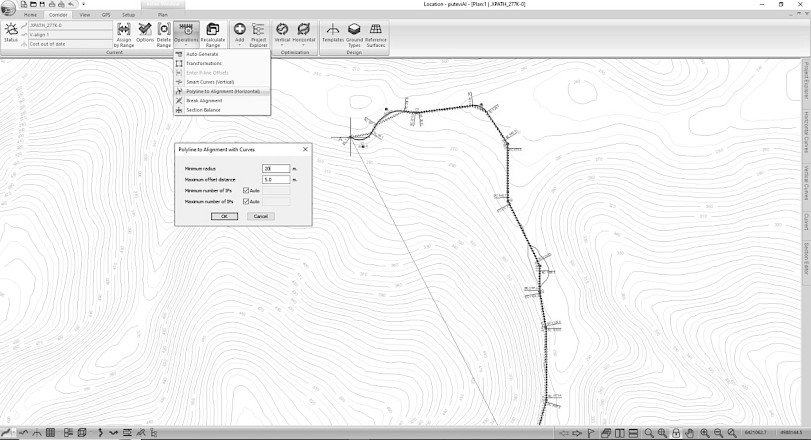
Fig. 6 The definition of road structural elements in plain view
The least expensive Path Explorer AI-driven routes for DTM 20×20 m and DTM 90×90 m (.terx format), together with the field-based design (.tr1 file), were imported into the RoadEng Location module. In accordance with the »Manual for Forest Road Design in Republic of Srpska« (IRPC 2002), the constructive elements of the road were then defined in plan, profile, and cross-section views. The objective was to produce the operational project from field data and preliminary projects from AI-driven alignments. In the plan view, the definition of constructive elements began with setting horizontal curves, ensuring a minimum radius of 20 m. The »Location module« corrected both the field and AI-driven zero-lines to establish the optimal number of curves (Fig. 6). For the longitudinal profile, the »Vertical Optimization Options« were applied, setting limits for road grade and curve radii based on the national design manual (Fig. 7). Cross-sectional elements were defined using the »Low Resource Template«, specifying a 4 m road width (3 m carriageway and two 0.5 m shoulders), cut slope of 2:1 (200%), fill slope of 1:1.25 (80%), and a ditch 0.5 m wide and 0.2 m deep, with a 30 cm roadbed layer (Fig. 8).
From these defined elements, the Location module generated data tables detailing earthwork volumes and material requirements for construction, including excavation, embankment, and surfacing quantities. Comparative analysis of the obtained routes for the forest road »Osmača – Compartment 56« was then carried out using basic statistical indicators.
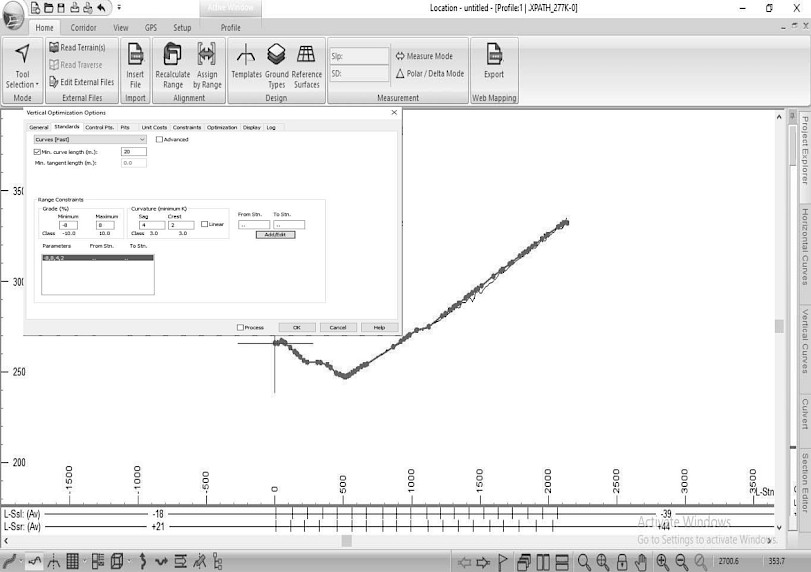
Fig. 7 The definition of structural elements of forest road in longitudinal profile
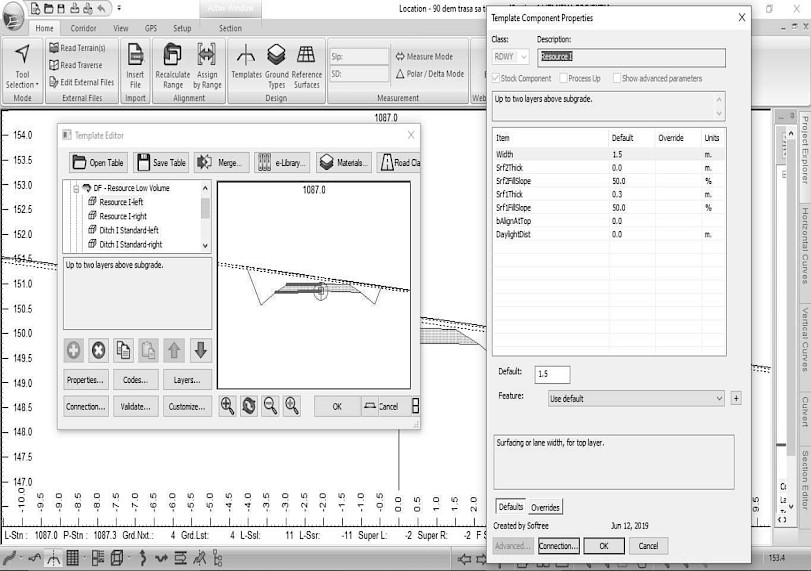
Fig. 8 Low Resource volume Template cross section tool
3. Results and Discussion
The results are presented in two parts. The first part describes the AI-driven routes automatically generated by the Path Explorer tool within the Terrain module, representing preliminary corridor alternatives prior to detailed design. The second part presents the Operational project (field-designed zero-line) and the Preliminary projects derived from the selected AI routes after refinement in the Location module, where full geometric definition and earthwork calculations were performed. This distinction allows for consistent comparison between automatically generated corridors and finalized designs. Through spatial analysis of the digital terrain model using QGIS, it was determined that the elevation of the area ranges from 386 to 1158 m above sea level, and the slope of the terrain ranges from 0 to 52%. Such relief and slope heterogeneity are typical of mountainous forest contexts, where routing must balance geometric feasibility with earthwork and environmental exposure, as similarly noted for Italian mountain settings using GIS-supported workflows (Picchio et al. 2018) and in broader reviews of road planning under complex terrain (Kazama et al. 2021).
3.1 AI-Driven Routes (Terrain Module)
In the Terrain module, Path Explorer generated three alternative AI-driven routes for each DTM resolution (20×20 m and 90×90 m). These represent preliminary corridor options ranked by estimated construction cost. As shown in Table 1, route lengths ranged from 1316 to 1375 m under the 20×20 m DTM and from 1333 to 1350 m under the 90×90 m DTM, with corresponding cost estimates between 27,000 and 31,000 USD.
Table 1 Path Explorer routes of forest road »Osmača-Compartment 56« designed in Terrain module
|
Digital terrain model |
Path Explorer route 1 |
Path Explorer route 2 |
Path Explorer route 3 |
|||
|
Length, m |
Price, USD |
Length, m |
Price, USD |
Length, m |
Price, USD |
|
|
DTM 20x20 m (Fig. 14) |
1375.00 |
31,000 |
1329.60 |
30,000 |
1316.10 |
30,000 |
|
DTM 90x90 m (Fig. 15) |
1349.50 |
28,000 |
1339.80 |
27,000 |
1332.90 |
28,000 |
Path Explorer route 3 consistently proved to be the shortest option, measuring 1316.10 m with the 20×20 m DTM and 1332.90 m with the 90×90 m DTM. In contrast, route 1 was the longest, particularly under the 20×20 m DTM (1375.00 m) (Table 1). The lowest construction cost was recorded for route 2 with the 90×90 m DTM (27,000 USD), while route 1 was generally the most expensive (31,000 USD in the 20×20 m DTM and 28,000 USD in the 90×90 m DTM). This pattern is consistent with studies showing that coarser DEM/DTM resolutions smooth microrelief and can underestimate earthwork complexity, thus yielding alignments that look cheaper on paper but may be riskier in execution (Aruga et al. 2006, Matinnia et al. 2018, Kardoš et al. 2024). Both DTMs revealed similar trends: Path Explorer route 3 remained the shortest and among the most cost-efficient alternatives, while switching from the finer (20×20 m) to the coarser (90×90 m) resolution reduced route lengths and costs across all options (Fig. 9 and 10). Overall, Path Explorer route 3 offered the most balanced solution, combining relatively short length with lower construction costs. Path Explorer route 2 was also competitive, particularly in the 90×90 m DTM, where it achieved the lowest price. By contrast, Path Explorer route 1 consistently resulted in longer and more expensive alignments, making it the least favorable in cost-optimization scenarios. For comparison, the zero-line route designed in the field measured 1307 m, between 10 and 70 m shorter than the Path Explorer alternatives. Related work on terrain-model resolution in other mountainous applications similarly reports that lower-resolution surfaces suppress critical terrain features relevant for hydraulic and mass-movement responses (Zhou et al. 2025), reinforcing our interpretation that coarse DTMs can bias cost expectations.
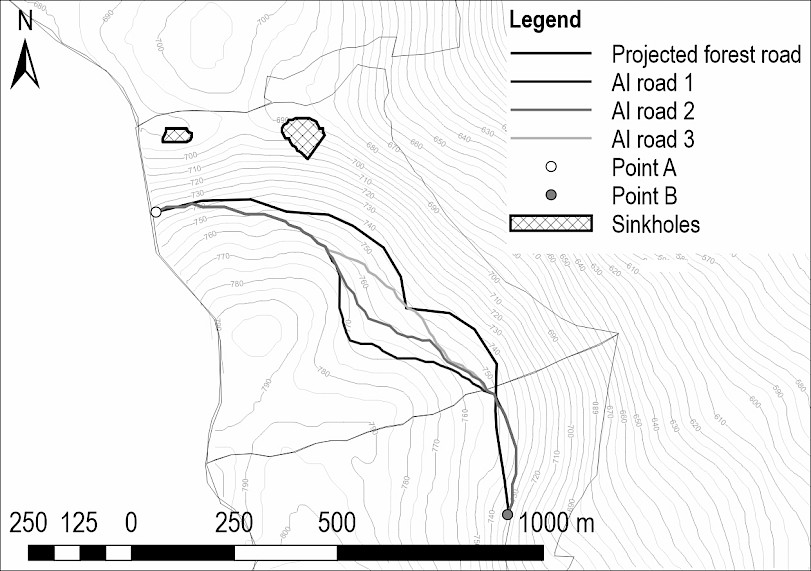
Fig. 9 The routes of forest road DTM20x20m
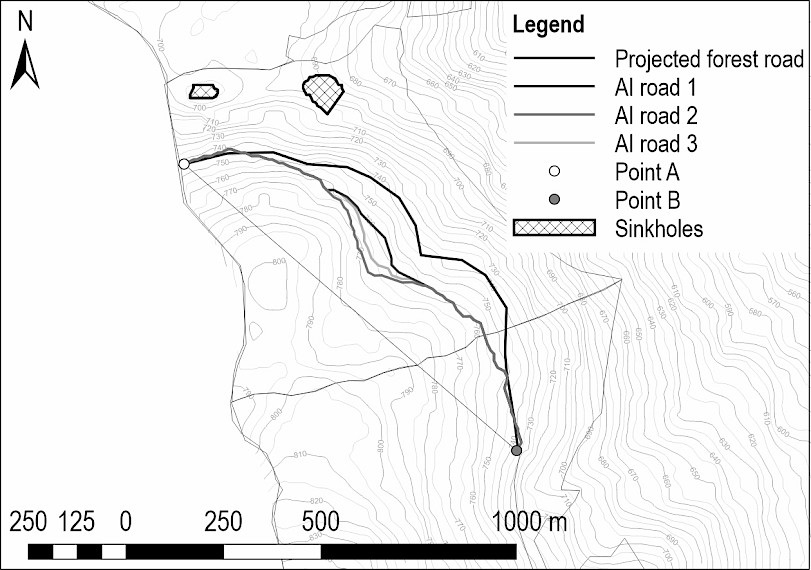
Fig. 10 Routes of forest road DTM90x90m
3.2 Operational and Preliminary Projects (Location Module)
In the Location module, the selected AI routes were transformed into finalized Preliminary projects using the same structural parameters as the Operational project (field-designed alignment). This step enabled a direct comparison of total costs and earthwork volumes between automated and field-based designs (Table 2). The operational and preliminary projects of the forest road »Osmača–Compartment 56«, developed from both the field-designed route (zero-line) and the Path Explorer alignments (automatically generated alternatives) using identical constructive elements in the Location module (Fig. 11 and 12), provide more accurate estimates of construction costs. Each project includes plan, profile, and cross-section views, along with data tables detailing earthwork volumes and associated construction costs. Table 2 presents the main geometric characteristics of these projects, including the number and radii of horizontal and vertical curves as well as the longitudinal grades. The AI-driven preliminary designs generally contain a higher number of horizontal and vertical curves with slightly variable radii, reflecting the automatic corridor optimization process, whereas the operational alignment maintains uniform curve parameters and a somewhat steeper average grade.
Table 2 The constructive elements
|
Projects of forest road |
Radius of horizontal curves, m |
Radius of vertical curves, m |
Grade of longitudinal profile, % |
||||||||
|
N |
Min. |
Max. |
Average |
N |
Min. |
Max. |
Average |
Min. |
Max. |
Average |
|
|
Operational project |
9 |
20 |
20 |
20 |
3 |
200 |
400 |
266.67 |
3 |
8 |
3.63 |
|
Preliminary project DTM 20X20 |
16 |
20 |
32 |
20.75 |
9 |
200 |
1430 |
660 |
-7 |
8 |
3.5 |
|
Preliminary project DTM 90x90 |
19 |
20 |
94 |
26.58 |
8 |
200 |
570 |
410 |
0 |
8 |
3.18 |
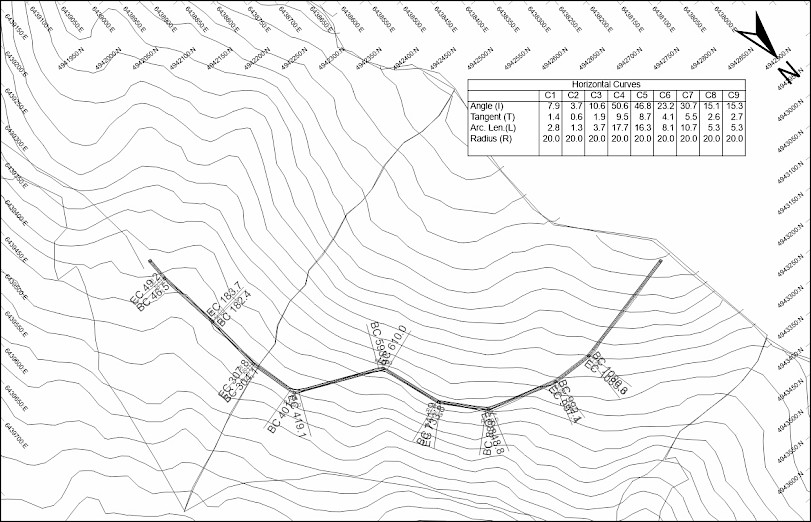
Fig. 11 Example of plan view
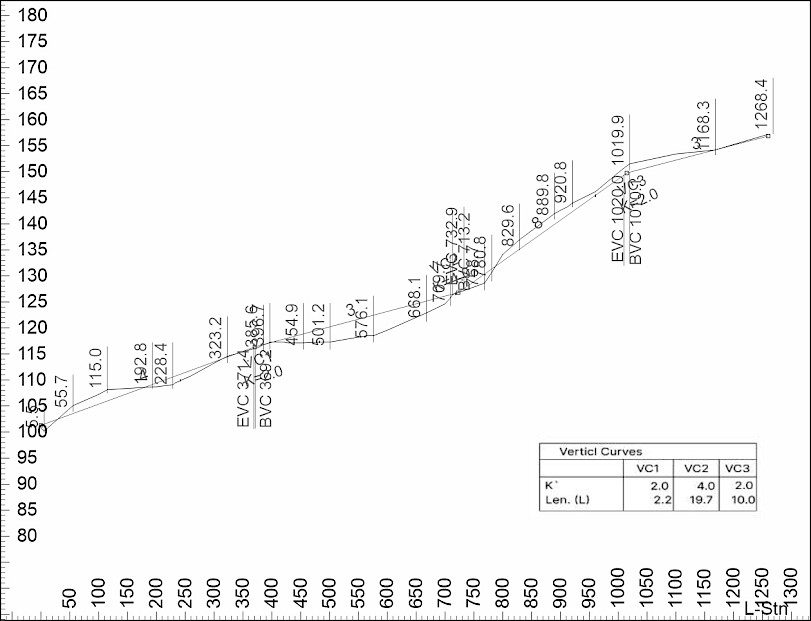
Fig. 12 Example of profile view
Based on the alternative alignments generated in the Terrain module, the most suitable route was selected and refined in the Location module for each digital terrain model. The resulting lengths of the finalized preliminary projects were 1331.20 m for the 20×20 m DTM and 1332.80 m for the 90×90 m DTM. In comparison, the operational (field-designed) project measured 1262 m, while the alignment originally proposed in the Forest Management Plan was 1.700 m. The substantial difference between the planned length and the designed alignments arises from local micro-relief characteristics, primarily the presence of sinkholes and pronounced cross-slopes that prevented road construction according to the initial plan and required geometric adaptation to actual terrain conditions. To facilitate comparison, earthwork quantities are expressed both in cubic meters and as percentages of total earthwork volume (Table 3).
Table 3 Earthwork volumes of forest road projects by Location module
|
Projects of forest road |
Cut volume |
Fill volume |
Total |
||
|
m3 |
% |
m3 |
% |
m3 |
|
|
Operational project |
1978.90 |
39.65 |
3012.10 |
60.35 |
4991.00 |
|
Preliminary project DTM 20X20 |
1265.30 |
46.55 |
1453.30 |
53.46 |
2718.26 |
|
Preliminary project DTM 90x90 |
776.50 |
40.44 |
1143.50 |
59.56 |
1920.00 |
The Operational Project records the highest earthwork volumes, with cut: 1978.90 m³ and fill: 3012.10 m³. In comparison, the Preliminary Projects demonstrate a substantial reduction in excavation and filling requirements. This is most evident in the DTM 90x90 m project, which achieves the lowest earthwork demand (cut: 776.50 m³; fill: 1143.50 m³). These findings suggest that preliminary designs, especially with coarser digital terrain models, may provide more efficient earthwork solutions, minimizing both material movement and construction costs, while still maintaining acceptable geometric standards (Table 3 and Fig. 13). The quality of DTMs is essential for subsequent timber skidding planning, as using different input data can result in a completely different skidding trail, depending on the extent of the obstacles (Hrůza et al. 2025). Grade of longitudinal profile of the forest roads ranges from 3.18 to 3.63% (Table 1). These values indicate that all analyzed alignments meet the prescribed design standards, with minimal variation in gradient between the operational and AI-driven projects. Prior applications of RoadEng and related optimization logic show similar cost drivers: when horizontal/vertical geometry is tuned within policy constraints, reductions in cut/fill volumes dominate total cost reductions (Heralt 2002, Sessions 2007). At the same time, the caution from DEM/DTM-accuracy studies remains pertinent: smaller apparent volumes on coarse DTMs can reflect terrain smoothing rather than genuine constructability gains, which is why high-density LiDAR or carefully validated photogrammetric DTMs are recommended for operational-level estimation (Matinnia et al. 2018, Kardoš et al. 2024, Lovrinčević et al. 2025).
The construction costs derived from the Location module for the operational and preliminary projects are summarized in Table 4.
Table 4 The costs of forest road projects by Location module
|
Projects of forest road |
Total cost, 1000's $ |
Cut cost, 1000's $ |
Fill cost, 1000's $ |
Haul cost, 1000's $ |
|
Operational project |
75.04 |
61.75 |
10.98 |
2.31 |
|
Preliminary project DTM 20X20 |
24.25 |
17.43 |
5.81 |
1.01 |
|
Preliminary project DTM 90x90 |
15.75 |
11.35 |
3.78 |
0.61 |
The Operational Project proved to be by far the most expensive, with a total cost of 75,040 USD. In contrast, the Preliminary Projects substantially reduced construction costs, with the DTM 90×90 m alternative achieving the lowest total cost of 15,750 USD. Most of the expenses were attributed to cutting operations, with the Operational Project recording the highest cut cost (61,750 USD) and fill cost (10,980 USD). Both Preliminary Projects significantly lowered these values, with the DTM 90×90 m variant emerging as the most efficient option. Haul costs were relatively minor compared to cut and fill operations, with the lowest value observed in the DTM 90×90 m project (610 USD) (Table 4, Fig. 14). Comparing the least-expensive Path Explorer routes to the corresponding preliminary projects, total costs fell by 5750 USD (19.2%) for the 20×20 m DTM and 11,250 USD (41.7%) for the 90×90 m DTM after full definition in the Location module. Similar to this is the two-step improvement:
- Ai-driven routing to find a feasible corridor
- detailed geometric optimization, reflects the hybrid GIS–AI-driven architecture advocated in the literature: deterministic GIS/DTM layers ensure constraint adherence and transparency, while AI/metaheuristics explore the non-convex design space to balance cost and geometry (Babapour et al. 2018, Picchio et al. 2018, Kazama et al. 2021).
These outcomes agree with the broader optimization literature showing that algorithmic search over feasible alignments tends to discover lower-cost solutions under given grade, curvature, and material-unit-cost constraints (Kazama et al. 2021).
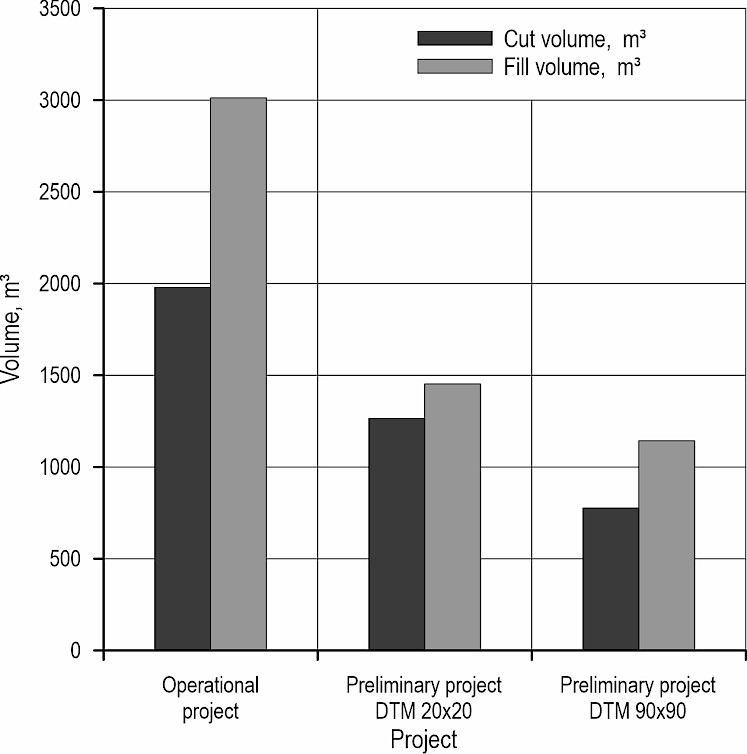
Fig. 13 Comparison of earthwork volumes
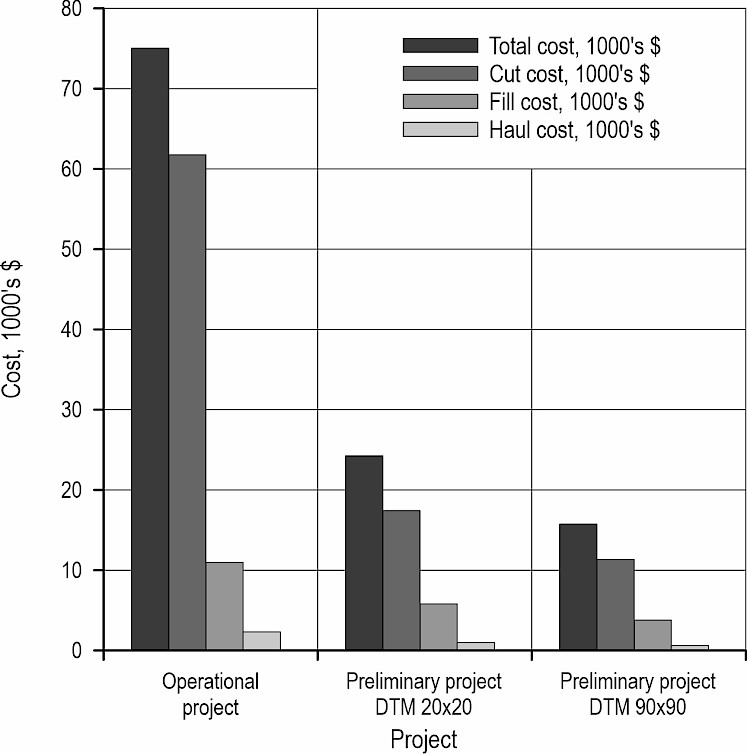
Fig. 14 Cost comparison
3.3 Environmental and Operational Implications
From an environmental standpoint, designs that minimize excavation and embankment also reduce sediment-delivery risk and exposure length, aligning with road-erosion optimization that embeds best management practices (BMPs) directly into the objective function (Efta and Chung 2014). At the network level, least-cost/A* scenario tools in landscape simulators highlight similar trade-offs between accessibility and ecological impact (Hardy et al. 2023), while multi-objective optimization approaches increasingly integrate biodiversity and soil-loss criteria alongside cost and geometry (Kim et al. 2022). These findings position our results – marked reductions in earthwork and costs at comparable grades – within a sustainability framework, suggesting that AI-driven preliminary designs can deliver lower-impact corridors while meeting technical standards.
A practical limitation of this case lies in DTM fidelity. Although the 20×20 m model captured terrain more accurately than the 90×90 m, both resolutions remain coarse relative to modern airborne or mobile LiDAR now feasible for forestry operations. Numerous studies report centimeter-to-decimeter elevation accuracy under canopy when acquisition and filtering are optimized, enabling reliable estimation of earthwork and drainage design (Matinnia et al. 2018, Kardoš et al. 2024, Lovrinčević et al. 2025). UAV-based LiDAR systems have demonstrated high potential for detecting terrain microfeatures and soil disturbance caused by forest operations, providing near-centimeter accuracy even under complex canopy conditions (Latterini et al. 2025). Parallel advances in AI-based road detection and surface-condition assessment, using LiDAR, CubeSat, or UAV imagery, offer quality-control layers that can validate or refine preliminary corridors before field staking (Buján et al. 2021, Hoseini et al. 2024, Lee et al. 2024, Winiwarter et al. 2024). As such data and models become standard, their integration with routing tools such as Path Explorer should further reduce the gap between preliminary and operational designs. Operationally, the results support a staged workflow: use AI-driven routing to generate several low-cost, geometrically feasible corridors; screen them through GIS-based constraints (hydrology, soils, exclusion zones) and sustainability objectives; then acquire high-resolution terrain data on selected candidates for final design in the Location module. Similar multi-stage planning is encouraged in network-level approaches, where construction is sequenced under sustainability constraints (Kaneko et al. 2024) and life-cycle cost management favors minimizing high-risk earthworks (Stückelberger et al. 2006).
Overall, this case confirms three points repeatedly emphasized in previous research. First, optimization-assisted preliminary design can achieve significant cost and earthwork reductions at fixed geometric standards (Heralt 2002, Babapour et al. 2018). Second, DTM resolution critically affects both the apparent efficiency and constructability of alternatives, reinforcing the need for high-resolution terrain data in operational decisions (Aruga et al. 2006, Matinnia et al. 2018, Kardoš et al. 2024). Third, the integration of GIS, AI/metaheuristics, and modern surveying technologies offers a practical pathway to cost-effective, lower-impact forest roads, consistent with recent reviews and scenario studies (Picchio et al. 2018, Kazama et al. 2021, Hardy et al. 2023).
4. Conclusions
The results of this study indicate that integrating GIS-based data with an AI-driven corridor planning system (Path Explorer) can improve the efficiency of preliminary forest road design. Under the tested conditions, the automatically generated alternatives showed potential for reducing total earthwork and estimated construction costs compared with the field-designed (operational) alignment, while maintaining acceptable geometric standards. These findings should be interpreted as indicative rather than conclusive, as they are based on modeled scenarios within the RoadEng software environment. The conclusions are specifically limited to the tested digital terrain model (DTM) resolutions of 20×20 m and 90×90 m, as well as to the »Osmača« case study area in Bosnia and Herzegovina. The reliability of AI-driven preliminary designs therefore depends strongly on terrain complexity and the quality of available elevation data. High-resolution LiDAR or photogrammetric DTMs are recommended for operational design stages to ensure accurate estimation of earthwork and costs. Despite these limitations, the results demonstrate the potential of AI-driven corridor planning systems as practical tools for generating and evaluating multiple alignment alternatives in the early phases of forest road planning. Their application can support decision-making by providing faster and data-supported preliminary designs, thereby complementing traditional field-based methods within sustainable forest engineering practice. In the long term, as data quality improves and forestry institutions adopt modern technologies, preliminary and operational designs are expected to converge, ensuring cost-efficiency, technical reliability, and sustainability in forest road management.
5. References
Abdi, E., Majnounian, B., Darvishsefat, A., Mashayekhi, Z., Sessions, J., 2009: A GIS-MCE based model for forest road planning. Journal of forest science 55(4): 171–176. https://doi.org/10.17221/52/2008-JFS
Acosta, F.C., Rengifo, S.P., García, M.L., Trondoli Matricardi, E.A., Castillo, G.B., 2023: Road network planning in tropical forests using GIS. Croatian Journal of Forest Engineering 44(1): 153–169. https://doi.org/10.5552/crojfe.2023.1742
Aruga, K., Tasaka, T., Miyata, E.S., 2006: Comparison of DEM resolution for forest road design: A case study in coniferous, western Washington State, USA. Journal of the Japan Forest Engineering Society (Japan) 21(1): 71–78. https://doi.org/10.18945/jjfes.KJ00007485445
Azizi, Z., Najafi, A., Sadeghian, S., 2014: Forest road detection using LiDAR data. Journal of Forestry Research 25(4): 975–980. https://doi.org/10.1007/s11676-014-0544-0
Babapour, R., Naghdi, R., Ghajar, I., Mortazavi, Z., 2018: Forest road profile optimization using meta-heuristic techniques. Applied Soft Computing 64(C): 126–137. DOI:10.1016/j.asoc.2017.12.015
Bajrić, M., Sokolović, D., Musić, J., Halilović, V., Knežević, J., 2022: Analiza otvorenosti, dinamike građenja, održavanja i rekonstrukcije šumskih cesta u Federaciji Bosne i Hercegovine. Nova mehanizacija šumarstva 43(1): 1–10. https://doi.org/10.5552/nms.2022.1
Begus, J., Pertlik, E., 2017: Guide for planning, construction and maintenance of forest roads. Food and Agriculture Organization of the United Nations, 64 p.
Bhatnagar, S., Puliti, S., Talbot, B., Heppelmann, J.B., Breidenbach, J., Astrup, R., 2022: Mapping wheel-ruts from timber harvesting operations using deep learning techniques in drone imagery. Forestry 95(5): 698–710. https://doi.org/10.1093/forestry/cpac023
Buján, S., Guerra-Hernández, J., González-Ferreiro, E., Miranda, D., 2021: Forest road detection using LiDAR data and hybrid classification. Remote sensing 13(3): 393. https://doi.org/10.3390/rs13030393
Chung, W., Stückelberger, J., Aruga, K., Cundy, T.W., 2008: Forest road network design using a trade-off analysis between skidding and road construction costs. Canadian journal of forest research 38(3): 439–448. https://doi.org/10.1139/X07-170
Efta, J.A., Chung, W., 2014: Planning best management practices to reduce sediment delivery from forest roads using WEPP: Road erosion modeling and simulated annealing optimization. Croatian Journal of Forest Engineering 35(2): 167–178.
Ghajar, I., Najafi, A., Ali Torabi, S., Khamehchiyan, M., Boston, K., 2012: An adaptive network-based fuzzy inference system for rock share estimation in forest road construction. Croatian Journal of Forest Engineering 33(2): 313–328.
Gigović, J.LJ., 2010: Digitalni modeli visina i njihova primena u vojnoj analizi terena. Vojnotehnički glasnik 2/10: 165–178.
IRPC – Istraživačko razvojni projektni centar, 2002: Pravilnik o projektovanju šumskih kamionskih puteva (Manual for Forest Road Design in Republic of Srpska). JPŠ Šume Republike Srpske, Banja Luka, Bosna i Hercegovina.
IRPC – Istraživačko razvojni i projektni centar, 2017: Šumskoprivredna osnova za Čemerničko šumskoprivredno područje (važnost od 01.01.2018. do 31.12.2027. godine). JPŠ Šume Republike Srpske, Banja Luka, Bosna i Hercegovina.
IRPC – Istraživačko razvojni projektni centar, 2023: Projekat šumskog puta »Pelengići – odjel 3«, P.J. »Cvrcka«, ŠG »Čemernica« (Broj 11.29/1121-133-6/23). JPŠ Šume Republike Srpske, Banja Luka, Bosna i Hercegovina.
Hardy, C., Messier, C., Valeria, O., Filotas, E., 2023: A LANDIS-II extension for simulating forest road networks. Canadian Journal of Forest Research 53(7): 503–518. https://doi.org/10.1139/cjfr-2022-0306
Heralt, L., 2002: Using the ROADENG system to design an optimum forest road variant aimed at the minimization of negative impacts on the natural environment. Journal of forest Science 48(8): 361–365. https://doi.org/10.17221/11926-JFS
Holzinger, A., Schweier, J., Gollob, C., Nothdurft, A., Hasenauer, H., Kirisits, T., Häggström, C., Visser, R., Cavalli, R., Spinelli, R., Stampfer, K., 2024: From Industry 5.0 to Forestry 5.0: Bridging the gap with Human-Centered Artificial Intelligence. Current Forestry Reports 10(6): 442–455. https://doi.org/10.1007/s40725-024-00231-7
Hoseini, M., Puliti, S., Hoffmann, S., Astrup, R., 2024: Pothole detection in the woods: a deep learning approach for forest road surface monitoring with dashcams. International Journal of Forest Engineering 35(2): 303–312. https://doi.org/10.1080/14942119.2023.2290795
Hrůza, P., Mikita, T., Žižlavská, N., 2025: Application of unmanned aerial vehicle and airborne light detection and ranging technologies to identifying terrain obstacles and designing access solutions for the interior parts of forest stands. Forests 16(5): 729. https://doi.org/10.3390/f16050729
Jaafari, A., Pazhouhan, I., Bettinger, P., 2021: Machine learning modelling of forest road construction costs. Forests 12(9): 1169. https://doi.org/10.3390/f12091169
Kaneko, S., Kim, H.B., Yoshioka, T., 2024: Method of designing forest road construction scenario with GIS-based calibration using sustainable forestry model. Results in Engineering 24: 103078. https://doi.org/10.1016/j.rineng.2024.103078
Kardoš, M., Sačkov, I., Tomaštík, J., Basista, I., Borowski, Ł., Ferenčík, M., 2024: Elevation accuracy of forest road maps derived from aerial imaging, airborne laser scanning and mobile laser scanning data. Forests 15(5): 840. https://doi.org/10.3390/f15050840
Kazama, V.S., Dalla Corte, A.P., Robert, R.C.G., Sanquetta, C.R., Arce, J.E., Oliveira-Nascimento, K.A., DeArmond, D., 2021: Global review on forest road optimization planning: Support for sustainable forest management in Amazonia. Forest Ecology and Management 492: 119159. https://doi.org/10.1016/j.foreco.2021.119159
Kim, S.W., Piao, Z., Lee, D.K., 2022: Optimal road design using genetic algorithm to improve biodiversity and risk of soil loss. Geocarto International 37(27): 14811–14827. https://doi.org/10.1080/10106049.2022.2091159
Latterini, F., Dyderski, M.K., Picchio, R., Venanzi, R., Spinelli, R., Magagnotti, N., Schweier, J., Kushwaha, S.K.P., Camarretta, N., Watt, M.S., 2025: Mapping skid trails and evaluating soil disturbance from UAV-based LiDAR surveys in Mediterranean forests. Land Degradation & Development 37(3): 1082–1092. https://doi.org/10.1002/ldr.70162
Lee, H.S., Kim, G.H., Ju, H.S., Mun, H.S., Oh, J.H., Shin, B.S., 2024: Developing forest road recognition technology using deep learning-based image processing. Forests 15(8): 1469. https://doi.org/10.3390/f15081469
Lovrinčević, M., Papa, I., Janeš, D., Hodak, L., Pentek, T., Đuka, A., 2025: New possibilities of field data survey in forest road design. Sensors 25(13): 4192. https://doi.org/10.3390/s25134192
Matinnia, B., Parsakhoo, A., Mohamadi, J., Jouibary, S.S., 2018: Study of the LiDAR accuracy in mapping forest road alignments and estimating the earthwork volume. Journal of Forest Science 64(11): 1212–4834. https://doi.org/10.17221/87/2018-JFS
McDermid, G.J., Terenteva, I., Chan, X.Y., 2025: Mapping trails and tracks in the boreal forest using LiDAR and convolutional neural networks. Remote Sensing 17(9): 1539. https://doi.org/10.3390/rs17091539
Meignan, D., Frayret, J.M., Pesant, G., Blouin, M., 2012: A heuristic approach to automated forest road location. Canadian Journal of Forest Research 42(12): 2130–2141. https://doi.org/10.1139/x2012-140
Morais, P.D.P., Arima, E.Y., de Souza, Á.N., Pereira, R.S., Emmert, F., Cardoso, R.M., Matricardi, E.A.T., 2023: Assessment of forest road models in concession areas in the Brazilian Amazon. Forests 14(7): 1388. https://doi.org/10.3390/f14071388
Norouzi Sangtabi, A., Parsakhoo, A., Ezzati, S., Mostafa, M., 2025: Forest road network planning based on topological measures in Hyrcanian recreational forest parks using graph theory. Iranian Journal of Forest 16(5): 87–98. https://doi.org/10.22034/ijf.2025.473178.2003
Picchio, R., Pignatti, G., Marchi, E., Latterini, F., Benanchi, M., Foderi, C., Venanzi, R., Verani, S., 2018: The application of two approaches using GIS technology implementation in forest road network planning in an Italian mountain setting. Forests 9(5): 277. https://doi.org/10.3390/f9050277
Sessions, J. (Ed.), 2007: Forest road operations in the tropics. Berlin, Heidelberg: Springer Berlin Heidelberg. 170 p.
Stückelberger, J.A., Heinimann, H.R., Burlet, E.C., 2006: Modeling spatial variability in the life-cycle costs of low-volume forest roads. European Journal of Forest Research 125(4): 377–390. https://doi.org/10.1007/s10342-006-0123-9
Winiwarter, L., Coops, N.C., Bastyr, A., Roussel, J.R., Zhao, D.Q., Lamb, C.T., Ford, A.T., 2024: Extraction of forest road information from cubesat imagery using convolutional neural networks. Remote Sensing 16(6): 1083. https://doi.org/10.3390/rs16061083
Zhou, X., Mou, L., Ao, T., Huang, X., Yang, H., 2025: Effect of the spatial resolution of digital terrain data obtained by drone on urban fluvial flood modeling of mountainous regions. Hydrology and Earth System Sciences 29(7): 1963–1980. https://doi.org/10.5194/hess-29-1963-2025
© 2026 by the authors. Submitted for possible open access publication under the
terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Authors’ addresses:
Assoc. prof. Vladimir Petković, PhD *
e-mail: vladimir.petkovic@sf.unibl.org
Assoc. prof. Dane Marčeta, PhD
e-mail: dane.marceta@sf.unibl.org
Assist. Milan Sukur, BSc
e-mail: milan.sukur@sf.unibl.org
University of Banja Luka
Faculty of Forestry
Bulevar Petra Bojovića 1a
78000 Banja Luka
BOSNIA AND HERZEGOVINA
Goran Ćetković, MSc
e-mail: goran.cetkovic@student.sf.unibl.org
Public Forest Company »Šume Republike Srpske« Ltd.
Romanijska 1
71350 Sokolac
BOSNIA AND HERZEGOVINA
Darko Ljubojević, PhD
e-mail: darkoljubojevic@gmail.com
Public Forest Company »Šume Republike Srpske« Ltd.
Vožda Karađorđa 4/2
79101 Prijedor
BOSNIA AND HERZEGOVINA
* Corresponding author
Received: September 18, 2025
Accepted: November 17, 2025
Original scientific paper