
Designing Harvester Trail Systems for Mechanised Logging Across Diverse Soil Types Using Nominal Ground Pressure Criteria
doi: https://doi.org/10.5552/crojfe.2026.2519
volume: 47, issue: 2
pp: 17
- Author(s):
-
- Poje Anton
- Krč Janez
- Leban Vasja
- Article category:
- Original scientific paper
- Keywords:
- harvester trail, nominal ground pressure, soil water content, forest operation, soil damage, rutting, soil types
Abstract
HTML
Soil conservation during forestry operations is an increasing concern. This study proposes a theoretical model to forecast the depth of ruts associated with harvester trail systems and organisational boundary conditions, with the aim of reducing the harmful impacts of heavy logging machinery. The research combines empirical data on soil penetration resistance and soil water content of six soil types with theoretical rut depth models, emphasising the organisational dimensions of forest operations. Empirical data were gathered from sixteen soil sample plots in Slovenia. Based on this data and existing litterature, six models were developed to show the relationship between soil penetration resistance and soil water content. The maximum harvester trail length was then calculated for each soil type, based on harvest intensity and rut depth models. The findings indicate that modelled rut dept is less than 0.1 m if the soil can withstand a nominal ground pressure of 849 kPa in all analysed soil types. However, modelled rut depth of any soil type will consistently exceed 0.1 m when the soil cannot withstand a nominal ground pressure of 456 kPa. To avoid deeper ruts, it is advisable to plan and use harvester trail lengths of no more than 100 metres at 40% volumetric soil water content when the soil type is unknown. Incorporating soil type data into rut models could be an effective means of predicting rut depth at a given time, thereby boosting the efficiency of forestry operations.
Designing Harvester Trail Systems for Mechanised Logging Across Diverse Soil Types Using Nominal Ground Pressure Criteria
Anton Poje, Janez Krč, Vasja Leban
https://doi.org/10.5552/crojfe.2026.2519
Abstract
Soil conservation during forestry operations is an increasing concern. This study proposes a theoretical model to forecast the depth of ruts associated with harvester trail systems and organisational boundary conditions, with the aim of reducing the harmful impacts of heavy logging machinery. The research combines empirical data on soil penetration resistance and soil water content of six soil types with theoretical rut depth models, emphasising the organisational dimensions of forest operations. Empirical data were gathered from sixteen soil sample plots in Slovenia. Based on this data and existing litterature, six models were developed to show the relationship between soil penetration resistance and soil water content. The maximum harvester trail length was then calculated for each soil type, based on harvest intensity and rut depth models. The findings indicate that modelled rut dept is less than 0.1 m if the soil can withstand a nominal ground pressure of 849 kPa in all analysed soil types. However, modelled rut depth of any soil type will consistently exceed 0.1 m when the soil cannot withstand a nominal ground pressure of 456 kPa. To avoid deeper ruts, it is advisable to plan and use harvester trail lengths of no more than 100 metres at 40% volumetric soil water content when the soil type is unknown. Incorporating soil type data into rut models could be an effective means of predicting rut depth at a given time, thereby boosting the efficiency of forestry operations.
Keywords: harvester trail, nominal ground pressure, soil water content, forest operation, soil damage, rutting, soil types
1. Introduction
Fully mechanised cut-to-length (FM–CTL) technology accounts for 37% of the global harvest of roundwood, making it the most common logging method, followed by the full-tree/tree-length method (Lundbäck et al. 2021). The level of logging mechanisation varies significantly across European countries. It is highest in Scandinavia, where mechanisation rates are close to 100% (Asikainen et al. 2009), and lowest in Eastern Europe, particularly in poorer countries (Moskalik et al. 2017). Climate change has driven the expansion of FM–CTL technology into areas that might not be optimal from operational, ecological and economic perspectives, such as steep slopes, stands with high DBH trees and a lower share of conifers, and terrains with inadequate soil conditions (Kärhä et al. 2018).This is due to an increasing share of salvage logging, where FM–CTL is the most suitable technology despite higher costs (Kunca et al. 2019, Zahradník and Zahradníková 2019), because of high productivity and work safety. A shortage of forest workers (Mederski et al. 2021, Šporčić et al. 2024) is expected to further accelerate the adoption of FM–CTL technology.
Due to their technical properties, each technology requires its own trail system, which determines the limitations for usage (Visser and Stampfer 2015). Timber harvesting and extraction machines move around the forest via a network of skid and harvesting trails. This system enables the machines to access the trees and transport the harvested timber to temporary storage areas near forest roads. To ensure the efficient and safe operation of forestry activities and promote environmental sustainability and economic viability, the road system must be properly designed. A well-designed system can promote efficiency and productivity by shortening travel distances, reducing fuel consumption, and minimising wear and tear (Cadei et al. 2020). Optimal trail distribution reduces the total area covered, mitigating negative effects such as soil compaction, erosion, and damage to remaining trees and young growth (Horn et al. 2007, Picchio et al. 2020, Kizha et al. 2021, Ursić et al. 2022, Korpunen et al. 2025). It also prevents machinery from driving on steep slopes and in ecologically sensitive areas, such as wetlands (Salmivaara et al. 2024). Properly planned trails help prevent machinery from slipping and rolling over on steep terrain, thereby reducing the risk of workplace accidents (Visser and Stampfer 2015). In addition, a well-designed trail system helps to maintain the aesthetic value of the forest, which is important for recreational use and the social value of forests (Forest Stewardship: Planning for Beauty and Enjoyment). Forests have cultural significance for many people, so maintaining their appearance and condition is a key factor in sustainable management. Technologies such as GPS (Ovaskainen and Riekki 2022), Geographic Information Systems (Abdi et al. 2022, Mohtashami 2022), laser scanners (Kim et al. 2025) and unmanned aerial vehicles (Heppelmann et al. 2022, Siafali and Tsioras 2024) enable detailed mapping of existing trails (Bhatnagar et al. 2022), terrain analysis, determination of optimal paths, and better terrain adaptation (Visser and Obi 2021). Simulating different scenarios ensures that the road system is designed to minimise environmental impact and increase work process efficiency (Holmström et al. 2023).
When designing skidding and harvesting trails, it is necessary to consider the technical properties of the machines involved. One of the main determinants of trail spacing (or trail density) in FM–CTL operations is the length of the machine crane. In modern thinning operations, a spacing of 20 metres between trails is commonly used. The harvester can clear the trail ahead while thinning the forest on both sides of the trail in 10-metre-wide strips (Lahtinen 2011, Abdi et al. 2022). In challenging terrain with steep slopes, high rockiness or low soil bearing capacity, the trail spacing can be greater. For example, where the soil has a low bearing capacity, every second trail can be used for forwarding, with the harvester piling the logs at the correct distance for the forwarder to collect them. Even greater trail spacing can be achieved through directional felling in conjunction with manual chainsaw harvesting or pre-skidding with skidders. This can be particularly important in forest stands with very mature trees, where the tree diameter at breast height exceeds the technical limits of the harvester felling head. In this case, the role of the harvester is to finalise the production of logs (Krč et al. 2014). To decrease the number of passes, and thus soil disturbance, several options have been suggested: designing a harvester trail system with looped trails; providing optimal spacing between trails within a stand; directing main routes to areas that can withstand the heaviest load; and widening the trail by steering the tyres so that they do not follow the same track every time (Uusitalo et al. 2015, Abdi et al. 2022).
The density and network design of harvester trails, as well as the ongoing trend of increasing the size, power and load of machines, directly affect soil disturbance (Picchio et al. 2020, Labelle et al. 2022). The primary visible signs of the impact of forestry operations on soil are ruts, soil compaction and mass movement (Picchio et al. 2020), whereas secondary signs include gutters and ditches caused by erosion (Reeves et al. 2012). Invisible signs include physical changes, such as a reduced capacity to retain water, air and nutrients in the soil, as well as chemical and biological changes that affect the soil ecosystem and productivity (Cambi et al. 2015, Picchio et al. 2020).
The question of the acceptable extent of soil damage is highly interdisciplinary due to the various aspects of forest management that need to be considered (e.g. economic, environmental, ethical and legislative factors), as well as the different views on the impact of soil damage and the possibilities for reducing it (Owende et al. 2002, Nordlund et al. 2013). This complexity is reflected in the variety of definitions of acceptable soil damage around the world, which primarily reflect stakeholder agreements rather than soil conditions or management practices (Poje et al. 2019). Thus, ruts are most often defined by their depth, width and length (Curran et al. 2008, Duckert et al. 2009). The allowable rut depth ranges from 5 to 60 cm in different regions across the globe, while the length of ruts considered to constitute soil damage ranges from 0 to 15 m (Poje et al. 2019, 2021). For example, Kankare et al. (2019) defined a damaged trail as one with rutting more than 1 metre long and a depth of more than 10 cm on mineral soils and 20 cm on peatlands.
Kizha et al. (2021) summarised that the strategies most frequently discussed in the literature review are: (1) proper harvest layout and skid trail planning, (2) appropriate training and supervision, (3) directional felling, (4) opting CTL method, and (5) winter harvesting. Picchio et al. (2020) emphasised that, to minimise the impact of vehicles on soil, the following should be considered: proper design of forest infrastructure; training and supervision; alternative skidding methods (e.g. horses); site preparation; and mulching. Appropriate planning of the trail network (i.e. trafficability maps) is crucial for maximising the number of looped trails (Lahtinen 2011, Labelle et al. 2022).
The factors affecting the severity of soil compaction and rutting are (Saarilahti 2002, Košir 2010, Jones and Arp 2019, Uusitalo et al. 2020, Heppelmann et al. 2022, Mohtashami et al. 2022, Golanbari et al. 2025): soil and terrain properties (water content, organic matter content, bulk density, thickness of the humus layer, ground bearing capacity, soil type, topographical indices), operational factors (timing of the operation, logging trail networks properties, number of passes, traffic intensity, cumulative load, weather conditions) and technical factors (machine type, mass and dimensions, tyre dimensions and pressure, steering and transmission system, axle load, ground pressure, load capacity, machine velocity). Best Management Practice reduces the overall costs of timber harvesting operations and the environmental impact of logging (Jamaluddin et al. 2023). The purpose of these normative documents is also to protect water quality and maintain site productivity (Aust and Blinn 2004).
The properties of the factors included in the models determine whether they are static or dynamic. Static models use only unchanging factors over time (Akay and Erdaş 2019), whereas dynamic models consider factors that change over time or in real time (Salmivaara et al. 2020). Multi-criteria models consider the complex interrelationship of factors influencing soil rutting, combining soil, technical and operational factors (Jones and Arp 2019, Sirén et al. 2019b, Salmivaara et al. 2020). Prediction models based on soil factors most frequently use soil water content, depth to water and soil type, where bulk density, organic matter, clay and skeleton content affect soil strength, penetration and vane resistance (Costantini and Doley 2001). Of the technical factors in the models, the number of machine passes dominates, which is closely connected with the type, accessories, and morphology of the machine, as well as the dimensions of the tyres, but also with operational factors such as spatial distribution and harvest intensity. The latter affects the number of machine passes through the total harvesting volume and cumulative load (Golanbari et al. 2025). In general, rut depth increases with higher soil water content, lower cone penetration resistance and shear strength, greater cumulative mass and number of passes, higher wheel load and tyre inflation pressure, and lower depth-to-water values.
Sirén et al. (2019a) developed a model to predict rut depth following forwarder operations, taking into account the number of machine passes, the volumetric soil water content, and the depth of the soil organic layer. Soil texture and density influence the general sensitivity to rut formation, while soil water content increases rutting in more cohesive soils. The effect of the number of passes was studied in the 1980s and 1990s by Abebe and Antilla, among others (Saarilahti 2002). Furthermore, rut formation and depth are dynamic processes that vary over time. After the initial few passes of a machine, the soil becomes compressed to such an extent that it determines the final rut depth (Košir 2010, Abebe 1989 and Antilla 1998 cit. by Saarilahti 2002). This relationship is exponential and is primarily determined by soil texture (Cambi et al. 2015, Thees and Olschewski 2017). The number of passes are usually included in the research designs as a factor (Vossbrink and Horn 2004, Vennik et al. 2017, Uusitalo et al. 2020, Allman et al. 2022). Furthermore, some authors (e.g. Eliasson and Wästerlund, 2007, Pandur et al. 2022) have reported that the number of passes is the main driver of rut depth, with the first pass having the greatest impact (e.g. Uusitalo et al. 2020).
The models used the following soil-based factors: soil water content (Costantini and Doley 2001, Jourgholami and Majnounian 2011, Jones and Arp 2019, Uusitalo et al. 2019, 2020, Mohtashami et al. 2022), cone penetration resistance (Grünberg et al. 2025), shear vane resistance (Costantini and Doley 2001), bulk density (Uusitalo et al. 2019, 2020), thickness of humus layer (Uusitalo et al. 2020) and soil type (Vennik et al. 2019, Uusitalo et al. 2020, Mohtashami et al. 2022), from machine-related cumulative mass driven, wheel load (Golanbari et al. 2025), tyre inflation, specifications and machine type (Jones and Arp 2019), number of passes (Jourgholami and Majnounian 2011, Vennik et al. 2019, Mohtashami et al. 2022, Golanbari et al. 2025), and from environmental and topographic factors depth-to-water (Heppelmann et al. 2022, Mohtashami et al. 2022, Schönauer 2022, Cao 2024, Latterini et al. 2024), topographic wetness index (Schönauer 2022), terrain slope (Visser and Stampfer 2015, Cao 2024) and weather conditions (Kankare et al. 2019, Cao 2024).
The above literature review shows that soil type is an important factor influencing rutting and soil damage, highlighting the need to improve our understanding of the nominal ground pressure of different soil types. Therefore, our study aimed to develop a model to forecast rut depth for harvesting operations using FM–CTL technology by upgrading the current rut depth models with empirical soil characteristic data, harvest intensity, and harvester trail system characteristics. While the study focuses on middle European soil types, it is not limited to Europe, as many of these soil types can also be found worldwide.
2. Materials and Methods
This study was carried out in two phases. First, soil water content and soil penetration resistance data were measured empirically on sampling plots around Slovenia. Based on these measurements, several penetration resistance models were developed. Second, theoretical rut depth models under different working conditions (e.g. soil type, soil water content, harvesting intensity, machinery capacity) were created by combining empirical and theoretical data.
2.1 Data Sampling and Penetration Resistance Models
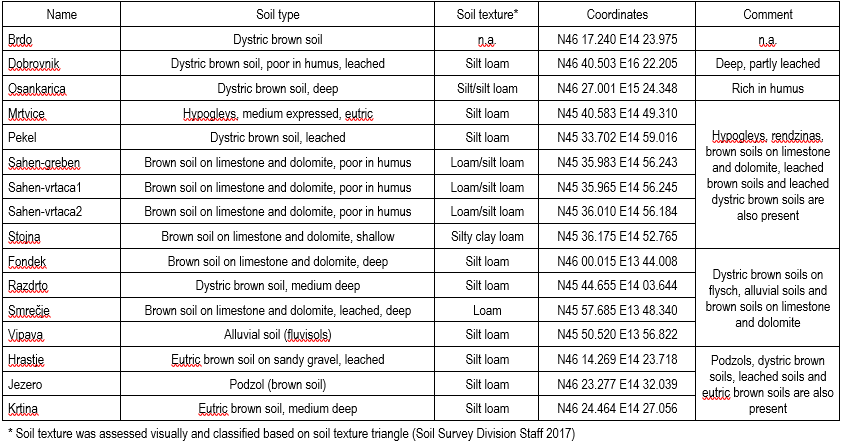
Soil penetration and water content data were collected on 16 sample plots in Slovenian forests, encompassing the variability of forests and major soil types as much as possible (Table 1). The main forest soil types were extracted and stratified from the Slovenian Forest Soil Atlas (Urbančič et al. 2005). All types are classified as fine grained soils with medium to low bearing capacity (Mohtashami et al. 2017).
The data were collected between August 2017 and September 2018. Each sample plot comprised seven smaller, square-shaped plots, each with a side length of one metre. These smaller plots were four metres apart in a straight line, as depicted in Fig. 1. Two to four measurements were taken on each of the seven smaller plots to maximise variability in soil water content and penetration resistance for each soil type. In total, 1785 measurements were taken and then averaged per sample plot for each collection date. Finally, 557 aggregated measurements were considered in the analyses.
Table 1 Pedologic characteristics of sample plots
In order to measure penetration resistance and soil volumetric water content, the organic topsoil layer was removed and five measurements were taken with the Fieldscout SC 900 soil compaction meter (i.e. penetrometer) and the Fieldscout TDR 300 volumetric soil water content meter, respectively. The penetrometer used in this study was equipped with a 1/2" cone size diameter with an angle of 30 degrees. The soil water content meter has been configured to align with the standard soil type and has undergone factory calibration. For each of the seven smaller plots, an average soil water content and penetration resistance at a depth of 10 to 20 cm were calculated from the five measurements.
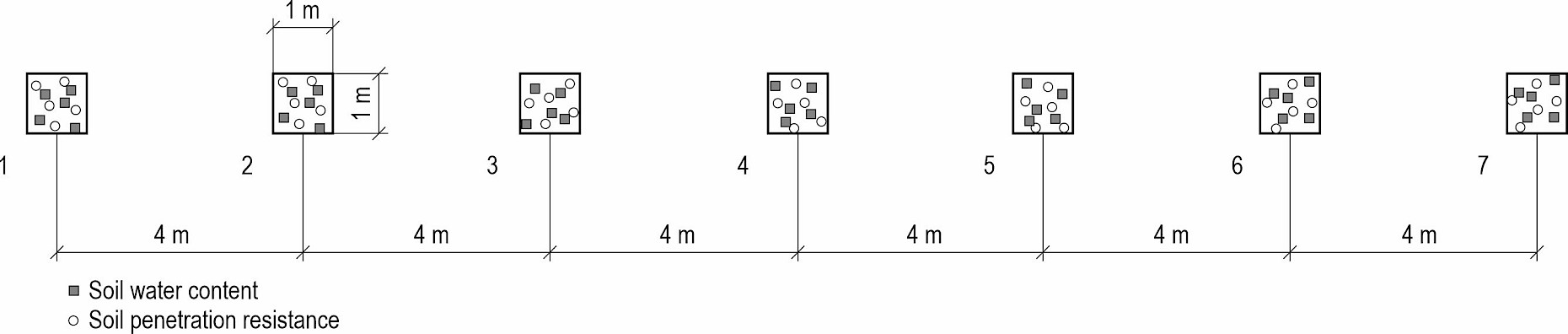
Fig. 1 Schematic representation of seven smaller plots on a sample plot
Following the collection of data, an examination was conducted using statistical software IBM SPSS® 25 and MS Excel® 2019. The constant and parameter b1 were employed to model soil penetration resistance on various soil types subject to measured volumetric soil water content in Eq. 1. The parameter b1 and the constantare contingent upon the soil type. This equation has been derived from empirical data collected in the field. Following the regression of the soil water content to soil penetration resistance, the optimal function was determined to be linear, with the independent variable of water content expressed through its natural logarithm. The data were processed and analysed using MS Excel® 2019.

2.2 Theoretical Models
A theoretical approach was employed to establish the relationship between the machine characteristics, soil properties and rut depth. To calculate rut depth, the Abebe model (Eq. 2) from 1989 was used, it basically being the Scholander model from 1974 (Saarilahti 2002). The number of passes counts as the number of passes with loaded machine and includes passes without load.

The method of collection of data and unknown variables and its use in the corresponding formulae is depicted in Fig. 2.
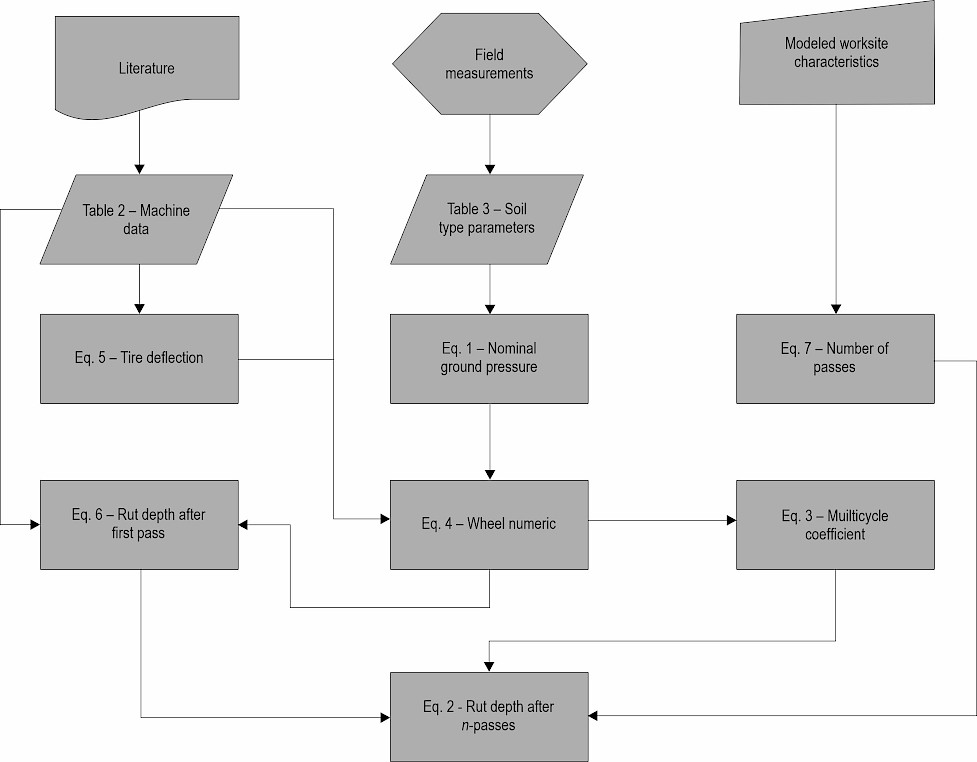
Fig. 2 Graphical representation of equations and its parameter sources
Modelling the multicycle coefficient a (Equation 3) is based on the two-way traffic of a machine travelling to and from a forest stand empty and loaded, respectively (Saarilahti 2002). It encompasses the characteristics of the load (e.g. machine weight) and the properties of the soil (e.g. soil type).

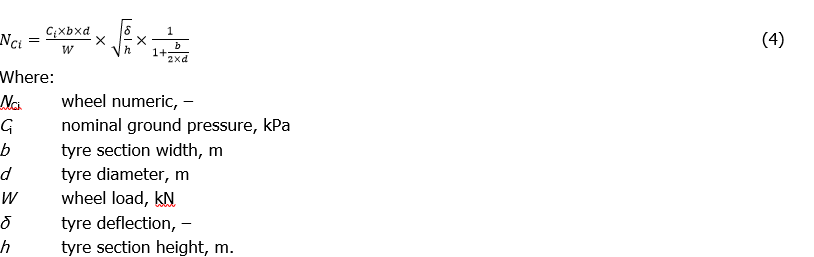
To calculate the wheel numeric Nci, data on the characteristics of the wheel, the nominal ground pressure and the weight of the vehicle are required. One of the tyre parameters is tyre deflection, which increases the tyre contact area with the ground. This generates more traction and reduces soil disturbance. Saarilahti (2002) proposed the following model for calculating tyre deflection, which is based on tyre inflation pressure and wheel load (Eq. 5). This equation was also used in this study.

The last unknown variable in Eq. 2 is the rut depth after the first pass z1. This can be modelled using Eq. 6 below, as described by Maclaurin (Saarilahti 2002). The rut depth after the first pass depends strongly on the tyre diameter and the number of wheels on the respective machine.

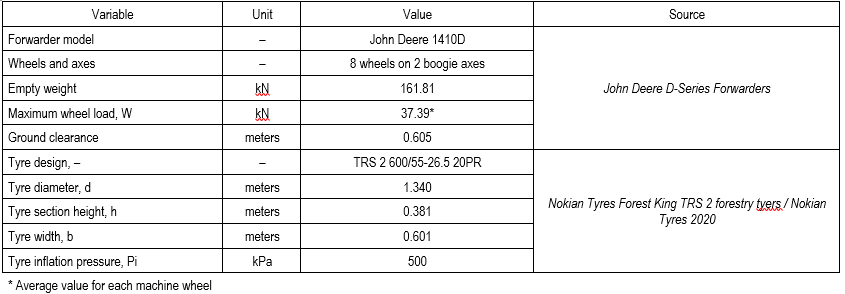
This study focused on the parameters of a John Deere 1410D forwarder. The 1410D is the most frequently used forwarder in Slovenian forests. It uses Nokian Forest King TRS 2 600/55-26.5 20PR tyres, whose parameters are shown in Table 2 below.
Table 2 Main characteristics of the forwarder used for computation
In order to calculate the rut depth according to Eq. 2, it is necessary to determine the number of passes (n in Eq. 2). A comprehensive review of the extant literature revealed a paucity of studies that addressed the calculation of the number of passes. In this theoretical approach, the number of passes is derived from the organisational, terrain and forest characteristics. It is possible to calculate the theoretical number of passes at the longest harvester trail by using Eq. 7, on the condition that the harvest intensity, machine volume load, harvester trail density and the maximum harvester trail length that ends at a forest road are known. The number of passes for the longest harvester trail (n) is defined as the number of passes with a loaded machine and includes passes without load. The theoretical number of passes is obtained by dividing the total amount of wood to be harvested, expressed as a function of the maximum harvester trail length L and harvester trail density H, with the volume of the single forwarder load M. The equation holds when assuming that the distribution of wood to be harvested is proportionally distributed among the harvester trails.

In deriving the theoretical equation for the number of passes, the hypothetical setting was depicted as a 1 hectare squared working site with equally distributed trees (Fig. 3). The forwarder traverses harvester trails, with a spacing of 20 metres between each trail. This is equivalent to the length of the boom reach multiplied by two, as it is assumed that the machine collects the wood on both sides of the trail. The calculated trail density is thus 500 m ha-1. For the sake of argument, the harvest intensity H is set to 100 m3 ha-1, the maximum harvester trail length L to 150 m and the forwarder load M to 10 m3. Pursuant to Eq. 7, the number of passes on each harvester trail (n) is equivalent to 3. Alternatively, the maximum harvester trail length (L) can be modelled when the number of passes is known (i.e. when it is determined by the maximum allowed rut depth on a given soil type) by manipulating Eq. 7 and exposing L.
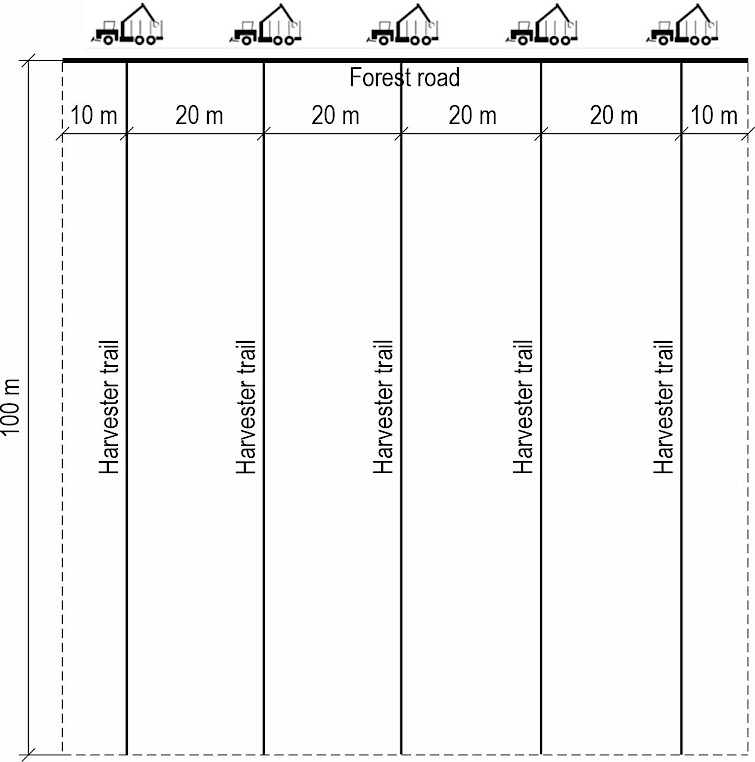
Fig. 3 Hypothetical setting for a hectare plain with five harvester trail parts
3. Results
3.1 Soil Penetration Resistance Models
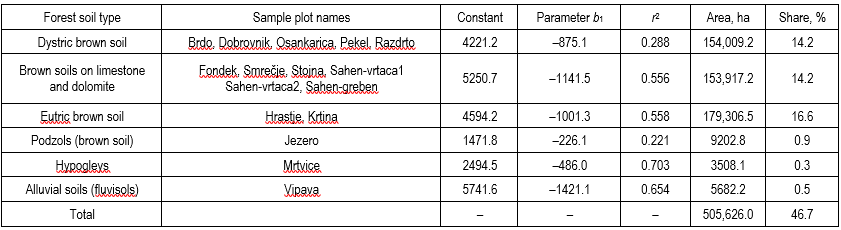
Following the collection of data pertaining to each soil type, a total of six models were constructed to represent soil penetration resistance (conf. Table 3). It is evident that models of soil penetration resistance are indicative of soil bearing capacity, with this capacity varying according to differing soil types and volumetric soil water contents. The data from plots with the same soil type were merged according to soil type in six classes, namely (1) Dystric brown soil, (2) Brown soils on limestone and dolomite, (3) Eutric brown soil, (4) Podzols (brown soil), (5) Hypogleys, and (6) Alluvial soils (fluvisols). As illustrated in Table 3, the distribution of each soil type in Slovenia is presented, along with the values of the pertinent parameters. The six primary classes have been found to encompass approximately 47% of Slovenian forest soil types (Urbančič et al. 2005).
Table 3 Values of parameter b1 and constant, coefficient of determination, and spatial extent of forest soil types in Slovenia (Urbančič et al. 2005)
The findings indicate that soil penetration resistance decreases when soil water content increases, a phenomenon observed across all soil types (Fig. 4).
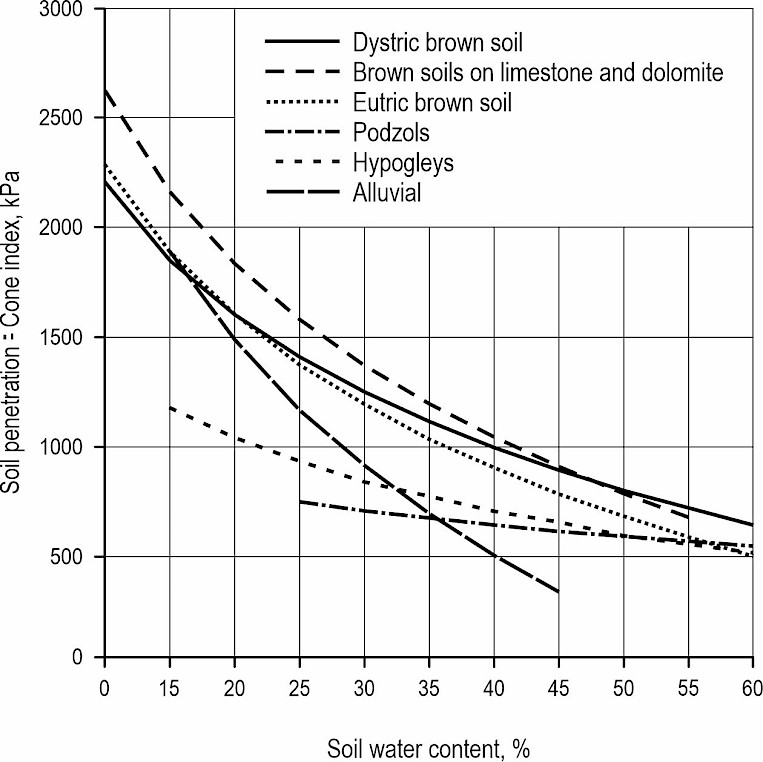
Fig. 4 Cone index (kPa) as a function of volumetric soil water content (%) on analysed soil types
The soil penetration resistance of the soil types analysed varies in a similar manner with soil water content, but to a different extent. In circumstances where the soil water content is elevated, the most resilient soils are those designated as dystrict brown soils. These soils exhibit a notable resistance to penetration, which remains consistent as the soil water content increases. Soils exhibiting reduced resistance in terms of soil bearing capacity include alluvial soils, hypogleys, and podzols. It has been demonstrated that the penetration resistance of alluvial soils decreases more rapidly with increasing soil water content; that is to say, a large decrease in soil penetration resistance is observed for a relatively small increase in soil water content. Conversely, the penetration resistance of podzols is typically low, irrespective of variations in soil water content.
3.2 Rut Depth After First Pass (z1) on Analysed Soil Types
The rut depth after the first pass (Eq. 6) is largely affected by soil type and volumetric soil water content (Fig. 5). As the water content of soil is increased, the soil bearing capacity undergoes changes at varying rates in accordance with the distinct characteristics of different soil types and water contents. Alluvial soil is characterised by a rapid increase in rut depth with increasing soil water content, reaching a limit of 0.1 m and 0.45 m with less than 40% and 50% soil water content, respectively (Poje et al. 2019). It has been established that other soil types attain the 0.1 m and 0.18 m limit with 55% and 70% soil water content, or higher, respectively.
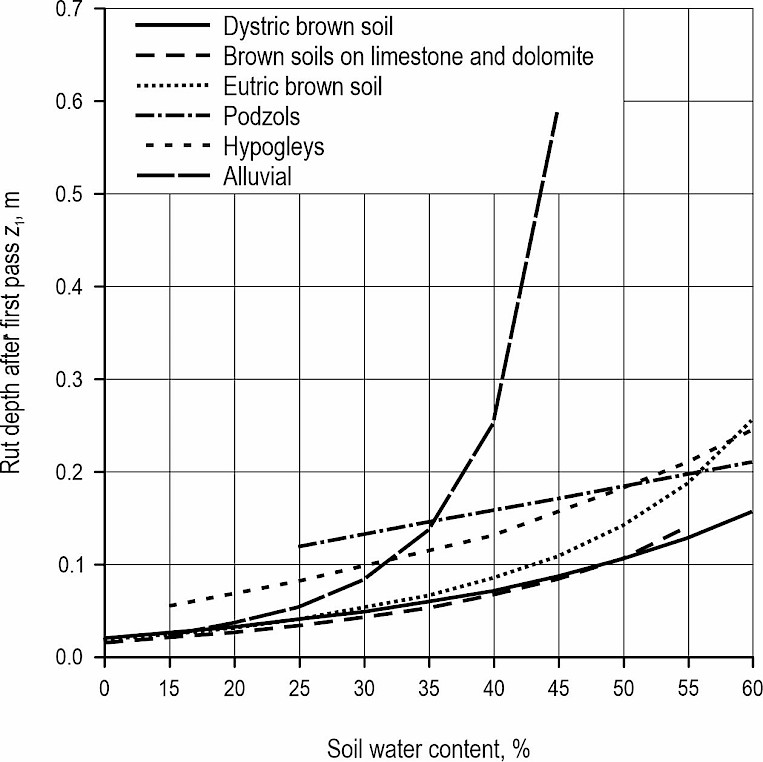
Fig. 5 Variation of rut depth after the first pass (z1) with soil type and soil water content
3.3 Rut Depth Subject to Number of Passes and Soil Type
As illustrated in Fig. 6, the rut depth is contingent upon the number of passes (zn) for the six soil types that have been analysed. The graph illustrates the variations in rut depth for a reference soil water content of 35%, which is commensurate with the lower and upper plasticity values for brown soils on limestone and dolomite (Zore 2025). Constant levels of other parameters were maintained: maximum harvester trail length (100 m), harvest intensity (100 m3 ha-1), volume load (14.74 m3) and harvester trail density (400 m ha-1) (see also Eq. 7). In consideration of the aforementioned parameters, it is evident that the rut depth undergoes an increase as the number of passes increases, exhibiting variability amongst diverse soil types. The rut depth of dystric brown soils and brown soils on limestone and dolomite does not exceed 10 cm, even after 19 passes. It has been determined that eutric brown soils exceed the 10 cm rut depth limit after 12 passes, podzols after 2 passes, while hypogleys and alluvial soil exceed this limit after the first pass.
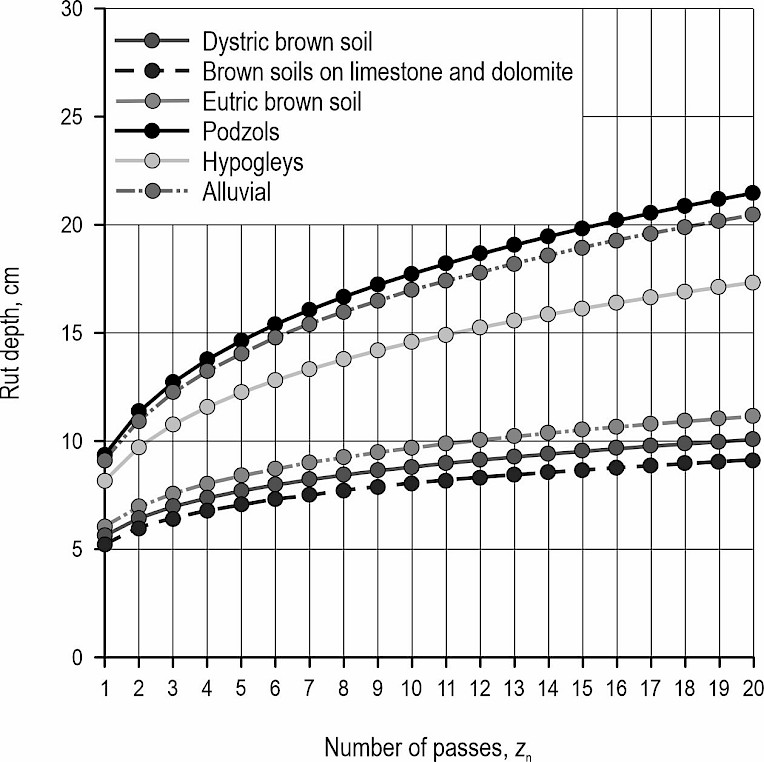
Fig. 6 Increasing rut depths with increasing number of passes for the analysed soil types
3.4 Rut Depth Subject to Number of Passes, Soil Water Content, Harvest Intensity, Harvester Trail Length and Soil Types
Fig. 7 depicts outcomes of modelling rut depths for varying soil water contents, number of passes, and soil types. The central premise of this presentation is to ascertain the maximum number of passes that will still result in rut depths below 0.1 m for each soil type with specified soil water content, for a reference harvest intensity of 100 m3 ha-1 and a maximum harvester trail length of 100 m. The presence of alluvial soils is restricted to six passes on soils with a soil water content of 35% or less. A similar situation is seen with podzols. However, it should be noted that up to the fifth pass, the soil water content may be up to 40%. It has been determined that six passes are feasible on hypogleys with soil water content of up to 45%, and this percentage is 50% for eutric brown soils and 55% for dystric brown soils and brown soils on limestone and dolomite. However, if the harvester trail length is reduced, the 0.1 m threshold is attained on soils with higher soil water contents.
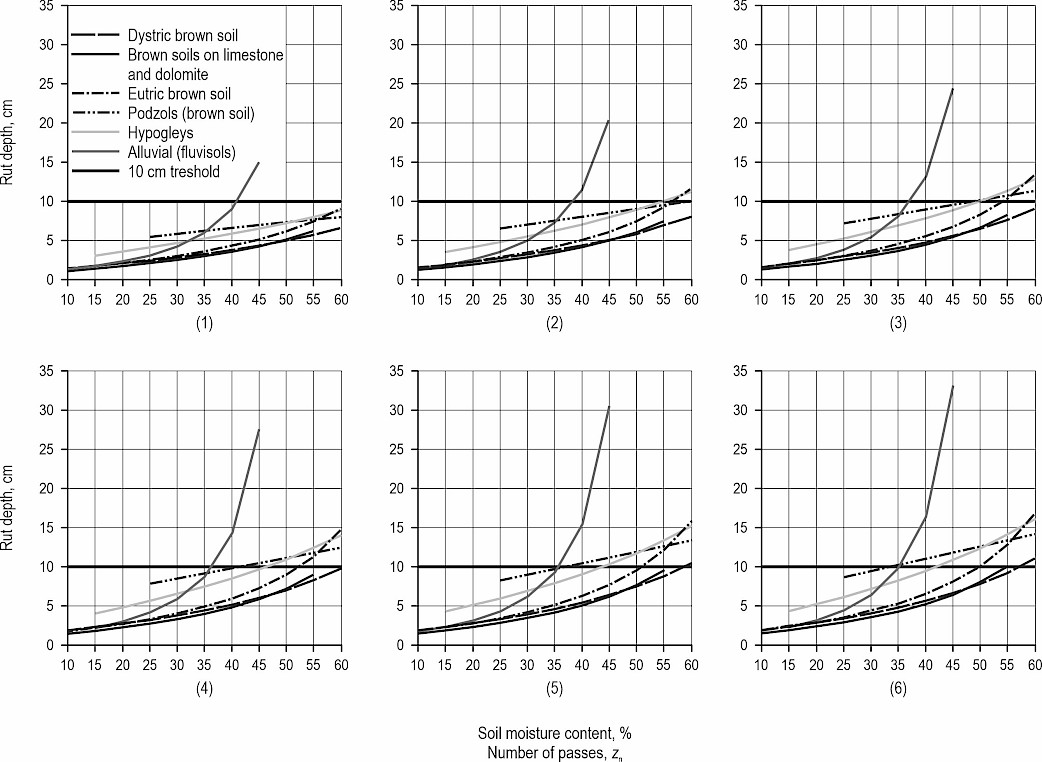
Fig. 7 Rut depth subject to soil type and soil water content for one to six passes
Alternatively, the results can be presented using harvester trail lengths to determine the longest trail length that can be used on specific soil water content to derive rut depths below 0.1 m after n passes for each soil type for the same reference values of harvest intensity. As demonstrated in Fig. 8, the safe distance for alluvial soils with 40% soil water content is 50 metres, for podzols it is 250 metres, and for all other soil types it is 300 metres or more. The precipitous decline observed in the alluvial soil profile is indicative of its heightened sensitivity to variations in soil moisture content. It has been demonstrated that other soil types exhibit more gently sloping curves, which renders them less susceptible to soil damage.
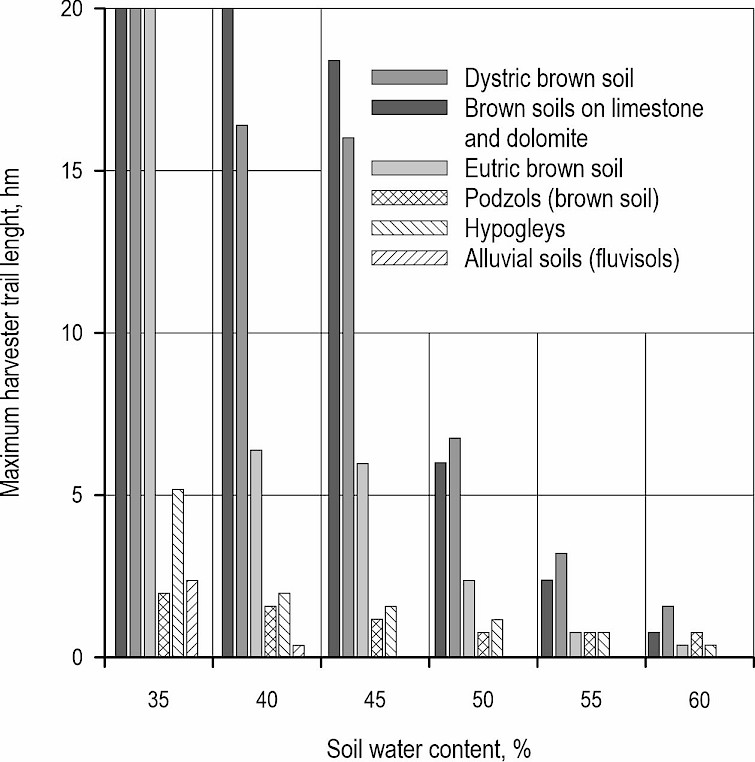
Fig. 8 Maximum harvester trail length for different soil water content levels and soil types
Table 4 shows the results of modelling rut depths for differing levels of harvest intensity (H), maximum harvester trail length (L), and nominal ground pressure (Ci). The results also indicate that rut depth on any soil type will not exceed 0.1 m when the soil can withstand a nominal ground pressure of at least 849 kPa when the harvest intensity is 400 m3 ha-1, and maximum harvester trail length is 400 m. Conversely, rut depth on any soil type will always exceed 0.1 m when when the soil cannot withstand a nominal ground pressure of 456 kPa, with the harvest intensity of 50 m3 ha-1, and maximum harvester trail length of 50 m. The 849 and 456 kPa values were derived from penetration resistance models for each soil type by adjusting the soil water content value to obtain the minimum value of Ci for the corresponding rut depth.
Table 4 Maximum rut depths in metres subject to the maximum harvester trail length (L) and harvest intensity (H) for threshold values of soil nominal ground pressure (Ci) – valid for any soil type
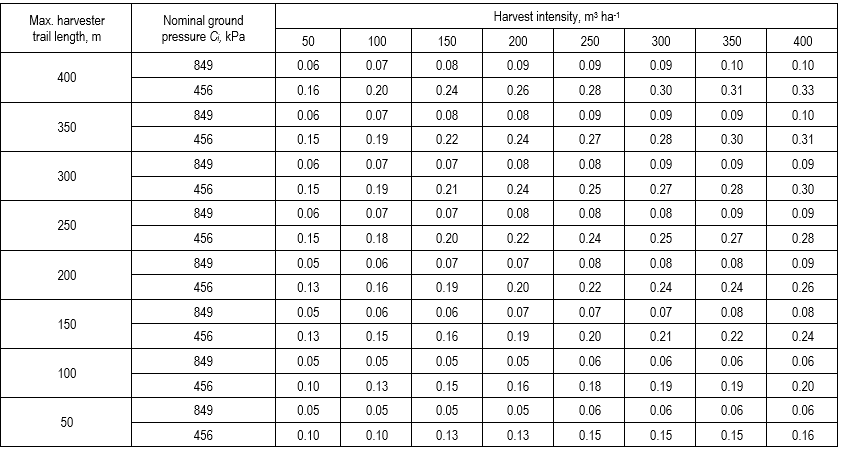
The findings indicate that logging activities may result in rut depths of less than 0.1 m when the soil water content is 40% or less, regardless of soil type. Additionally, the study found that dystric brown soil and brown soils on limestone and dolomite – two of the most common soil types that constitute approximately one-third of Slovenian forests – have a soil water content limit of 65% to produce rut depths less than 0.1 m. In practice, this indicates that approximately every third forest compartment designated for FM–CTL harvesting, irrespective of the maximum harvester trail length or harvest intensity, can be harvested in nearly all-weather conditions without surpassing the 0.1 m rut depth (for harvest intensities up to 300 m3 ha-1.
4. Discussion
The most significant outcomes of this study are the empirical models of soil penetration resistance for six types of soil that can be found in Slovenia. More than 46.7% of Slovenian forest soils can be classified in one of the six soil types. A decrease in the nominal ground pressure value has been shown to lead to an increased risk of rutting, compaction, and deformation of the soil, with all the negative consequences that this may entail. In general, the lower boundary limit for the nominal ground pressure of every tested soil type that allows safe harvesting from the perspective of soil protection is 456 kPa. When soil nominal ground pressure falls below 456 kPa, no soil type included in the analysis will be able to resist the machinery, and irreversible soil damage will ensue. It is imperative to acknowledge the pivotal function of volumetric soil water content, particularly in the context of hypogleys and podzols characterised by silt loam texture and elevated levels of organ matter (cf. Poje et al. 2020). As the water content of the soil is contingent on the duration and intensity of rainfall, the utilisation of appropriate models to calculate water content (e.g. Shang et al. 2007) can expeditiously provide insights into nominal ground pressure.
In this study, it was demonstrated that the occurrence of rutting subsequent to the implementation of FM–CTL technology can be predicted, provided that the machine properties, the volume of timber to be harvested, the maximum harvester trail length, and the soil characteristics are known. This information was subsequently incorporated into an equation (see Eq. 7) in order to facilitate the prediction of rut depth in circumstances where the three variables are known. Theoretical calculations have been conducted to determine the impact of the number of passes on soil rut depth. The findings of this study are in accordance with the results reported in Cambi et al. (2016). In order to facilitate planning and avoid extensive soil damage, it is thus important to know this parameter in advance.
This finding aligns with previous research (e.g. Saarilahti 2002), yet it contradicts other studies (e.g. Eliasson and Wästerlund 2007, Pandur et al. 2022). Alternatively, the utilisation of permanent harvester trails (lanes) has been posited as a means of facilitating greater rut depths. This approach is predicated on the premise that such trails could be utilised by a range of machinery, including skidders, as posited by Vossbrink and Horn (2004). It is evident that alternative measures, such as the implementation of slash reinforcement or the utilisation of bogie tracks, exert a significant influence on the depth of ruts, particularly in the context of sensitive soils (cf. Gerasimov and Katarov 2010).
Our results on penetration resistance for any soil type are somewhat lower than those of other studies (e.g. Poršinsky et al. 2006, Sakai et al. 2008, Ampoorter et al. 2010). Our minimum value for a modelled 0.1 m rut was 456 kPa, while other studies report 600–800 kPa and 1000–1500 kPa on average (Uusitalo et al. 2019). In a similar manner to the findings of Uusitalo et al. (2020), an exponential increase in rut depth was observed when the volumetric soil water content exceeded approximately 35% on fine-grained soils (in this case, alluvial). When considered in conjunction with the number of passes, harvest intensity and harvester trail length, it can be concluded that forest operations are recommended to be conducted during dry periods, with shorter harvester trail lengths and reduced harvest intensity. The threshold distance for allowing rut depths shallower than 0.1 m is 250 metres for all analysed soil types, with the exception of alluvial soils. As an alternative hypothesis, it is proposed that for a 100-metre harvester trail length, rut depth exceeds 0.1 metres when the number of passes is six or more, for all soil types and with 35% soil water content. Increasing the distance between harvester trails also decreases the maximum harvester length as the number of passes increases due to increased wood volume on each harvester trail (assuming constant harvest intensity).
In the study, an equation was developed to calculate the number of passes given the maximum harvester trail length, harvest intensity, harvester trail density and machine characteristics (i.e. volume of the load). The equation is theoretically grounded in the distribution of harvester trails in a given area, and road spacing in a two-way forwarding system (Akay et al. 2007). Furthermore, the known harvest intensity and volume of the forwarder load are included. It is imperative to consider the number of passes when employing the Scholander model (Eq. 2) to predict rut depth on a specific soil type within the harvesting area. In a forestry policy context, the prediction of rut depth is facilitated by the necessity for the prior marking of trees and harvester trails in situ. This approach enables work supervisors to exercise greater autonomy in selecting appropriate terrain, thereby preventing detrimental practices that could lead to the degradation of forest soils (Pezdevšek Malovrh et al. 2018). Additionally, the optimisation of the harvester trail system for a specific area to be harvested has the potential to reduce not only the soil rut depth, but also to contribute to more efficient and environmentally-friendly forest operations, with a concomitant decrease in fuel consumption (Prinz et al. 2023).
Research has demonstrated that reducing the forwarding distance would result in a decrease in rut depths on average. It is imperative to exercise particular caution in relation to soil types exhibiting reduced resistance (e.g. alluvial soils), which demonstrate heightened sensitivity to fluctuations in soil water content. It is posited that a solution to the issues posed by these soil types may be found in the increased density of permanent forest roads and skid trails, with the concomitant allowance for shorter temporary harvester trails. It is evident that the rut depth undergoes a decline in proportion to the decrease in harvest intensity. However, it is imperative to acknowledge that the quantity of residual slashes that traverse beneath the forwarder wheels concomitantly diminishes. These residual slashes are of critical importance in protecting soils with low bearing capacity, and should amount to a minimum of 20 kg m-2 (Labelle et al. 2022). According to previous studies, the presence of residual slashes is sufficient in clear-cut systems; however, this is not necessarily the case in thinnings (Labelle and Jaeger 2019). Consequently, it can be deduced that harvest intensity on soils with low bearing capacity should be higher than on soils with high bearing capacity. It is evident that a low harvest intensity will have two primary consequences. First, it will result in increased costs, and second, it will lead to greater soil damage due to a lack of tree parts available for use as slashes. Nevertheless, the results obtained are of use in predicting soil damage in advance, thus enabling the planning of the temporal and spatial distribution of forest operations. The initiation of spatial explicit tools at the regional level constitutes a fundamental prerequisite for further development. This is of particular importance in determining the number of "safe working days", i.e. days on which forest operations are permitted for any soil type.
5. Limitations and Caveats
The main limitations are found in relatively low number of included soil types. Despite the fact that the models built can aid planning forest operations for nearly half of Slovenian forests, the second half remains unknown. In order to enhance the models, it is necessary to undertake additional measurements of volumetric soil water content on the same soil types. This is of particular importance given the established correlation between soil texture and the proportion of clay particles, which have been demonstrated to have a significant impact on penetration resistance models. Furthermore, the collection of additional data on marginal soil water contents would serve to enhance the model strength.
It is evident that, given the non-empirical derivation of certain parameters and their variable levels, a more extensive scope is available for the exploration of their respective effects. None of the models under consideration incorporated the effects of other significant factors, including but not limited to terrain slope, temperature, and the driver's experience. It is recommended that future studies direct their attention to these factors, in addition to extending the scope of data collection to encompass a wider range of soil types.
6. Conclusions
The results presented herein indicate that operational planning and organisation are required to facilitate the successful integration of CTL technology into any given environment. Rut depth models, which include machine properties, the amount of timber to be harvested, the maximum harvester trail length and soil characteristics, can be used to predict potential soil damage after harvesting with CTL technology. Optimal planning of the harvest trail system is also recommended in order to protect forest soil. It has been demonstrated that soil water content and harvester trail length are found to be limiting factors, in addition to soil type.
Acknowledgments
The authors are grateful to the anonymous reviewers for their comments on earlier versions of the manuscript and to ARIS (Slovenian Research and Innovation Agency) for project funding under the title »The impact of CTL technology to forest and determination of criteria for its implementation« (V4-1624), during which data for the study were collected.
7. References
Abdi, O., Uusitalo, J., Kivinen, V-P., 2022: Logging Trail Segmentation via a Novel U-Net Convolutional Neural Network and High-Density Laser Scanning Data. Remote Sens 14(2): 349. https://doi.org/10.3390/rs14020349
Akay, A., Erdaş, O., 2019: Estimating rut depth during skidding with a rubber-tired skidder. Turkish J Forestry 8(1): 49–57. https://doi.org/10.18182/tjf.95509
Akay, A.E., Sessions, J., Aruga, K., 2007: Designing a forwarder operation considering tolerable soil disturbance and minimum total cost. J Terramechanics 44(2): 187–195. https://doi.org/10.1016/j.jterra.2006.10.001
Allman, M., Dudáková, Z., Jankovský, M., Vlčková, M., Juško, V., Tomčík, D., 2022: Soil Compaction after Increasing the Number of Wheeled Tractors Passes on Forest Soils in West Carpathians. Forests 13(1): 109. https://doi.org/10.3390/f13010109
Ampoorter, E., Van Nevel, L., De Vos, B., Hermy, M., Verheyen, K., 2010: Assessing the effects of initial soil characteristics, machine mass and traffic intensity on forest soil compaction. For Ecol Manag 260(10): 1664–1676. https://doi.org/10.1016/j.foreco.2010.08.002
Asikainen, A., Leskinen, L.A., Pasanen, K., Väätäinen, K., Anttila, P., Tahvanainen, T., 2009: Metsäkonesektorin nykytila ja tulevaisuus [The present and future of forest machine technology sector]. Working Papers of the Finnish Forest Research Institute 125, 48 p.
Aust, W.M., Blinn, C.R., 2004: Forestry best management practices for timber harvesting and site preparation in the eastern United States: An overview of water quality and productivity research during the past 20 years (1982–2002). Water Air Soil Pollut Focus 4(1): 5–36. https://doi.org/10.1023/B:WAFO.0000012828.33069.f6
Bhatnagar, S., Puliti, S., Talbot, B., Heppelmann, J.B., Breidenbach, J., Astrup, R., 2022: Mapping wheel-ruts from timber harvesting operations using deep learning techniques in drone imagery. Forestry 95(5): 698–710. https://doi.org/10.1093/forestry/cpac023
Cadei, A., Mologni, O., Röser, D., Cavalli, R., Grigolato, S., 2020: Forwarder Productivity in Salvage Logging Operations in Difficult Terrain. Forests 11(3): 341. https://doi.org/10.3390/f11030341
Cambi, M., Certini, G., Neri, F., Marchi, E., 2015: The impact of heavy traffic on forest soils: A review. For Ecol Manag 338: 124–138. https://doi.org/10.1016/j.foreco.2014.11.022
Cambi, M., Grigolato, S., Neri, F., Picchio, R., Marchi, E., 2016: Effects of Forwarder Operation on Soil Physical Characteristics: a Case Study in the Italian Alps. Croat J For Eng 37(2): 233–239.
Cao, S., 2024: Soil rutting prediction using Random Forest model. Master’s Thesis thesis. University of Helsinki, 73 p.
Costantini, A., Doley, D., 2001: Management of compaction during harvest of Pinus plantations in Queensland: III. Preliminary investigation of the potential for selected soil parameters to predict rut compaction. Aust For 64(3): 193–198. https://doi.org/10.1080/00049158.2001.10676186
Curran, M., Maynard, D., Heninger, R., Terry, T., Howes, S., Stone, D., Niemann, T., Miller, R.E., 2008: Elements and rationale for a common approach to assess and report soil disturbance. For Chron 83(6): 852–866. https://doi.org/10.5558/tfc83852-6
Duckert, D.R., Morris, D.M., Deugo, D., Duckett, S., McPherson, S., 2009: Developing site disturbance standards in Ontario: Linking Science to Forest Policy within an Adaptive Management Framework. Can J Soil Sci 89(1): 13–23. https://doi.org/10.4141/CJSS06034
Eliasson, L., Wästerlund, I., 2007: Effects of slash reinforcement of strip roads on rutting and soil compaction on a moist fine-grained soil. For Ecol Manag 252(1): 118–123. https://doi.org/10.1016/j.foreco.2007.06.037
Forest Stewardship: Planning for Beauty and Enjoyment. https://extension.psu.edu
Gerasimov, Y., Katarov, V., 2010: Effect of Bogie Track and Slash Reinforcement on Sinkage and Soil Compaction in Soft Terrains. Croat J For Eng 31(1): 35–45.
Golanbari, B., Mardani, A., Farhadi, N., Nazari Chamki, A., 2025: Applications of machine learning in predicting rut depth in off-road environments. Sci Rep 15(1): 5486. https://doi.org/10.1038/s41598-025-90054-8
Grünberg, J., Holzleitner, F., Behringer, M., Gollob, C., Kanzian, C., Katzensteiner, K., Kühmaier, M., 2025: Impacts of a fully mechanized timber harvesting system on soil physical properties after a pronounced dry period. Soil Till Res 251: 106551. https://doi.org/10.1016/j.still.2025.106551
Heppelmann, J.B., Talbot, B., Antón Fernández, C., Astrup, R., 2022: Depth-to-water maps as predictors of rut severity in fully mechanized harvesting operations. Int J For Eng 33(2): 108–118. https://doi.org/10.1080/14942119.2022.2044724
Holmström, E., Nikander, J., Backman, J., Väätäinen, K., Uusitalo, J., Jylhä, P., 2023: A multi-objective optimization strategy for timber forwarding in cut-to-length harvesting operations. Int J For Eng 34(2): 267–283. https://doi.org/10.1080/14942119.2022.2149003
Horn, R., Vossbrink, J., Peth, S., Becker, S., 2007: Impact of modern forest vehicles on soil physical properties. For Ecol Man 248(1): 56–63. https://doi.org/10.1016/j.foreco.2007.02.037
Jamaluddin, J., Kamarudin, N., Ismail, M.H., Ahmad, S.A., 2023: Optimizing timber transportation planning for timber harvesting using bees algorithm in Malaysia. J Environ Man 340: 117977. https://doi.org/10.1016/j.jenvman.2023.117977
John Deere D-Series Forwarders. D-Series Forwarders from John Deere. www.deere.com
Jones, M.F., Arp, P., 2019: Soil Trafficability Forecasting. Open J For 9(4): 296–322. https://doi.org/10.4236/ojf.2019.94017
Jourgholami, M., Majnounian, B., 2011: Effects of wheeled cable skidder on rut formation in skid trail – a case study in Hyrcanian forest. J For Res 22(3): 465–469. https://doi.org/10.1007/s11676-011-0112-9
Kankare, V., Luoma, V., Saarinen, N., Peuhkurinen, J., Holopainen, M., Vastaranta, M., 2019: Assessing feasibility of the forest trafficability map for avoiding rutting – a case study. Silva Fenn 53(3): 10197. https://doi.org/10.14214/sf.10197
Kärhä, K., Anttonen, T., Poikela, A., Palander, T., Laurén, A., Peltola, H., Nuutinen, Y., 2018: Evaluation of Salvage Logging Productivity and Costs in Windthrown Norway Spruce-Dominated Forests. Forests 9(5): 280. https://doi.org/10.3390/f9050280
Kim, I., Seo, J., Woo, H., Choi, B., 2025: Assessing Rutting and Soil Compaction Caused by Wood Extraction Using Traditional and Remote Sensing Methods. Forests 16(1): 86. https://doi.org/10.3390/f16010086
Kizha, A.R., Nahor, E., Coogen, N., Louis, L.T., George, A.K., 2021: Residual Stand Damage under Different Harvesting Methods and Mitigation Strategies. Sustainability 13(14): 7641. https://doi.org/10.3390/su13147641
Korpunen, H., Nuutinen, Y., Jylhä, P., Eliasson, L., Granhus, A., Laitila, J., Hoffmann, S., Muhonen, T., 2025: Harvesting of Continuous Cover Forests. In Continuous Cover Forestry in Boreal Nordic Countries, eds. P. Rautio, J. Routa, S. Huuskonen, E. Holmström, J. Cedergren, C. Kuehne, 109–124 p. Cham: Springer Nature Switzerland. https://doi.org/10.1007/978-3-031-70484-0_6
Košir, B., 2010: Gozdna tla kot usmerjevalec tehnologij pridobivanja lesa. Biotechnical Faculty, Ljubljana.
Krč, J., Beguš, J., Primožič, J., Levstek, J., Papler-Lampe, V., Klun, J., Mihelič, M., 2014: Vodila dobrega ravnanja pri strojni sečnji. Biotehniška fakulteta, Oddelek za gozdarstvo in obnovljive gozdne vire, 38 p.
Kunca, A., Zúbrik, M., Galko, J., Vakula, J., Leontovyč, R., Konôpka, B., Nikolov, C., Gubka, A., Longauerová, V., Maľová, M., Rell, S., Lalík, M., 2019: Salvage felling in the Slovak Republic’s forests during the last twenty years (1998–2017). Cent Eur For J 65(1):3–11. https://doi.org/10.2478/forj-2019-0007
Labelle, E.R., Hansson, L., Högbom, L., Jourgholami, M., Laschi, A., 2022: Strategies to Mitigate the Effects of Soil Physical Disturbances Caused by Forest Machinery: a Comprehensive Review. Curr Forestry Rep 8(1): 20–37. https://doi.org/10.1007/s40725-021-00155-6
Labelle, E.R., Jaeger, D., 2019: Management Implications of Using Brush Mats for Soil Protection on Machine Operating Trails during Mechanized Cut-to-Length Forest Operations. Forests 10(1): 19. https://doi.org/10.3390/f10010019
Lahtinen, M., 2011: The Global Challenges of Harvesting and how the CTL Method can Respond to Them. Doctoral thesis. Mikkeli University of Applied Sciences, 46 p.
Latterini, F., Venanzi, R., Papa, I., Đuka, A., Picchio, R., 2024: A meta-analysis to evaluate the reliability of depth-to-water maps in predicting areas particularly sensitive to machinery-induced soil disturbance. Croat J For Eng 45(2): 433–444. https://doi.org/10.5552/crojfe.2024.2559
Lundbäck, M., Häggström, C., Nordfjell, T., 2021: Worldwide trends in methods for harvesting and extracting industrial roundwood. Int J For Eng 32(3): 202–215. https://doi.org/10.1080/14942119.2021.1906617
Mederski, P.S., Borz, S.A., Đuka, A., Lazdiņš, A., 2021: Challenges in Forestry and Forest Engineering – Case Studies from Four Countries in East Europe. Croat J For Eng 42(1): 117–134. https://doi.org/10.5552/crojfe.2021.838
Mohtashami, S., 2022: GIS-based decision support systems to minimise soil impacts in logging operations. PhD thesis. SLU, 168 p. https://doi.org/10.54612/a.qq3cqbcknd
Mohtashami, S., Eliasson, L., Jansson, G., Sonesson, J., 2017: Influence of soil type, cartographic depth-to-water, road reinforcement and traffic intensity on rut formation in logging operations: a survey study in Sweden. Silva Fenn 51(5): 2018. https://doi.org/10.14214/sf.2018
Mohtashami, S., Thierfelder, T., Eliasson, L., Lindström, G., Sonesson, J., 2022: Use of Hydrological Models to Predict Risk for Rutting in Logging Operations. Forests 13(6): 901. https://doi.org/10.3390/f13060901
Moskalik, T., Borz, S.A., Dvořák, J., Ferencik, M., Glushkov, S., Muiste, P., Lazdiņš, A., Styranivsky, O., 2017: Timber Harvesting Methods in Eastern European Countries: a Review. Croat J For Eng 38(2):231–241.
Nokian Tyres Forest King TRS 2 forestry tires / Nokian Tyres. 2020. Nokian Tyres. www.nokiantyres.com
Nordlund, A., Ring, E., Högbom, L., Bergkvist, I., 2013: Beliefs among Formal Actors in the Swedish Forestry Related to Rutting Caused by Logging Operations. Skogforst, Uppsala, 28 p.
Ovaskainen, H., Riekki, K., 2022: Computation of Strip Road Networks Based on Harvester Location Data. Forests 13(5): 782. https://doi.org/10.3390/f13050782
Owende, P.M.O., Lyons, J., Haarlaa, R., Peltola, A., Spinelli, R., Molano, J., Ward, S.M., 2002: Operations protocol for eco-efficient harvesting on sensitive sites. Ecowood, 74 p.
Pandur, Z., Kopseak, H., Šušnjar, M., Landekić, M., Šporčić, M., Bačić, M., 2022: Effect of forwarder multipassing on forest soil parameters changes. iForest 15(6): 476. https://doi.org/10.3832/ifor4138-015
Pezdevšek Malovrh, Š., Mihelič, M., Krč, J., 2018: Varstvo gozdnih tal z vidika zakonodaje : ali obstajajo omejitve pri rabi sodobnih tehnologij? Acta Silvae et Ligni 115: 43–56. http://doi.org/10.20315/ASetL.115.4
Picchio, R., Mederski, P.S., Tavankar, F., 2020: How and How Much, Do Harvesting Activities Affect Forest Soil, Regeneration and Stands? Curr Forestry Rep 6(2): 115–128. https://doi.org/10.1007/s40725-020-00113-8
Poje, A., Mihelič, M., Leban, V., 2019: Analiza strokovnega ocenjevanja poškodovanosti gozdnih tal. Gozdarski vestnik 1(77): 3–20.
Poje, A., Mihelič, M., Leban, V., 2021: Usklajena merila sprejemljive poškodovanosti gozdnih tal – preverjanje ustreznosti med gozdarskimi strokovnjaki. Acta Silvae et Ligni 124: 43–54. https://doi.org/10.20315/ASetL.124.4
Poje, A., Zore, P., Suhadolc, M., 2020: Ocena ranljivosti gozdnih tal na zbijanje zaradi mehanizacije - preizkus in nadgradnja terenske metode blatne kepe. Acta Silvae et Ligni 123: 43–52. https://doi.org/10.20315/ASetL.123.4
Poršinsky, T., Sraka, M., Stankić, I., 2006: Comparison of two approaches to soil strength classifications. Croat J For Eng 27(1): 17–26.
Prinz, R., Mola-Yudego, B., Ala-Ilomäki, J., Väätäinen, K., Lindeman, H., Talbot, B., Routa, J., 2023: Soil, Driving Speed and Driving Intensity Affect Fuel Consumption of Forwarders. Croat J For Eng 44(1):31–43. https://doi.org/10.5552/crojfe.2023.1725
Reeves, D.A., Reeves, M.C., Abbott, A.M., Page-Dumroese, D.S., Coleman, M.D., 2012: A detrimental soil disturbance prediction model for ground-based timber harvesting. Can J For Res 42(5): 821–830. https://doi.org/10.1139/X2012-034
Saarilahti, M., 2002: Soil interaction model : Appendix Report No 3. : Evaluation of the WES-method in assessing the trafficability of terrain and the mobility of forest tractors. Part 2: WES mobility models.
Sakai, H., Nordfjell, T., Suadicani, K., Talbot, B., Bøllehuus, E., 2008: Soil Compaction on Forest Soils from Different Kinds of Tires and tracks and Possibility of Accurate Estimate. Croat J For Eng 29(1): 15–27.
Salmivaara, A., Holmström, E., Kulju, S., Ala-Ilomäki, J., Virjonen, P., Heikkonen, J., Launiainen, S., 2024: High-resolution harvester data for estimating rolling resistance and forest trafficability. Eur J Forest Res 143(6): 1641–1656. https://doi.org/10.1007/s10342-024-01717-6
Salmivaara, A., Launiainen, S., Perttunen, J., Nevalainen, P., Pohjankukka, J., Ala-Ilomäki, J., Sirén, M., Laurén, A., Tuominen, S., Uusitalo, J., Pahikkala, T., Heikkonen, J., Finér, L., 2020: Towards dynamic forest trafficability prediction using open spatial data, hydrological modelling and sensor technology. Forestry 93(5): 662–674. https://doi.org/10.1093/forestry/cpaa010
Schönauer, M.J., 2022: Prediction of forest soil trafficability by topography-based algorithms and in-situ test procedures. Dissertation thesis. Georg-August-Universität Göttingen, 135 p.
Shang, K.Z., Wang, S.G., Ma, Y.X., Zhou, Z.J., Wang, J.Y., Liu, H.L., Wang, Y.Q. 2007: A scheme for calculating soil moisture content by using routine weather data. Atmos Chem Phys 7(19): 5197–5206. https://doi.org/10.5194/acp-7-5197-2007
Siafali, E., Tsioras, P.A., 2024: An Innovative Approach to Surface Deformation Estimation in Forest Road and Trail Networks Using Unmanned Aerial Vehicle Real-Time Kinematic-Derived Data for Monitoring and Maintenance. Forests 15(1): 212. https://doi.org/10.3390/f15010212
Sirén, M., Ala-Ilomäki, J., Lindeman, H., Uusitalo, J., Kiilo, K.E.K., Salmivaara, A., Ryynänen, A. 2019a: Soil disturbance by cut-to-length machinery on mid-grained soils. Silva Fenn 53(2): 10134. https://doi.org/10.14214/sf.10134
Sirén, M., Salmivaara, A., Ala-Ilomäki, J., Launiainen, S., Lindeman, H., Uusitalo, J., Sutinen, R., Hänninen, P., 2019b: Predicting forwarder rut formation on fine-grained mineral soils. Scand J For Res 34(2): 145–154. https://doi.org/10.1080/02827581.2018.1562567
Soil Survey Division Staff, 2017: Soil Survey Manual. United States Department of Agriculture.
Šporčić, M., Landekić, M., Šušnjar, M., Pandur, Z., Bačić, M., Mijoč, D., 2024: Shortage of Labour Force in Forestry of Bosnia and Herzegovina – Forestry Experts’ Opinions on Recruiting and Retaining Forestry Workers. Croat J For Eng 45(1): 183–197. https://doi.org/10.5552/crojfe.2024.2345
Thees, O., Olschewski, R., 2017: Physical soil protection in forests - insights from production-, industrial- and institutional economics. For Policy Econ 80: 99–106. https://doi.org/10.1016/j.forpol.2017.01.024
Urbančič, M., Simončič, P., Prus, T., Kutnar, L., 2005: Atlas gozdnih tal Slovenije. Ljubljana: Zveza gozdarskih društev Slovenije, Gozdarski inštitut Slovenije, 100 p.
Ursić, B., Vusić, D., Papa, I., Poršinsky, T., Zečić, Ž., Đuka, A., 2022: Damage to Residual Trees in Thinning of Broadleaf Stand by Mechanised Harvesting System. Forests 13(1): 51. https://doi.org/10.3390/f13010051
Uusitalo, J., Ala-Ilomäki, J., Lindeman, H., Toivio, J., Siren, M., 2019: Modelling soil moisture – soil strength relationship of fine-grained upland forest soils. Silva Fenn 53(1): 10050. https://doi.org/10.14214/sf.10050
Uusitalo, J., Ala-Ilomäki, J., Lindeman, H., Toivio, J., Siren, M., 2020: Predicting rut depth induced by an 8-wheeled forwarder in fine-grained boreal forest soils. Ann For Sci 77(2): 42. https://doi.org/10.1007/s13595-020-00948-y
Uusitalo, J., Salomäki, M., Ala-Ilomäki, J., 2015: The Effect of Wider Logging Trails on Rut Formations in the Harvesting of Peatland Forests. Croat J For Eng 36(1): 125–130.
Vennik, K., Keller, T., Kukk, P., Krebstein, K., Reintam, E., 2017: Soil rut depth prediction based on soil strength measurements on typical Estonian soils. Biosyst Eng 163: 78–86. https://doi.org/10.1016/j.biosystemseng.2017.08.016
Vennik, K., Kukk, P., Krebstein, K., Reintam, E., Keller, T., 2019: Measurements and simulations of rut depth due to single and multiple passes of a military vehicle on different soil types. Soil Till Res 186: 120–127. https://doi.org/10.1016/j.still.2018.10.011
Visser, R., Obi, O.F., 2021: Automation and Robotics in Forest Harvesting Operations: Identifying Near-Term Opportunities. Croat J For Eng 42(1): 13–24. https://doi.org/10.5552/crojfe.2021.739
Visser, R., Stampfer, K., 2015: Expanding Ground-based Harvesting onto Steep Terrain: A Review. Croat J For Eng 36(2): 321–331.
Vossbrink, J., Horn, R., 2004. Modern forestry vehicles and their impact on soil physical properties. Eur J Forest Res 123(4): 259–267. https://doi.org/10.1007/s10342-004-0040-8
Zahradník, P., Zahradníková, M., 2019: Salvage felling in the Czech Republic‘s forests during the last twenty years. Cent Eur For J 65(1): 12–20. https://doi.org/10.2478/forj-2019-0008
Zore, P., 2025: Poškodbe tal po prehodu stroja za sečnjo v odvisnosti od lastnosti tal. Master thesis. University of Ljubljana, Biotechnical faculty, 62 p.
© 2026 by the authors. Submitted for possible open access publication under the
terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Authors’ addresses:
Assist. prof. Anton Poje, PhD
e-mail: anton.poje@bf.uni-lj.si
Prof. Janez Krč, PhD
e-mail: janez.krc@bf.uni-lj.si
Vasja Leban, PhD *
e-mail: vasja.leban@bf.uni-lj.si
University of Ljubljana
Biotechnical Faculty
Department of Forestry and Renewable Forest Resources
Večna pot 83
1000, Ljubljana
SLOVENIA
* Corresponding author
Received: October 20, 2023
Accepted: September 23, 2025
Original scientific paper