
Logging Mats and Logging Residue as Ground Protection during Forwarder Traffic along Till Hillslopes
doi: 10.5552/crojfe.2021.875
volume: 42, issue:
pp: 18
- Author(s):
-
- Ring Eva
- Andersson Mikael
- Hansson Linnea
- Jansson Gunnar
- Högbom Lars
- Article category:
- Original scientific paper
- Keywords:
- boreal, brush mat, clearcutting, moraine, rutting, soil
Abstract
HTML
Forest soils in Northern Europe are generally trafficked by forest machinery on several occasions during a forest rotation. This may create ruts (wheel tracks), which could increase sediment transport to nearby surface water, reduce recreational value, and affect tree growth. It is therefore important to reduce soil disturbance during off-road forest transportation. In this study, rut depth was measured following forwarder traffic on study plots located along four harvested till hillslopes in Northern Sweden with drier soil conditions uphill and wet conditions downhill. The treatments included driving 1) using no ground protection, 2) on logging residue (on average, 38–50 kg m–2) and 3) on logging mats measuring 5×1×0.2 m. The hillslopes contain areas with a high content of boulders, stones, and gravel as well as areas with a significant content of silt. Six passes with a laden forwarder with four bogie tracks were performed. On the plots with ground protection, the application of logging residue and the application and removal of logging mats necessitated additional passes. Rut depth was measured using two methods: 1) as the difference in elevation between the interpolated original soil surface and the surface of the rut using GNSS positioning (Global Navigation Satellite Systems), and 2) manually with a folding rule from an aluminium profile, placed across the rut, to the bottom of the rut. The two methods generally gave similar results. Driving without ground protection in the upper part of the hillslopes generated ruts with depths <0.2 m. Here, the rut depth was probably modified by the high content of boulders and stones in the upper soil and drier soil conditions. In the lower part of the hillslopes, the mean rut depth ranged from 0.21 to 0.34 m. With a few exceptions, driving on logging residue or logging mats prevented exposure of mineral soil along the entire hillslope. Soil disturbance can thus be reduced by acknowledging the onsite variability in ground conditions and considering the need for ground protection when planning forest operations.
Logging Mats and Logging Residue as Ground Protection during Forwarder Traffic along Till Hillslopes
Eva Ring, Mikael Andersson, Linnea Hansson, Gunnar Jansson, Lars Högbom
Abstract
Forest soils in Northern Europe are generally trafficked by forest machinery on several occasions during a forest rotation. This may create ruts (wheel tracks), which could increase sediment transport to nearby surface water, reduce recreational value, and affect tree growth. It is therefore important to reduce soil disturbance during off-road forest transportation. In this study, rut depth was measured following forwarder traffic on study plots located along four harvested till hillslopes in Northern Sweden with drier soil conditions uphill and wet conditions downhill. The treatments included driving 1) using no ground protection, 2) on logging residue (on average, 38–50 kg m–2) and 3) on logging mats measuring 5×1×0.2 m. The hillslopes contain areas with a high content of boulders, stones, and gravel as well as areas with a significant content of silt. Six passes with a laden forwarder with four bogie tracks were performed. On the plots with ground protection, the application of logging residue and the application and removal of logging mats necessitated additional passes. Rut depth was measured using two methods: 1) as the difference in elevation between the interpolated original soil surface and the surface of the rut using GNSS positioning (Global Navigation Satellite Systems), and 2) manually with a folding rule from an aluminium profile, placed across the rut, to the bottom of the rut. The two methods generally gave similar results. Driving without ground protection in the upper part of the hillslopes generated ruts with depths <0.2 m. Here, the rut depth was probably modified by the high content of boulders and stones in the upper soil and drier soil conditions. In the lower part of the hillslopes, the mean rut depth ranged from 0.21 to 0.34 m. With a few exceptions, driving on logging residue or logging mats prevented exposure of mineral soil along the entire hillslope. Soil disturbance can thus be reduced by acknowledging the onsite variability in ground conditions and considering the need for ground protection when planning forest operations.
Keywords: boreal, brush mat, clearcutting, moraine, rutting, soil
1. Introduction
Today, forestry is mechanized in many parts of the world. In Sweden, all large-scale logging operations and site preparation are carried out using forest machinery. Therefore, forest stands are repeatedly subjected to traffic during a rotation period. Driving over forest soils with forest machinery often creates visible ruts (wheel tracks) that range from superficial imprints of the tire tread or bogie tracks in the topsoil layer to furrows over 50 cm deep that extend into the mineral soil. Rutting can increase soil compaction and erosion, change hydrological pathways and increase hydrological connectivity to surface water (Croke and Hairsine 2006, Cambi et al. 2015). Soil compaction can also occur on coarse-textured till soils in hydrologic recharge areas (Hanssonet al. 2018). The degree of soil compaction caused by forest transportation depends on the ground pressure, vehicle vibrations, slope inclination, number of passes, soil organic matter, soil parent material and texture, and soil-water content (Wronski and Murphy 1994, Kozlowski 1999, Williamson and Neilsen 2000, Cambiet al. 2015, Toivioet al. 2017). Soil compaction may in turn affect tree growth, vegetation composition, water infiltration, soil-water content, soil structure, surface runoff, gas emissions, soil temperature, and net nitrification (Kozlowski 1999, Tanet al. 2005, Cambiet al. 2015, Hanssonet al. 2018, Hansson et al. 2019).
Ruts that expose mineral soil may increase the export of suspended solids to surface water (Jourgholami et al. 2017). An elevated export of suspended solids can be harmful to aquatic organisms, and excessive sedimentation damages riverine habitats (Wood and Armitage 1997, Österling et al. 2010). Deep ruts running near or across wet areas may act like ditches, which could alter local hydrological conditions. A stream at a monitoring site in Sweden was temporarily dammed by a machine operating trail running across it, and elevated concentrations of methyl-mercury were subsequently recorded (Munthe and Hultberg 2004). Driving on forest land may thus affect adjacent ecosystems in addition to the soil below and adjacent to the ruts.
On soils with low inherent bearing capacity, logging operations should ideally be performed on frozen ground. The effects of predicted climatic changes on off-road forest transportation remain uncertain, but a modelling study conducted in Finland suggests that conditions may be worsened by increases in wintertime soil-water content and reduced soil frost (Kellomäkiet al. 2010). The projected effects of climate change on soil temperature in snow-dominated regions are complex (Jungqvistet al. 2014) and mitigation measures other than driving on frozen ground are needed to reduce rutting. The use of logging residue for reinforcement generally mitigates soil compaction and rutting, but the effect depends on the quantity and quality of the residue, the number of passes, the soil-moisture content, and possibly the soil type (McDonald and Seixas 1997, Eliasson and Wästerlund 2007, Gerasimov and Katarov 2010, Labelle and Jaeger 2012, Labelle et al. 2015, Poltorak et al. 2018).
In cut-to-length logging systems, which are the common logging systems in Sweden, logging is performed with a harvester and a forwarder, the latter of which can weigh up to about 40 Mg when fully laden. Efforts to reduce the negative impacts of forest transportation have intensified in recent years (Keskitaloet al. 2016), resulting in the development of methods for the systematic design of strip-road networks in Swedish forestry (inter alia, https://storaensoskog.se/rattmetod/), increased use of depth-to-water maps for identifying sensitive wet areas (Laudon et al. 2016), and wider use of logging residue, corduroy bridges, and portable logging mats for ground protection. However, even with thorough preparatory planning, local weather can quickly change onsite conditions, making off-road forest transportation a delicate and demanding task. Further development of methods, technical aids, and forest machinery is therefore needed to reduce soil compaction and rutting.
This work examines rutting caused by driving a laden forwarder along four till hillslopes with and without applying ground protection (Ring et al. 2020). Till soils cover about 75% of Sweden’s land area (Fredén 1994). On average 43% of the soil volume consists of stones and boulders in the upper 30 cm of till soils on forest land in Sweden (Stendahl et al. 2009). Previous investigations at the study sites showed that also stony till soils can be compacted by forwarder traffic (Hansson et al. 2018). Moreover, the volumetric water content of the soil four to five years after driving (without ground protection) was highest in wheel tracks and lowest between tracks; this finding was corroborated by the species composition in the wheel tracks (Hansson et al. 2019). Rutting also occurred outside the wet areas indicated on depth-to-water maps (Ågrenet al. 2015). Similarly, Mohtashami et al. (2017) found that the DTW index alone did not predict rutting at 16 logging sites in Sweden.
The aim of this study was to provide information that could guide the planning of forest transportation on till soils in undulating terrain of the type found across much of Sweden, to avoid deep rutting into the mineral soil. Our main hypotheses were that:
Þ rut depth caused by forwarder traffic increases in the downhill direction because the soil water content increases and the soils become increasingly fine-textured
Þ using logging residue or logging mats for ground protection reduces deep rutting.
Additionally, a method for determining rut depth based on positioning the soil surface using a GNSS receiver was evaluated against manual measurements. To our knowledge, this is the first study where logging mats have been evaluated as ground protection on forest land. Moreover, studies of soil disturbance caused by forest transportation on till soils are rare.
2. Materials and Methods
2.1 Site Description
Two field sites were established on four till hillslopes in northern Sweden (Fig. 1) (Ringet al. 2020): 294 Rotflakamyran and 296 Trågalidsberget (hereafter referred to by name) (Table 1). The mean annual air temperature and precipitation in this region are 1–2°C and 600–700 mm, respectively (SMHI 2019ab). The soil type was orthic (haplic) podzol according to the FAO-UNESCO soil classification system (Hansson et al. 2018). In the lowest part of the hillslopes, the groundwater table was shallow. The mean hillslope inclination ranged from 4 to 8%. The Rotflakamyran site was covered by mixed stands of mainly Scots pine (Pinus sylvestris L.) and Norway spruce (Picea abies (L.) H. Karst), while Norway spruce was the main tree species at Trågalidsberget (Table 1). In general, the mean stem density at Trågalidsberget was higher than that at Rotflakamyran but the mean stump diameter was lower.
To avoid driving on the study plots before treatment, the study plots were established before logging, in areas without visual signs of former traffic. During logging, the movements of the harvester and forwarder were concentrated along extraction routes running between the plots, which were reinforced with a thick layer of logging residue. The logging residue on these routes was left permanently on site, while any logging residue on the study plots was removed before treatment. More information about the sites is presented in Ring et al. (2020).
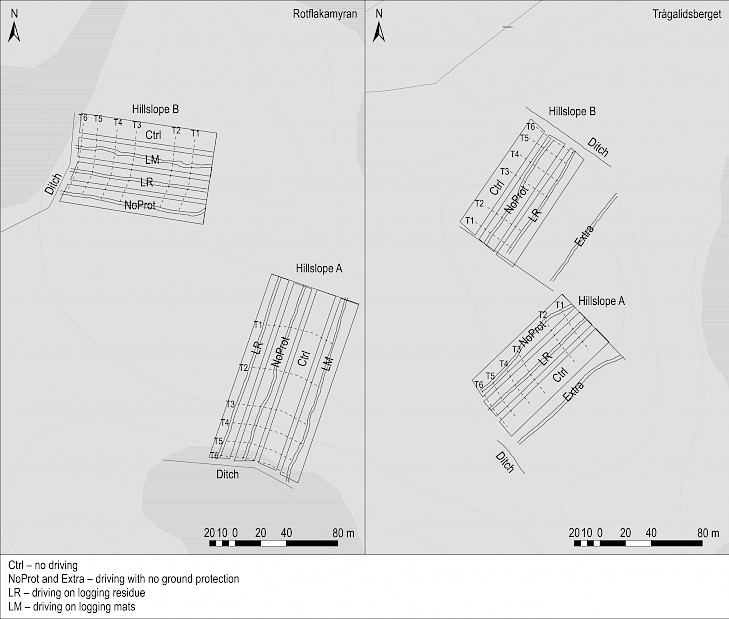
Fig. 1 Maps of 294 Rotflakamyran and 296 Trågalidsberget sites showing the study plots subjected to different driving regimes with a laden forwarder. The two parallel solid lines on the plots show the wheel tracks. During data analysis, a common uphill start line was defined for the plots in each block (solid lines). T1–T6 show transects 1–6 used for soil sampling. The ditches are located downhill from the plots. Only ditch reaches located near the plots are shown. © Lantmäteriet
Table 1 Description of Rotflakamyran and Trågalidsberget sites. SD – standard deviation, LR – logging residue
|
Rotflakamyran |
Trågalidsberget |
|||
|
Latitude, longitude |
64°32.5’ N, 20°4.5’ E |
64°19.3’N, 20°35.7’ E |
||
|
Date of harvest |
Dec. 2011 |
Feb. 2012 |
||
|
Date of replanting1 |
June 2014 |
June 2014 |
||
|
Treatments: Driving a laden forwarder on clear-cut hillslopes |
6 passes with no ground protection |
6 passes with no ground protection |
||
|
6 passes on logging residue2 |
6 passes on logging residue2 |
|||
|
6 passes on logging mats2 |
– |
|||
|
No traffic (control) |
No traffic (control) |
|||
|
Weight of forwarder with four bogie tracks, Mg |
23.3 |
23.3 |
||
|
Timber load carried by forwarder, Mg |
11.4 |
ca. 9.5 |
||
|
Weight of laden forwarder, Mg |
34.7 |
32.8 |
||
|
Date of treatment |
Hillslope A |
Hillslope B |
Hillslope A |
Hillslope B |
|
7–8 June 2012 |
11 June 2012 |
19 June 2013 |
18 June 2013 |
|
|
Length of study plots, from start line, m |
143–149 |
105–111 |
99–105 |
99–100 |
|
Mean amount of LR applied for protection, kg m-2 |
45 |
38 |
50 |
38 |
|
The harvested stands3 |
||||
|
Tree species composition, % of total no. of trees |
||||
|
Pinus sylvestris L. |
40 |
47 |
2 |
3 |
|
Picea abies (L.) H. Karst |
54 |
52 |
94 |
93 |
|
Betula spp. |
6 |
1 |
4 |
4 |
|
Stem density, stems ha-1 |
368 |
375 |
667 |
751 |
|
Mean stump diameter (SD), m |
0.33 (0.10) |
0.32 (0.089) |
0.25 (0.11) |
0.25 (0.10) |
|
1 Scots pine seedlings were planted on study plots without site preparation 2 Application of LR and application and removal of logging mats resulted in additional passes 3 Data from a stump inventory in June 2012 (Ring et al.2020). The values represent the summed area of all plots except the control plot on Rotflakamyran hillslope A |
||||
2.2 Study Design
The study used a randomized block design with two hillslopes (blocks) hosting three or four study plots each (i.e. treatments) (Fig. 1). The treatments involved driving a laden forwarder along clear-cut hillslopes with or without ground protection (Table 1). The ground protection used was logging residue or logging mats consisting of five planed logs mounted together, measuring approx. 5×1×0.2 m and weighing 0.5–0.6 Mg. The logging residue at Rotflakamyran originated from the harvested stand and had been stored in covered piles for about half a year. At Trågalidsberget, treatment had to be postponed by one year. Therefore, residue from another cutting, harvested in the spring of 2013, was transported to Trågalidsberget and stored in uncovered piles for about two months before application. This residue originated from both Norway spruce and Scots pine.
Since there was room for additional driving on the hillslopes at Trågalidsberget, controlled driving without ground protection was also performed on two temporary plots, denoted »Extra A« and »Extra B« (Fig. 1). These plots were not part of the randomized block design but were trafficked by the same laden forwarder on the 18th (Extra A) and 19th (Extra B) of June 2013. Extra A and B were subjected to four and six passes, respectively.
2.3 Driving Treatments
After applying logging residue, logging mats, or no ground protection, a total of six passes were made with a laden forwarder. The forwarder was an eight-wheeled John Deere 1410D unit with 710 mm wide tires and tire pressures of 350 kPa for the tractor and 500 kPa for the wood bunk. Bogie tracks were mounted on both the front (Olofsfors ECO-TRACKS) and rear (Clark Terra Lite) wheel pairs. The same forwarder was used at both sites and was operated by the same person. One pass was defined as a one-way trip downhill or uphill. Two passes were performed at a time, starting at the top of the hillslope, stopping briefly on the downhill short side, and then driving uphill again. At Rotflakamyran, the forwarder was driven forward downhill and reversed uphill. At Trågalidsberget, the forwarder was driven in reverse downhill and forward uphill to avoid getting stuck at the lowest part of hillslope B. Due to severe rutting in two of the plots, the driving distances were shortened as follows:
Rotflakamyran hillslope B, no ground protection:
pass 1: full distance (111 m) down the hillslope
pass 2: the forwarder got stuck 10–15 m from the downhill short side, at which point the logs were unloaded, allowing the forwarder to drive the remaining distance up the slope (resulting in a 5.5% reduction of the total load on this section)
passes 3–6: performed with the laden forwarder on the upper ca. 80 m of the study plot
Trågalidsberget hillslope A, no ground protection:
passes 1–2: full distance (99 m)
passes 3–4: performed on the upper ca. 94 m
passes 5–6: performed on the upper ca. 50 m.
Additional driving was performed while applying the ground protection. The protection was initially applied uphill and then extended downhill. To apply protection, the machine operator filled the wood bunk with logging residue or logging mats stored outside the study plots, used the boom-mounted grip to place residue or a mat from the wood bunk in front of each of the front wheels, moved forward onto the newly deposited protection, then stopped and placed another mat or grip-full of residue on the ground, and so on. A trail with ground protection was thus created along the plot. The machine operator was instructed to apply the logging residue evenly over the length of the study plot, and to deposit as much material as he considered necessary to avoid rutting in the wet part downhill (Fig. 2).
After six passes with the forwarder, the logging residue used for protection was left on the ground while the logging mats were removed, starting from the lower end of the plots. The number of passes needed to apply and remove ground protection was thus greatest in the upper parts of the plots and lowest at the bottom. In the plots treated with logging residue, the maximum number of additional passes (i.e. passes across the first section uphill) was 20 and 14 for hillslopes A and B, respectively, at Rotflakamyran, and 12 and 10 for hillslopes A and B, respectively, at Trågalidsberget. Application and removal of the logging mats at Rotflakamyran resulted in 12 and 8 extra passes across the first section on hillslopes A and B, respectively.
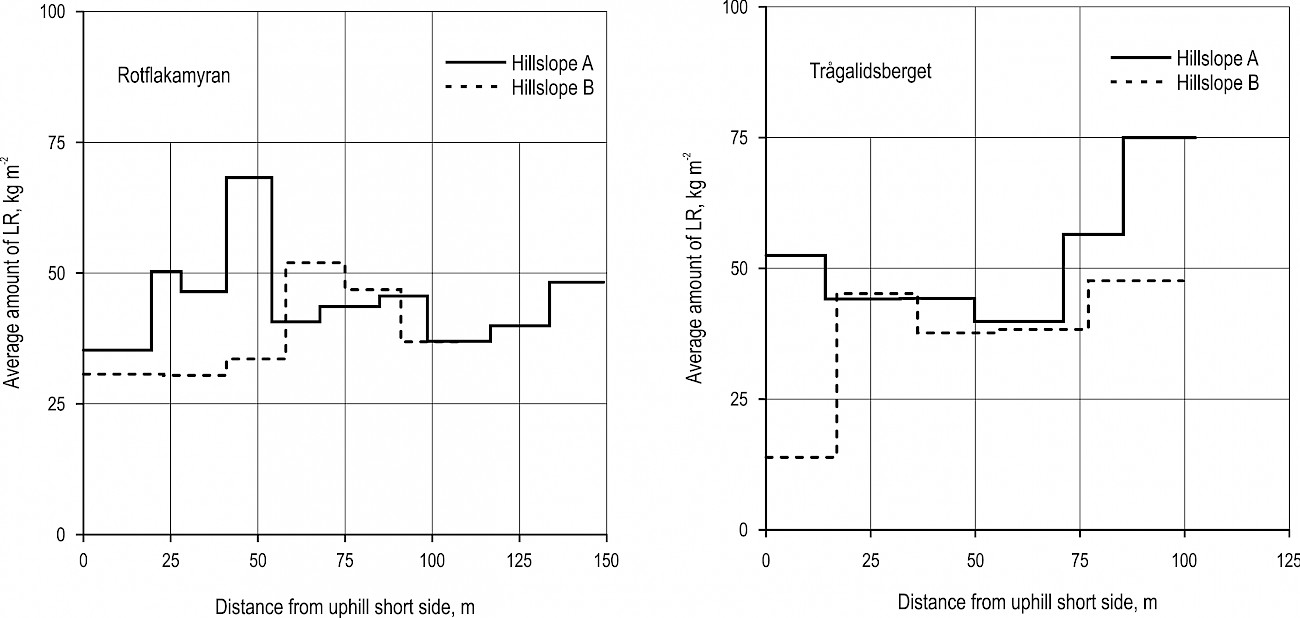
Fig. 2 Average amounts of logging residue (LR) deposited on different sections of hillslopes at Rotflakamyran (left panel) and Trågalidsberget (right panel). The distance covered by each wood bunk of residue was measured. The average amount was calculated from the weight of LR, measured with the forwarder wood bunk scale, and the covered area was obtained from GNSS positioning data
2.4 Rut Depth
2.4.1 GNSS Method
Rut depth was assessed using GNSS positioning (Global Navigation Satellite Systems) data acquired with a handheld Topcon GRS-1 GNSS receiver (http://www.topconpositioning.com/) using a fixed RTK solution. Registration of the x-, y- and z-position of the soil surface was carried out between 13 September and 15 October 2013 at Rotflakamyran (i.e. 15–16 months after treatment) and between 17 September and 18 October 2013 at Trågalidsberget (i.e. 3–4 months after treatment). Complementary registration of the undisturbed ground surface adjacent to the ruts was conducted on 19–20 November 2014 in the plots without ground protection at Rotflakamyran hillslope A and Extra B at Trågalidsberget.
GNSS data were acquired using automatic registration at a fixed interval of 0.3 m by walking continuously along the study plot holding the GNSS receiver, which was mounted on a 2 m rover pole. The tip of the pole was held in contact with the soil surface (for undisturbed soil, this was the upper surface of mosses or lichens) while walking. Registration was generally performed along five lines in each plot: in the left and right ruts, between the ruts, and on undisturbed soil adjacent to the left and right ruts. The rut depth (d) for each GNSS point in the ruts was calculated as:
To correct for the small variation in the locations of the upper short sides of the study plots, a common start line was defined for each hillslope using ArcGIS Desktop 10.5 (Fig. 1). All data are presented in terms of perpendicular distances from this start line. The left and right ruts were defined from the start line looking downhill (Fig. 3).
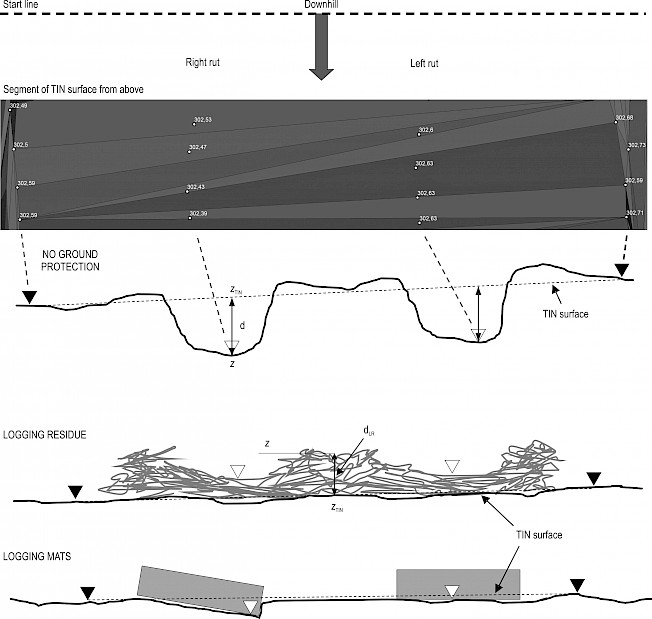
Fig. 3 Schematic cross sections of the ruts in the study plots with no ground protection, logging residue, and logging mats. The rut depth (d) for GNSS points in ruts ( ) was calculated from the bottom of the rut to the estimated original soil surface (TIN surface) above (or below) the point; the height of the original soil surface was interpolated using Triangular Irregular Networks (TIN): GNSS point on undisturbed ground, dLR: depth of logging residue
2.4.2 Manual Measurements
Rut depth was measured manually where deep rutting had occurred, i.e. where mineral soil was exposed on the side and bottom of the rut. The rut depth was set to 0 cm when driving had only compacted the organic layer and the upper mineral soil but ruts were clearly visible nevertheless (Fig. 4). Rut depth was measured by placing an aluminium profile across the rut and measuring the vertical distance to the deepest point of the rut with a folding rule. In cases featuring lateral bulging, the aluminium profile was placed to measure the undisturbed soil surface. The distance between registrations was measured with a tape measure or a folding rule, following the direction of the wheel track (Fig. 1). The distances measured manually thus deviated somewhat from the perpendicular distances to the start line. To compensate for this, the rut depth profiles measured manually (in Figs. 6–7) were adjusted by eye along the x-axis to better match the rut depth profiles obtained by the GNSS method. No adjustment was made between individual manual registrations. To facilitate visual interpretation of the graphs (Figs. 6–7), only the rut depths for the right-hand tracks are presented.
The total random error for the manual measurements, according to (2), was estimated to be 2.8 cm, including estimated random errors of 2.5 cm relating to the placement of the aluminium profile across the rut (for each side of the rut), 1.25 cm for the placement of the folding rule within the rut, and 0.5 cm for the reading of the folding rule. The location parameter m was set to 0.5.
At Rotflakamyran, rut depth was measured four days after treatment at 2 m intervals (with a few exceptions) in the study plots without ground protection and logging mats. Deep rutting was not observed in the study plots with logging residue, except in one plot (4 spots) at Trågalidsberget. In the plots without ground protection, rut depth was measured again one year later at 1 m intervals (in June 2013). These depths generally agreed well with the measurements made in 2012 (Appendix 1), so only the higher spatial resolution data from 2013 were used for the study plots without ground protection. At Trågalidsberget, rut depth was measured within one day after treatment at 1 m intervals (in June 2013), except in Extra A, where 2 m intervals were used.
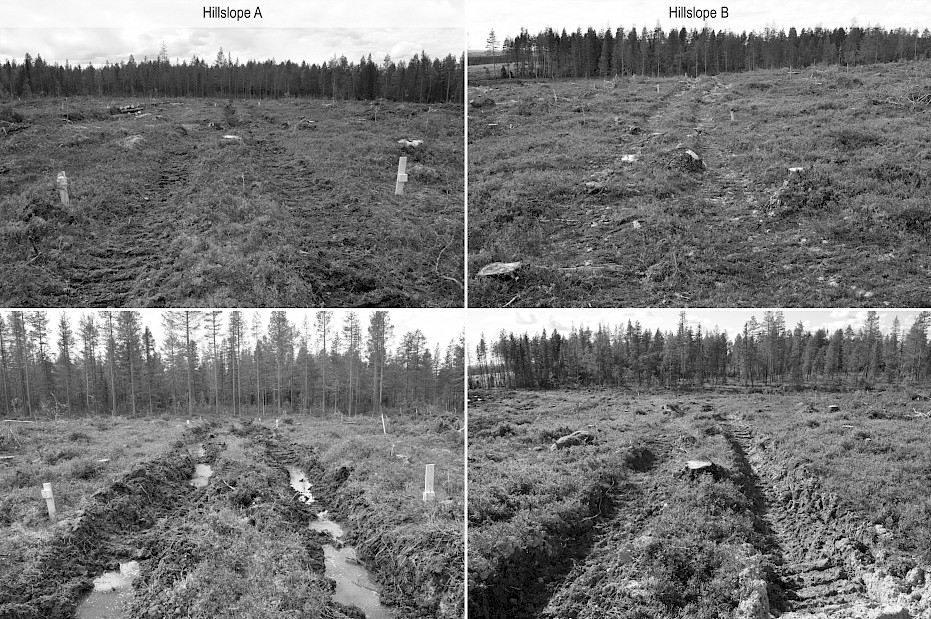
Fig. 4 Rutting on the study plots subjected to forwarder traffic without ground protection at Rotflakamyran one day (hillslope A) and two months (hillslope B) after traffic. The upper panel shows the rutting in the upper part of hillslopes, for which the manually measured depth was taken to be 0 cm. The lower panel illustrates »deep rutting« in the lower parts of the slope — all views are downhill. Illustration from Ring et al. (2020)
2.5 Soil Textural Composition
Soil samples were collected along transects T1–T6 in the control plots and along transect T4 in the remaining plots (Fig. 1). At Rotflakamyran, all transects had similar particle size distributions in the 0–20 cm mineral soil layer on both hillslopes (Ring et al. 2020). However, at Trågalidsberget, the transects in the lower parts of the hillslopes had higher contents of fine fractions (<0.06 mm). On hillslope A, the high content of stones prevented sampling of T1 and T2. Loss on ignition (at 550°C) typically varied between 3 and 7% of the mass fraction of particles less than 2 mm for both sites. All hillslopes had similar particle size distributions along T4 across all study plots except Trågalidsberget hillslope B, where there appeared to be a diagonal gradient in soil texture (Ring et al. 2020).
2.6 Soil-Water Content and Precipitation at Treatment
At the time of treatment, three soil samples per transect (Fig. 1) were collected from the 0–20 cm mineral soil layer using a soil corer with a diameter of 27 mm. One composite sample was formed from the three samples per transect. The gravimetric water content of each composite sample wasdetermined after drying at 105°C. On hillslope A at Trågalidsberget, the high content of stones prevented sampling of T1 and T2.
The gravimetric water content ranged from 23 to 73% (Fig. 5). At Rotflakamyran, volumetric samples were difficult to collect along hillslope A and in the lower part of hillslope B because of the soil high water content. Heavy precipitation occurred at both sites before treatment: some 50 mm of rain fell at Rotflakamyran during the week before treatment of hillslope A (Swedish Meteorological and Hydrological Institute, SMHI, http://luftweb.smhi.se/), and another ca. 35 mm fell before treatment of hillslope B. This may have increased the soil-water content above the levels indicated in Fig. 5. At Trågalidsberget, 48 mm of rain fell during the eight days before treatment (data from SMHI station Bygdsiljum D).
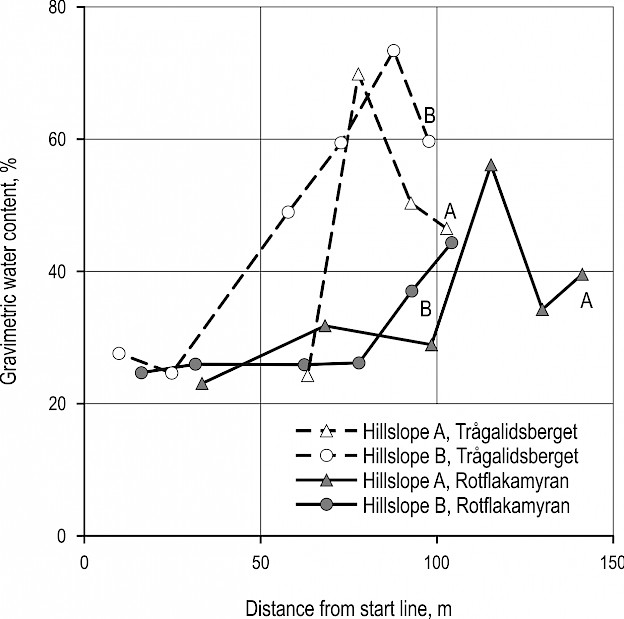
Fig. 5 Gravimetric water content in the 0–20 cm mineral soil layer of the control plots. Soil samples were collected within one day or on the day of treatment, except for at Rotflakamyran hillslope B, which was sampled three days before treatment. At hillslope B, the water content on the day of treatment may have been even higher because ca. 35 mm more rain fell between soil sampling and treatment.
3. Results
3.1 Comparison of Methods
Visual inspection of Figs. 6–7 (and of corresponding graphs for the left tracks, not shown) indicates that the general pattern of rut depth along the study plots without ground protection was similar for both measurement methods, although the GNSS method sometimes generated rut depths greater than zero. For Trågalidsberget, however, greater depths were often recorded manually (Fig. 7), also for the left tracks (data not shown). For the plots where logging mats had been used, the results of the two methods were less consistent, probably because the soil disturbance was harder to spot. The estimated total random error was of the same order of magnitude for both methods (manual 2.8 cm, GNSS 4.0 cm).
3.2 Effect of Forwarder Traffic
Deep rutting occurred mainly when the forwarder was driven without ground protection (Figs. 6–7). In unprotected plots, the rut depth was generally <0.2 m in the upper part of the plots and then increased distinctly at some point along the hillslope (Figs. 6–7). In the most downhill part, however, the rut depth tended to decrease. The depth profiles of the left and right tracks along the hillslopes did not completely match for any of the twelve plots (see Appendix 2 for examples).
Some rutting also occurred in the plots with logging mats and in four spots in one plot with logging residue at Trågalidsberget. On the plots with logging mats (used at Rotflakamyran only), rutting occurred when the forwarder slipped off the mat. Additional soil disturbance occurred because the mats were pressed into the ground, either parallel to the ground surface or at an angle whenobstructed by boulders or stumps. Even so, in the sensitive area downhill, the greatest mean rut depths occurred in plots without ground protection (Fig. 8). Note, however, that the rut depth for the residue treatment was measured relative to the upper surface of the logging residue. The mean depth of the logging residue between the left and right ruts at Rotflakamyran was 0.16 m (SD=0.14 m) and 0.17 m (SD=0.14 m) for hillslopes A and B, respectively. The corresponding depth for Trågalidsberget was 0.061 m (SD=0.13 m) and 0.046 m (SD=0.15 m), respectively.
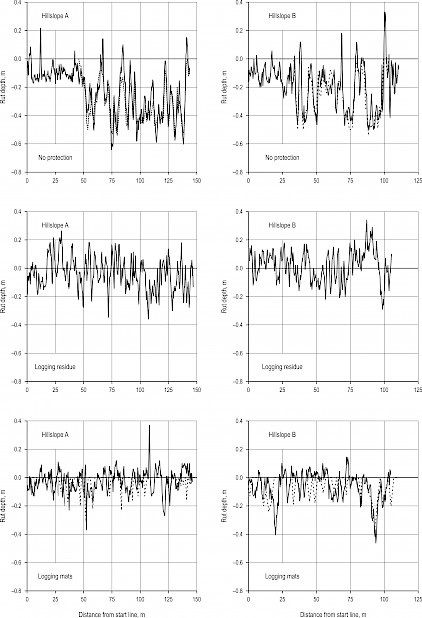
Fig. 6 Rut depth along hillslopes A and B at Rotflakamyran for the right rut in the plots with no ground protection, logging residue and logging mats. Rut depths, measured with a ruler at 1 m and 2 m intervals in the plots with no protection and logging mats, respectively, are shown as dashed lines, and depths estimated using the GNSS method are shown as solid lines
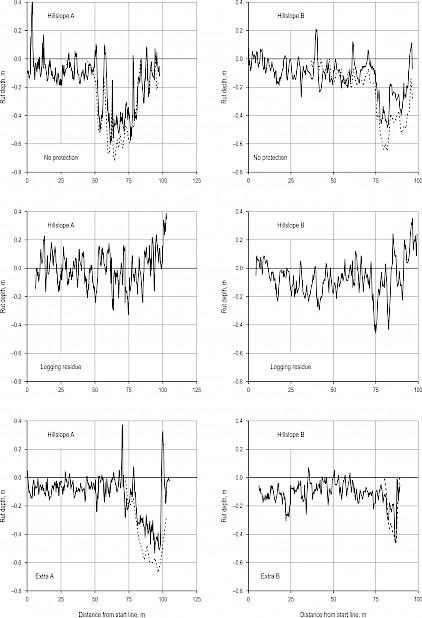
Fig. 7 Rut depth along hillslopes A and B at Trågalidsberget for the right rut in the plots with no ground protection (No protection and Extra A and B) and logging residue. Rut depths, measured with a ruler at 1 m intervals (except in Extra A, where 2 m intervals were used), are shown as dashed lines; depths estimated using the GNSS method as solid lines
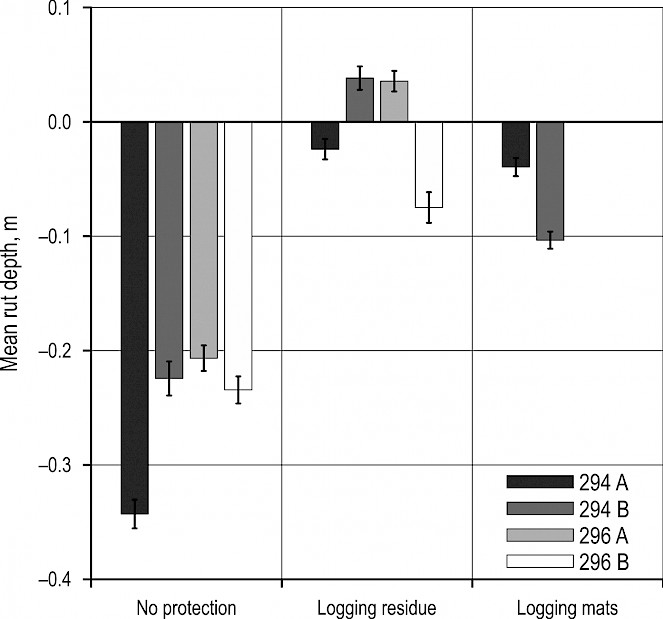
Fig. 8 Mean rut depth (assessed using the GNSS method) between transects T4 and T6 at Rotflakamyran (294) and Trågalidsberget (296) for hillslopes A and B, respectively. The error bars show ±1 standard error of the mean. Means and standard errors were calculated for the left and right wheel tracks together. The mean distance between T4 and T6 was 26.2 m (SD 1.1 m)
4. Discussion
Preventing soil compaction and rutting on forest land helps maintain ecosystem functions, site productivity and people’s appreciation of forests (Cambi et al. 2015, Gundersen et al. 2016). The environmental impact of off-road traffic by forest machinery has therefore attracted considerable attention in Sweden (Anderssonet al. 2016, Keskitalo et al. 2016). Recent regulations state that serious damage caused by off-road forest transportation must be prevented (Swedish Forest Agency 2020), but the high year-round demand for forest products makes compliance with these regulations challenging (Keskitalo et al. 2016). The study plots examined here extend from uphill groundwater recharge areas to downhill discharge areas. This plot configuration was chosen to study the effects of the anticipated gradients in soil type and soil water content, which are important for rut formation (Cambi et al. 2015, Toivio et al. 2017, Sirén et al. 2019). As expected, the soil-water content was higher in the lower parts of the hillslopes (Fig. 5). However, the soil textural composition along the hillslopes tended to differ between the two sites. At Rotflakamyran, the soil textural composition was similar both along and between the hillslopes, but at Trågalidsberget, the content of fine soil fractions tended to be higher downhill.
Rut depth was hypothesized to increase downhill, which was only supported by the results for the plots without ground protection (Figs. 6–7). However, the increase was abrupt rather than gradual. There was no clear indication that the bearing capacity of the root mats of the harvested stands varied appreciably along the hillslopes (Ring et al. 2020). Soil sampling in the upper parts of these plots revealed a high content of boulders, stones and gravel in the upper soil (Hansson et al. 2018). Stoniness has important effects on rutting (Niemi et al. 2017); accordingly, the high boulder and stone content and drier soil conditions seem to have prevented deep rutting in the upper part, whereas deep ruts were formed in wetter downhill areas (Figs. 6–7). Probe insertions along the study plots at Trågalidsberget showed that penetration depths increased in downhill areas where the content of fine soil was high (Ring et al. 2020). However, no such boundary was observed at Rotflakamyran.
The decrease in rut depth in the most downhill parts of the plots without ground protection was probably caused by the forwarder not crossing the downhill short side as well as the fact that fewer passes were made across the downhill area (see M&M) and the lighter part of the forwarder being in the front (at Rotflakamyran). Driving across stumps, roots and superficial stones and boulders induced rutting locally and contributed to the large variation in rut depth along the hillslopes as well as between the left and right tracks (Appendix 2).
The logging residue and logging mats largely prevented deep rutting even though plots protected with these materials were exposed to additional traffic during the application and (in the case of the logging mats) removal of the ground protection. The number of extra passes was highest in the upper parts of the hillslopes. Some soil disturbance was observed even when the forwarder had been driven on logging residue or logging mats. However, the impact was much less pronounced than in plots without ground protection, and mineral soil was seldom exposed. Since a thick layer of logging residue was applied (Fig. 2), the measurements in the ruts indicated that the soil beneath the residue had been compressed and/or the residue was pressed into the soil (Figs. 6–8). In a study on silty soils in New Brunswick, Canada, uncovered trails exhibited significantly greater soil disturbance than trails protected with 15–20 kg m-2 of logging residue when forest machinery was driven over them (Poltorak et al. 2018). Since greater quantities of logging residue were applied at Rotflakamyran and Trågalidsberget, the results presented here seem reasonable.
In this study, ground protection was applied over the full lengths of the study plots to enable comparisons along the hillslope. In operational forestry, logging mats would typically only be applied in the wet areas downhill. Some of the soil disturbance observed in the plots with logging mats was caused by the forwarder occasionally slipping off the mats. Stumps and superficial boulders rendered stable application of the mats difficult, causing soil disturbance and wear on the logging mats as they were driven over (Ring et al. 2020). When reversing, the machine operator was forced to rely largely on the forwarder rear vision camera because the laden wood bunk obstructed the view; together with the tilting mats, this made driving difficult.
Logging residue was applied from the forwarder wood bunk, whereas during logging operations the harvester would apply tops from trees within its range (which is about 14–16 m) while processing individual trees. The quantities of residue applied were generally high for the site fertility (site quality class approx. 3.7 m3 ha-1 yr-1) (Fig. 2) and when compared to previous studies (Eliasson and Wästerlund 2007, Han et al. 2009, Gerasimov and Katarov 2010, Labelle and Jaeger 2012, Poltorak et al. 2018). In practical forestry, if insufficient residue is available in the immediate locality, additional residue could be obtained from other parts of the forest compartment.
The GNSS method proved to be a useful alternative to manual measurements for assessing rut depth (Figs. 6–7). The large number of registrations and the relatively smooth soil surface probably contributed to this. However, unrealistic rut depths were obtained in some cases, probably because the predicted original ground surface (zTIN) for these sections differed appreciably from the true soil surface. Difficulties in defining the reference terrain level used to determine rut depth were also encountered in a study where rut depth was measured using a LiDAR sensor mounted on a harvester and a forwarder (Salmivaara et al. 2018). In the present study, the total random error of the GNSS method was estimated to be 4.0 cm. There are additional sources of uncertainty for the GNSS method, such as systematic errors in zTIN and z. Since the soil surface of the ruts (z) was better defined and easier to follow with the rover pole than the surface of the undisturbed soil adjacent to the ruts, the systematic error in z may have been smaller than that in zTIN. This would cause an overestimation of the rut depth. For the manual measurements, the effect of lateral bulging could be difficult to determine. In this study, any misjudgement of the original soil surface is more likely to have led to an overestimation than underestimation of the rut depth.
Despite the good agreement between the two methods, the manual measurements tended to yield greater depths than the GNSS method, particularly at Trågalidsberget. At Rotflakamyran, the rut depths measured manually four days after treatment were similar, with a few exceptions, to those measured manually one year later (Appendix 1), and the depths obtained using the GNSS method generally agreed well with the manual measurements performed 3–4 months earlier in the no protection plots (Fig. 6). At Trågalidsberget, the differences between methods tended to be greater (Fig. 7). Here, the higher content of fine soil in the downhill areas with deep rutting may have increased erosion in the ruts during the 3–4 months between the manual and GNSS measurements (signs of erosion were observed during field visits in 2017 and 2018). About 200 mm of precipitation fell over this period and, during the last weeks, the air temperature started falling below 0°C. Any eroded soil is likely to have been deposited on the bottom of the rut given the low hillslope angle. The ruts ended at the downhill short side of the plots, and any surface runoff in the ruts was infiltrated along the ruts or at their ends.
5. Conclusions
Methods and tools for detecting and managing sites sensitive to rutting are being developed in both academia and operational forestry (Murphy et al. 2008, Andersson et al. 2016, Lidberg et al. 2020). A major Swedish objective has been to avoid excessive sediment transport to surface water caused by off-road forest transportation (Swedish Forest Agency 2020). Such transport could happen as a result of rutting and soil compaction close to surface water. However, rutting and soil compaction are also unwanted in areas further away from surface water because they may hinder regeneration and reduce recreational value (Cambi et al. 2015, Gundersen et al. 2016). The ground protection measures examined in this work proved useful for avoiding deep rutting in the most sensitive areas near the ditches, but both measures still had an impact on the soil. Logging residue is readily available at logging sites, but its use for ground protection may compete with its harvesting for energy production. The use of logging mats avoids this problem but requires more planning and transportation. Despite these complications, the results presented here suggest that there is considerable scope for reducing rutting during off-road forest transportation by acknowledging the variability of ground conditions and continuing to develop planning tools and onsite procedures such as ground protection.
Acknowledgements
The authors wish to thank Holmen AB for hosting the study sites and for adapting their procedures to accommodate the experimental design. The authors greatly appreciate the field work performed by Sten Nordlund and the work related to the driving treatments carried out by Ulf Carlsson and Tomas Lundqvist. The study was funded by Formas (Swedish Research Council for Environment, Agricultural Sciences and Spatial Planning, project 2010-1168); the research programmes ForWater, funded by Formas (project 2010-0089), and Future Forests, supported by the Foundation for Strategic Environmental Research, the Swedish forestry, the Swedish University of Agricultural Sciences, Umeå University and Skogforsk. Financial support was also received from the Swedish Energy Agency (project 41997-1) and the research programme EFFORTE (Efficient forestry by precision planning and management for sustainable environment and cost-competitive bio-based industry) with funding from the Bio Based Industries Joint Undertaking under the European Union’s Horizon 2020 research and innovation programme under grant agreement No 720712.
7. References
Ågren, A.M., Lidberg, W., Ring, E., 2015: Mapping temporal dynamics in a forest stream network—implications for riparian forest management. Forests 6(9): 2982–3001. https://doi.org/10.3390/f6092982
Andersson, E., Andersson, M., Blomquist, S., Forsberg, O., Lundh, G., 2016: Nya och reviderade målbilder för god miljöhänsyn - Skogssektorns gemensamma målbilder för god miljöhänsyn vid skogsbruksåtgärder. Swedish Forest Agency Report 12-2016.
Fredén, C. (Ed.), 1994: Berg och jord. Sveriges Nationalatlas.
Cambi, M., Certini, G., Neri, F., Marchi, E., 2015: The impact of heavy traffic on forest soils: A review. For. Ecol. Manage. 338: 124–138. http://dx.doi.org/10.1016/j.foreco.2014.11.022
Croke, J.C., Hairsine, P.B., 2006: Sediment delivery in managed forests: a review. Environ. Rev. 14(1): 59–87. http://dx.doi.org/10.1139/a05-016
Eliasson, L., Wästerlund, I., 2007: Effects of slash reinforcement of strip roads on rutting and soil compaction on a moist fine-grained soil. For. Ecol. Manage. 252(1–3): 118–123. http://dx.doi.org/10.1016/j.foreco.2007.06.037
Fan, L., Smethurst, J., Atkinson, P., Powrie, W., 2014: Propagation of vertical and horizontal source data errors into a TIN with linear interpolation. Int. J. Geogr. Inf. Sci. 28(7): 1378–1400. https://doi.org/10.1080/13658816.2014.889299
Gerasimov, Y., Katarov, V., 2010: Effect of bogie track and slash reinforcement on sinkage and soil compaction in soft terrains. Croat. J. For. Eng. 31(1): 35–45.
Gundersen, V., Clarke, N., Dramstad, W., Fjellstad, W., 2016: Effects of bioenergy extraction on visual preferences in boreal forests: a review of surveys from Finland, Sweden and Norway. Scand. J. For. Res. 31(3): 323–334. http://dx.doi.org/10.1080/02827581.2015.1099725
Han, S.-K., Han, H.-S., Page-Dumroese, D.S., Johnson, L.R., 2009: Soil compaction associated with cut-to-length and whole-tree harvesting of a coniferous forest. Can. J. For. Res. 39(5): 976–989. https://doi.org/10.1139/X09-027
Hansson, L.J., Koestel, J., Ring, E., Gärdenäs, A.I., 2018: Impacts of off-road traffic on soil physical properties of forest clear-cuts: X-ray and laboratory analysis. Scand. J. For. Res. 33(2): 166–177. https://doi.org/10.1080/02827581.2017.1339121
Hansson, L., Šimůnek, J., Ring, E., Bishop, K., Gärdenäs, A.I., 2019: Soil compaction effects on root-zone hydrology and vegetation in boreal forest clearcuts. Soil Sci. Soc. Am. J. 83 (s1): S105–S115. http://dx.doi.org/10.2136/sssaj2018.08.0302
HMK, 2017: HMK - handbok i mät- och kartfrågor, GNSS-baserad detaljmätning. Swedish mapping, cadastral and land registration authority. https://www.lantmateriet.se/HMK
Jourgholami, M., Labelle, E., Feghhi, J., 2017: Response of runoff and sediment on skid trails of varying gradient and traffic intensity over a two-year period. Forests 8(12): 472. http://www.mdpi.com/1999-4907/8/12/472
Jungqvist, G., Oni, S.K., Teutschbein, C., Futter, M.N., 2014: Effect of climate change on soil temperature in Swedish boreal forests. PloS ONE 9(4): e93957. http://www.ncbi.nlm.nih.gov/pubmed/24747938
Kellomäki, S., Maajärvi, M., Strandman, H., Kilpeläinen, A., Peltola, H., 2010: Model computations on the climate change effects on snow cover, soil moisture and soil frost in the boreal conditions over Finland. Silva Fenn. 44(2): 213–233. https://doi.org/10.14214/sf.455
Keskitalo, E.C.H., Bergh, J., Felton, A., Björkman, C., Berlin, M., Axelsson, P., Ring, E., Ågren, A., Roberge, J.-M., Klapwijk, M.J., Boberg, J., 2016: Adaptation to climate change in Swedish forestry. Forests 7(2): 28. https://doi.org/10.3390/f7020028
Kozlowski, T.T., 1999: Soil compaction and growth of woody plants. Scand. J. For. Res. 14 (6): 596–619. http://dx.doi.org/10.1080/02827589908540825
Labelle, E.R., Jaeger, D., 2012: Quantifying the use of brush mats in reducing forwarder peak loads and surface contact pressures. Croat. J. For. Eng. 33(2): 249-274.
Labelle, E.R., Jaeger, D., Poltorak, B.J., 2015: Assessing the ability of hardwood and softwood brush mats to distribute applied loads. Croat. J. For. Eng. 36(2): 227–242.
Laudon, H., Kuglerová, L., Sponseller, R.A., Futter, M., Nordin, A., Bishop, K., Lundmark, T., Egnell, G., Ågren, A.M., 2016: The role of biogeochemical hotspots, landscape heterogeneity, and hydrological connectivity for minimizing forestry effects on water quality. Ambio 45(2): 152–162. https://doi.org/10.1007/s13280-015-0751-8
Lidberg, W., Nilsson, M., Ågren, A., 2020: Using machine learning to generate high-resolution wet area maps for planning forest management: A study in a boreal forest landscape. Ambio 49(2): 475–486. https://doi.org/10.1007/s13280-019-01196-9
McDonald, T.P., Seixas, F., 1997: Effect of slash on forwarder soil compaction. J. For. Eng. 8(2): 15–26. https:// doi.org/10.1080/08435243.1997.10702700
Mohtashami, S., Eliasson, L., Jansson, G., Sonesson, J., 2017: Influence of soil type, cartographic depth-to-water, road reinforcement and traffic intensity on rut formation in logging operations: a survey study in Sweden. Silva Fenn. 51(5): article id 2018. https:// doi.org/10.14214/sf.2018
Munthe, J., Hultberg, H., 2004: Mercury and methylmercury in runoff from a forested catchment – concentrations, fluxes, and their response to manipulations. Water Air Soil Pollut.: Focus 4(2): 607–618. https://doi.org/10.1023/B:WAFO.0000028381.04393.ed
Murphy, P.N.C., Ogilvie, J., Castonguay, M., Zhang, C.-f., Meng, F.-R., Arp, P.A., 2008: Improving forest operations planning through high-resolution flow-channel and wet-areas mapping. For. Chron. 84(4): 568–574. https://doi.org/10.5558/tfc84568-4
Niemi, M.T., Vastaranta, M., Vauhkonen, J., Melkas, T., Holopainen, M., 2017: Airborne LiDAR-derived elevation data in terrain trafficability mapping. Scand. J. For. Res. 32(8): 762–773. https://doi.org/10.1080/02827581.2017.1296181
Österling, M.E., Arvidsson, B.L., Greenberg, L.A., 2010: Habitat degradation and the decline of the threatened mussel Margaritifera margaritifera: influence of turbidity and sedimentation on the mussel and its host. J. Appl. Ecol. 47(4): 759–768. http://dx.doi.org/10.1111/j.1365-2664.2010.01827.x
Poltorak, B.J., Labelle, E.R., Jaeger, D., 2018: Soil displacement during ground-based mechanized forest operations using mixed-wood brush mats. Soil Till. Res. 179: 96–104. https://doi.org/10.1016/j.still.2018.02.005
Ring, E., Andersson, M., Berg, S., Bergkvist, I., Bishop, K., Eklöf, K., Hansson, L., Hjelm, K., Högbom, L., Jansson, G., 2020: The 294 Rotflakamyran and 296 Trågalidsberget sites – A field study into the environmental impact of forwarder traffic. Skogforsk Arbetsrapport 1033-2020.
Salmivaara, A., Miettinen, M., Finér, L., Launiainen, S., Korpunen, H., Tuominen, S., Heikkonen, J., Nevalainen, P., Sirén, M., Ala-Ilomäki, J., Uusitalo, J., 2018: Wheel rut measurements by forest machine-mounted LiDAR sensors – accuracy and potential for operational applications? Int. J. For. Eng. 29(1): 41–52. https://doi.org/10.1080/14942119.2018.1419677
Sirén, M., Salmivaara, A., Ala-Ilomäki, J., Launiainen, S., Lindeman, H., Uusitalo, J., Sutinen, R., Hänninen, P., 2019: Predicting forwarder rut formation on fine-grained mineral soils. Scand. J. For. Res. 34(2): 145–154. https://doi.org/10.1080/02827581.2018.1562567
SMHI 2019a: Normal årsmedeltemperatur (normal annual mean temperature for 1961–1990). Swedish Meteorological and Hydrological Institute, http://www.smhi.se/klimatdata/meteorologi/temperatur/normal-arsmedeltemperatur-1.3973.
SMHI 2019b: Normal uppmätt årsnederbörd, medelvärde 1961–1990 (measured normal annual precipitation, mean for 1961–1990). Swedish Meteorological and Hydrological Institute, http://www.smhi.se/klimatdata/meteorologi/nederbord/normal-uppmatt-arsnederbord-medelvarde-1961-1990-1.4160.
Stendahl, J., Lundin, L., Nilsson, T., 2009: The stone and boulder content of Swedish forest soils. CATENA 77(3): 285–291. http://dx.doi.org/10.1016/j.catena.2009.02.011
Swedish Forest Agency, 2020: Skogsvårdslagstiftningen Gällande regler 1 april 2020. Swedish Forest Agency.
Tan, X., Chang, S.X., Kabzems, R., 2005: Effects of soil compaction and forest floor removal on soil microbial properties and N transformations in a boreal forest long-term soil productivity study. For. Ecol. Manage. 217(2): 158–170. https://doi.org/10.1016/j.foreco.2005.05.061
Toivio, J., Helmisaari, H.-S., Palviainen, M., Lindeman, H., Ala-Ilomäki, J., Sirén, M., Uusitalo, J., 2017: Impacts of timber forwarding on physical properties of forest soils in southern Finland. For. Ecol. Manage. 405: 22–30. https://doi.org/10.1016/j.foreco.2017.09.022
Williamson, J.R., Neilsen, W.A., 2000: The influence of forest site on rate and extent of soil compaction and profile disturbance of skid trails during ground-based harvesting. Can. J. For. Res. 30(8): 1196–1205. https://doi.org/10.1139/x00-041
Wood, P.J., Armitage, P.D., 1997: Biological effects of fine sediment in the lotic environment. Environ. Manage. 21(2): 203–217. https://doi.org/10.1007/s002679900019
Wronski, E.B., Murphy, G., 1994: Chapter 14 – Responses of Forest Crops to Soil Compaction. In Developments in Agricultural Engineering 11, Soane, B.D., van Ouwerkerk, C., Eds, 317–342 p.
Appendix
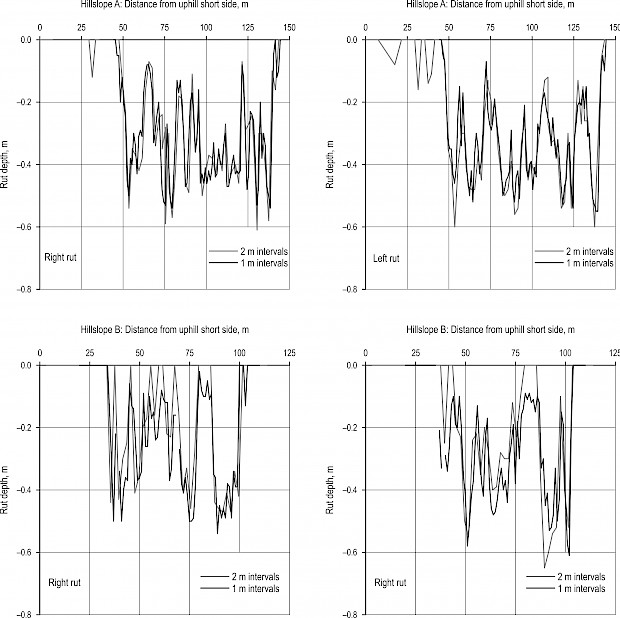
Fig. A1 Rut depths measured with a folding rule from an aluminium profile placed across the rut to the deepest point of the rut at Rotflakamyran at 2 m intervals, with a few exceptions, in 2012, and, one year later, at 1 m intervals in 2013
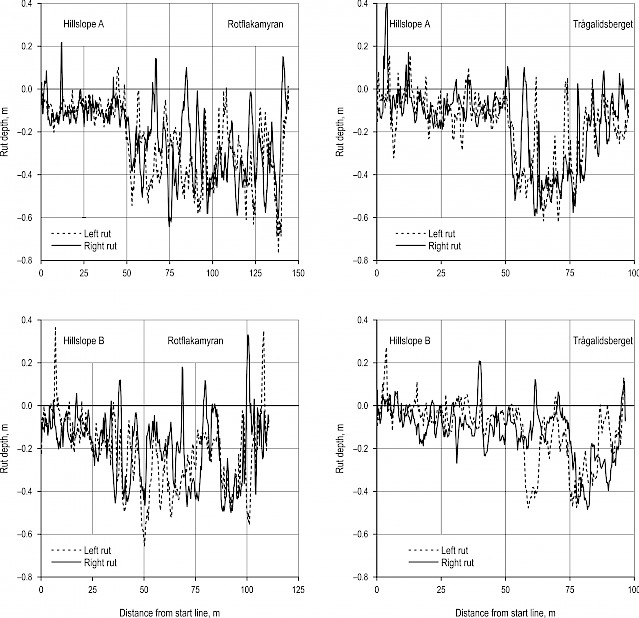
Fig. A2 Rut depth, assessed using the GNSS method, for the left and right ruts in the plots with no ground protection (No protection plots) at Rotflakamyran and Trågalidsberget
© 2021 by the authors. Submitted for possible open access publication under the
terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Authors’ addresses:
Eva Ring, PhD *
e-mail: eva.ring@skogforsk.se
Lars Högbom, PhD
e-mail: lars.hogbom@skogforsk.se
Linnea Hansson, PhD.
e-mail: linnea.hansson@skogforsk.se
Gunnar Jansson, PhD
e-mail: gunnar.jansson@karbyvendel.se
Skogforsk, The Forestry Research Institute of Sweden
Dag Hammarskjölds Väg 36A
SE-751 83, Uppsala
SWEDEN
Mikael Andersson
e-mail: mikael.andersson@skogforsk.se
Skogforsk, The Forestry Research Institute of Sweden
TOMTERNA 1
SE-918 21, Sävar
SWEDEN
* Corresponding author
Received: 24 April 2020
Accepted: 15 September 2020
Original scientific paper