
Application of UAS for Monitoring of Forest Ecosystems – A Review of Experience and Knowledge
doi: 10.5552/crojfe.2022.1727
volume: 43, issue:
pp: 19
- Author(s):
-
- Tomljanović Kristijan
- Kolar Antonija
- Đuka Andreja
- Franjević Milivoj
- Jurjević Luka
- Matak Iva
- Ugarković Damir
- Balenović Ivan
- Article category:
- Subject review
- Keywords:
- UAS, forest ecosystems monitoring, forest operations, remote sensing
Abstract
HTML
In the last couple of years, there have been a great number of articles that cover and emphasize the advantages and possibilities that UAS (Unmanned Air System) offers in forest ecosystem research. In the available research, alongside UAS, the importance of developing sensors that are designed to be used with UAV (Unamnned Air Vehicle), a flight programming software and UAS collected data processing software have been pointed out. With the widespread use of high-precision sensors and accompanying software in forestry, it is possible to obtain accurate data in a short time that replaces long-term manpower in the field with equal or in some cases, such as windthrow calculation or wildlife counting, greater accuracy. The former practice of manual imagery processing is being partly replaced with automated approaches. The paper analyses studies that deal with some form of application of UAS in forestry, e.g. forest inventory, forest operations, ecological monitoring, forest pests and forest fires, and wildlife monitoring. In the forest inventory, a large number of studies deal with the possibilities of applying UAS in mapping vegetation and individual trees, morphological research of individual parts of trees, surface analysis, etc. The use of remote and proximal sensing technologies in forest engineering has mainly been focused on defining surface roughness and topology, road geometry, planning and maintenance, ground-based and cable-based harvesting and soil characteristics and displacement. Wildfire monitoring already relies heavily on the use of UAS and thermal cameras in operations, and it is similar to the mapping of windthrow or directions of the spread of certain insects important for forestry. In wildlife research, numerous studies deal with abundance research of individual terrestrial birds and mammals using UAS thermal imagery. With some drawbacks such as wildlife disturbance or limited UAV range, common to most of the processed studies are positive attitudes regarding the application of UAS in forestry sensing and monitoring, which is slowly becoming a common operative practice, with the scientists’ focus being on developing automated approaches in UAS imagery processing. Reducing the error by improving the technological characteristics of the sensors will in the long run reduce the number of people required to collect data important for forestry, reduce risks and in some cases increase accuracy.
Application of UAS for Monitoring of Forest Ecosystems – A Review of Experience and Knowledge
Kristijan Tomljanović, Antonija Kolar, Andreja Đuka, Milivoj Franjević, Luka Jurjević, Iva Matak, Damir Ugarković, Ivan Balenović
Abstract
In the last couple of years, there have been a great number of articles that cover and emphasize the advantages and possibilities that UAS (Unmanned Air System) offers in forest ecosystem research. In the available research, alongside UAS, the importance of developing sensors that are designed to be used with UAV (Unamnned Air Vehicle), a flight programming software and UAS collected data processing software have been pointed out. With the widespread use of high-precision sensors and accompanying software in forestry, it is possible to obtain accurate data in a short time that replaces long-term manpower in the field with equal or in some cases, such as windthrow calculation or wildlife counting, greater accuracy. The former practice of manual imagery processing is being partly replaced with automated approaches. The paper analyses studies that deal with some form of application of UAS in forestry, e.g. forest inventory, forest operations, ecological monitoring, forest pests and forest fires, and wildlife monitoring. In the forest inventory, a large number of studies deal with the possibilities of applying UAS in mapping vegetation and individual trees, morphological research of individual parts of trees, surface analysis, etc. The use of remote and proximal sensing technologies in forest engineering has mainly been focused on defining surface roughness and topology, road geometry, planning and maintenance, ground-based and cable-based harvesting and soil characteristics and displacement. Wildfire monitoring already relies heavily on the use of UAS and thermal cameras in operations, and it is similar to the mapping of windthrow or directions of the spread of certain insects important for forestry. In wildlife research, numerous studies deal with abundance research of individual terrestrial birds and mammals using UAS thermal imagery. With some drawbacks such as wildlife disturbance or limited UAV range, common to most of the processed studies are positive attitudes regarding the application of UAS in forestry sensing and monitoring, which is slowly becoming a common operative practice, with the scientists’ focus being on developing automated approaches in UAS imagery processing. Reducing the error by improving the technological characteristics of the sensors will in the long run reduce the number of people required to collect data important for forestry, reduce risks and in some cases increase accuracy.
Keywords: UAS, forest ecosystems monitoring, forest operations, remote sensing
1. Introduction
Forest ecosystem management is complex work that requires information on structural forest elements such as forest timber stock, growth rate, abundance, etc. The information has to be as accurate as posible and can be extracted directly in the field or indirectly from remotely sensed imagery (Shao 2012). Satellite- and aircraft-based remote sensing could provide valuable information on land cover and surface conditions, as well as related changes at a variety of spatial and temporal scales (Whitehead et al. 2014a). In the last ten years, satellite images have been replaced by UAS for surveying forests, mapping canopy gaps, measuring forest canopy height, supporting intensive forest management (Tang and Shao 2015, Schiefer et al. 2020), wildfire tracking and prevention (De Vivo et al. 2021), game management planning (Seymour et al. 2017, Lancia et al. 2005, Lisein et al., 2013, Fust and Loos 2020), environmental impact of harvesting operations on the forest floor (Nevalainen et al. 2017, Talbot et al. 2018) and condition and wearing course of forest roads (Hrůza et al. 2016) or skid roads (Pierzchała et al. 2014). One of the main advantages of a fast-growing technology that has an ever-widening range of applications is the simplicity of ready-to-fly unmanned aireal systems (UAS) equipped with cameras and sensors that ensure for relatively low-budget accurate data in forest and wildlife surveys (Hillman et al. 2021, Schiefer et al. 2020, Tang and Shao 2015, Tomljanović et al. 2018). The current common practice for obtaining data in forest inventory involves field work. Such form of data collection required for forest management planning demands significant resources in terms of manpower, equipment, time and money. The use of UAS in inventory is more cost-effective per unit of forest area, especially in countries that do not have on-field forest inventory and where access to accurate data at a small scale becomes too costly (Pulitti et al. 2015). The use of UAS in identifying damaged sites and estimating the extent of these losses showed to be crucial for the harvesting management of salvage logging together with identifying the amount of timber volume from fallen trees during windfall (Mokroš et al. 2017). Furthermore, the UAS can be very useful in more specific pre-harvest, post-harvest, and post-disturbance inventories, when timely and accurate data are needed. Namely, the main advantage of UAS is the possibility to collect data of very high spatial and temporal resolution, even under cloud cover (Puliti et al. 2015). UAS data can also be used to plan silvicultural activities. Environmental monitoring and monitoring of forest health are carried out on larger or smaller areas periodically or by individual surveys and the objectives of such research are to monitor the presence of individual pests, directions of spreading, distribution mapping, tree reactions to pests and in some cases application of pesticides using UAS (Getzin et al. 2012, Iost Filho et al. 2020, Marte et al. 2021). Using high-resolution RGB images obtained from relatively affordable and inexpensive UAS and using convolutional neutral networks (CNNs), it is possible to carry out fairly accurate mapping of dominant tree species of smaller areas (Schiefer et al. 2020). More recently, there have been more and more studies related to wildlife monitoring. With UAS, it is possible to access hard-to-reach isolated sites such as mountain peaks for monitoring mountain ruminants, counting larger bird colonies (Owen 2011), large forest mamals or species of a wide range and low density such as large carnivores (Israël 2011, Tomljanović et al. 2018). The high spatial and temporal resolution of UAS data along with UAS operational flexibility and low cost of data acquisition (Paneque-Gálvez et al. 2014, Whitehead et al. 2014b), will influence future studies in forestry highly and at fine scales (Lisein et al. 2013) for both commercial and research purposes (Whitehead et al. 2014b), as well as improve the control and automation of forest harvesting systems (Ziesak et al. 2014) and enable precision forestry (Holopainen et al. 2014).
The goal of this paper is to provide an overview in the scientific and operational use of unmanned aerial systems (UAS) and vehicles (UAV) in certain aspects of forestry highlighting many advantages, but also identifying disadvantages in this continuously developing technology.
1.1 Unmanned Aerial Vehicles (UAVs)
With the development of aircraft and sensors, aerial photography has become more accessible and its application has become regular in a wide range of scientific, civil and military applications such as meteorology, agronomy, forestry, wildlife research, traffic monitoring, protection and rescue (Tang and Shao 2015, Shahbazi et al. 2014). There are different names in the literature for Unmanned Aerial Vehicle (UAV) or Unmanned Aircraft Systems (UAS) as well as different designs. As a rule, the name refers to a heavier-than-air, self-propelled or unmanned aerial vehicle that can be controlled remotely, fly independently using a pre-programmed flight plan or using complex autonomous dynamic systems or a combination of both (Linchant et al. 2015). The more commonly used name for an unmanned aerial vehicle is »drone«, and it comes from the US military, which first exemplified it as UCAV (Unmanned Combat Aerial Vehicle), combat drone or just drone (Miller et al. 2007). According to Tang and Shao (2015), aircrafts that are part of the UAS can be divided according to the way of take-off and construction into those that have horizontal take-off and landing (aircraft with fixed wings) and vertical take-off and landing (rotary wing UAS like quad copter, autogyros, etc.). In fixed-wing aircrafts, lift is generated as a result of a certain speed of movement through the air, they need a runway, are more complicated to operate and their minimum operating speed is higher compared to rotary-wing UASs. Also, fixed-wing UASs do not have the ability to hover at one point; however, it requires less energy to lift off and for the same amount of time it covers a larger area (Hardin and Jensen 2011). In rotary-wing UASs, lift is generated by horizontal propellers and due to vertical lift they can take off vertically, require less surface area to take off, hover in place and take a photo at any orientation (Wallace et al. 2011). Their construction is less aerodynamic compared to fixed-wing UASs and operating speeds are lower. For these reasons, fixed-wing UASs are more suitable for capturing larger areas with lower spatial resolution or less precision per unit area, while rotary-wing UASs are more suitable for capturing smaller areas with higher spatial resolution (Tang and Shao 2015, Christie et al. 2016, Linchant et al. 2015). The aircrafts are typically powered by internal combustion engines or by electric motors with batteries. Both drives have their advantages and disadvantages. Experience shows that aircrafts powered by internal combustion engines have a larger number of parts, are more complicated compared to electric motors, are noisier due to the motor itself, and transmit higher vibrations to sensors (Linchant et al. 2015). The advantage is that, when shooting large areas daily by simply refueling, the aircraft is immediately ready for further flight. In electric aircraft, the engine receives energy from batteries. The engine itself is lighter and has a higher specific power per kg compared to petrol, but the batteries represent a significant load. Batteries are sensitive to weather conditions, especially low temperatures, which reduces their efficiency (Tomljanović et al. 2018). When shooting larger areas with electrically powered aircraft, it is necessary to provide a larger number of charged batteries, which then significantly increases the price of such an aircraft or flight. Also, rotary-wing UASs are in general constructed with a higher number of rotors (4–6–8, etc.). Failure of only one engine can lead to the crash of such an aircraft (Anderson and Gaston 2013). Often the weight or complexity of the sensors used determines the size and construction of the UAS (Dudek et al. 2013). Experiences in the use of UAS in forestry show that fixed-wing UASs are suitable for research focused on forest management, where the identification of each species is less important (Balenović et al. 2020), while some studies in wildlife monitoring show that they are quieter and less disturbing for the researched mammals (Arona et al. 2018). Rotary-wing UAS is more suitable for research that requires higher spatial resolution such as research within urban forests, mapping of individual trees, thermal imaging, etc. (Schiefer et al. 2020, Tomljanović et al. 2018).
2. Overview of UAV Technology in Forest Ecosystems
2.1 Forest Inventory
Forest inventory provides information on forest resources that are crucial for sustainable forest management (White et al. 2016, Balenović et al. 2019). In most countries worldwide, forest inventory is primarily performed by means of conventional field surveys. In general, this implies that main tree attributes (e.g. tree species, diameter at breast height, tree height) are collected and measured within a certain number of sample plots distributed throughout the forest area of interest. The individual tree measurements are then used to calculate and estimate plot- and stand-level forest attributes. Although conventional field surveys provide information on forest resources of satisfying accuracy, they are labour-intensive and time-consuming (Balenović et al. 2017). Therefore, a great research interest to apply remote sensing methods in forest inventory has existed for a long time. Rapid technological development during the last few decades and a great number of conducted studies resulted in integration of Airborne Laser Scanning (ALS) technology in operational forest inventories of certain countries (e.g. Scandinavian countries, North America) (Næsset 2014, Ørka et al. 2018). However, the availability of ALS data connected with its high-acquisition costs presents the main limitation for the widespread use of ALS technology in forest inventory of many countries (Balenović et al. 2017, 2019). Additionally, very few countries have periodically updated national ALS surveys, which is one of the prerequisites for the operational use.
Further technological advances, in terms of development and miniaturization of various sensors and emergence of UAV platforms, greatly shifted the focus of forest inventory studies from satellite and airborne remote sensing to UAV remote sensing. Conducted studies encompassed various types of forests with different structural and terrain characteristics, as well as various types of UAV platforms (e.g. fixed- and rotary-wing) and sensors (e.g. LiDAR, classical visual spectral, multispectral and hyperspectral cameras). So far, an active LiDAR sensor and passive sensor such as classical visual camera with red, green and blue bands have been in the greatest focus of UAV-based forest inventory studies. The application of the first one, LiDAR sensor, is very often referred to as Unmanned-borne Laser Scanning (ULS), while the application of the latter one (visual camera) is often referred to as UAV photogrammetry (UAVPH). Both ULS and UAVPH technologies provide point clouds of very high density and generation of Canopy Height Models (CHM) of very high spatial resolution. Point clouds and CHMs enable direct or indirect estimation of various tree and forest attributes by applying two main approaches:
Þ Area-Based Approach (ABA)
Þ Individual-Tree-Based Approach (ITBA).
ABA is commonly used in ALS-based forest inventory to estimate plot- and stand-level forest attributes (Næsset 2014, Ørka et al. 2018) and in the same manner it is applied to UAV-based forest inventory. From point clouds or CHMs, a large number of various height and density metrics describing forest structure can be calculated. These metrics are usually extracted for a certain number of sample plots and regressed against field reference data to establish prediction models for various plot-level forest attributes (e.g. mean height, mean diameter at breast height, mean basal area, tree density, volume, biomass, etc.). Established models are then used to estimate forest inventory attributes throughout the wider, targeted forest area with no need for additional field measurements. Fig.1 shows ULS and UAVPH point clouds of very high density for one exemplary sample plot in even-aged pedunculate oak forest. Although UAVPH point cloud (≈395 points·m-2) for this example has even greater density than ULS point cloud (≈340 points·m-2), it can be seen that UAVPH point cloud is sparse in lower parts with only a small share of points reaching the ground. Namely, compared to active ULS technology, UAVPH is a passive technology that cannot penetrate through the forest canopy and reach the ground (White et al. 2013). This is especially emphasized and problematic in dense forest stands during leaf-on conditions (Balenović et al. 2019), and presents the main limitation of UAVPH compared to ULS-based forest inventory. Accurate Digital Terrain Model (DTM) generated from points classified as ground is crucial for reliable tree- and plot-level attributes estimation (Jurjević et al. 2021). DTM serves to normalize point clouds or Digital Surface Models (DSMs), i.e. to convert elevations to height-above-ground values. Therefore, an existing DTM of reliable accuracy very often has to be used in UAVPH-based forest inventory.

Fig. 1 ULS (a) and UAVPH (b) point clouds for one exemplary plot located in even-aged pedunculate oak (Quercus robur L.) forest (vertical axis is exaggerated)
Several studies conducted using ABA confirmed the great potential of both ULS (Cao et al. 2019, Puliti et al. 2020, Hu et al. 2021) and UASPH (Puliti et al. 2015, 2020, Tuominen et al. 2015, 2017, Ota et al. 2017, Giannetti et al. 2018, Balenović et al. 2019, Cao et al. 2019, Shen et al. 2019, Jurjević et al. 2020a) technologies in plot-level forest inventory. The accuracy of the obtained results is in agreement with those obtained by classical ALS, or even outperformed them, such as in the comparison study by Puliti et al. (2020). Among all forest attributes, plot-level height (e.g. Lorey’s mean height, dominant height) is usually estimated with the highest accuracy by both ULS and UASPH, whereas the lowest accuracy is obtained for stem density (Table 1). For example, for dominant height Puliti et al. (2020) achieved relative Root Mean Square Error (RMSE) of 2.08% and 2.11% for UASPH and ULS, respectively. On the other hand, Puliti et al. (2020) estimated stem density with RMSE of 9.34% and 10.87% for UASPH and ULS, respectively. Although ULS data provides better characterization of forest structure and terrain, in the study of Cao et al. (2019) and Puliti et al. (2020), UASPH data in combination with ULS DTM yielded slightly more precise estimates of forest attributes than ULS data. Regarding the main limitation of UASPH and the impossibility to generate an accurate DTM, Gianneti et al. (2018) demonstrated a new approach with DTM-independent metrics for volume estimation using UASPH data. They obtained very similar results as for traditional ALS data and digital aerial photogrammetry combined with ALS DTM. This was further confirmed by Puliti et al. (2020), who extended the number of observed variables to Lorey’s mean height, stem density and basal area, obtaining just slightly lower accuracy for UASPH DTM-independent approach than for ULS data or UAVPH data in combination with ULS DTM. More interestingly, UASPH DTM-independent approach yielded greater accuracy than ALS data for all observed variables (stem density, basal area and volume) with the exception of Lorey’s mean height. The potential advantage of UASPH data over the ULS data is the ability to extract spectral metrics from images. Several studies (Puliti et al. 2015, Tuominen et al. 2015, 2017, Ota et al. 2017, Shen et al. 2019) included spectral metrics in addition to point cloud or CHM metrics to model and estimate forest attributes, but only slight improvements were achieved.
Table 1 Review of results of selected ULS and UAVPH forest inventory studies using ABA
|
Study |
Location |
Forest type (main species) |
HD |
HL |
DBH |
N |
G |
V |
AGB |
|
|
UAVPH |
||||||||||
|
Puliti et al. (2015) |
Norway |
Boreal forest (Picea abies, P. sylvestris, Betula pubescens) |
3.48 |
13.28 |
38.57 |
15.38 |
14.95 |
– |
||
|
Puliti et al. (2017) |
Finland |
Boreal forest (P. abies, P. sylvestris, B. pendula) |
– |
7.50 |
15.20 |
– |
– |
23.96 |
– |
|
|
Ota et al. (2017) |
Japan |
Plantation (Cryptomeria japonica, Chamaecyparis obtuse) |
– |
6.65 |
– |
– |
– |
20.02 |
– |
|
|
Cao et al. (2019) |
China |
Plantation (Metasequoia glyptostroboides Hu and W.C.Cheng, Populus sp.) |
– |
7.20 |
16.64 |
22.40 |
18.09 |
11.21 |
18.51 |
|
|
Shen et al. (2019) |
China |
Plantation (Ginkgo biloba) |
– |
4.60 |
– |
– |
– |
14.17 |
– |
|
|
Jurjević et al. (2020) |
Croatia |
Mixed deciduous forest (Quercus robur) |
– |
4.06 |
– |
– |
– |
– |
– |
|
|
Puliti et al. (2020) |
New Zeland |
Plantation (Pinus radiata) |
2.08 |
– |
– |
9.34 |
7.55 |
7.76 |
– |
|
|
ULS |
||||||||||
|
Cao et al. (2019) |
China |
Plantation (Metasequoia glyptostroboides Hu and W.C.Cheng, Populus sp) |
9.03 |
19.92 |
24.29 |
18.36 |
14.04 |
19.75 |
||
|
Puliti et al. (2020) |
New Zeland |
Plantation (Pinus radiata) |
2.11 |
– |
– |
10.87 |
10.66 |
9.93 |
– |
|
|
HD – dominant height, HL – Lorey’s mean height, DBH – diameter at breast height, N – stem density, G – basal area, V – volume, AGB – above ground biomass |
||||||||||
Unlike the ABA, the ITBA aims to characterize each individual tree in the sample plot. Most commonly, ITBA uses point cloud or CHM metrics of individual trees to directly estimate tree height and crown dimensions (Panagiotidis et al. 2017), which are then used for modeling and calculation of other tree attributes, such as diameter at breast height (DBH), volume, biomass, etc. In some cases, when point cloud of very high density is available, DBH can also be directly estimated (Kuželka et al. 2020). However, prior to any tree attributes estimation, individual trees must be properly segmented, which is an especially demanding task in more complex forest environment, either for manual or automatic segmentation. To eliminate subjectivity and increase effectiveness, automatic segmentation is preferred over the labor-intensive manual segmentation. The success of automatic segmentation of individual trees greatly depends on several main factors, such as forest characteristics of inventoried area, the quality and characteristics of remote sensing data (e.g. point density, CHM spatial resolution), the segmentation algorithm applied, etc. Yang et al. (2019) summarized individual tree segmentation methods in two main groups:
Þ CHM-based methods (e.g watershed, moving window maximum, multi-scale segmentation methods, etc.)
Þ point cloud-based methods (e.g. clustering methods and voxel-based methods).
So far, most ITBA studies focused on tree height and dbh estimation using UAS photogrammetry (Liesen et al. 2013, Wallace et all. 2016, Panagiotidis et al. 2016, Mikita et al. 2016, Krause et al. 2019, Ganz et al. 2019, Jurjević et al. 2020b) and ULS data (Wang et al. 2019, Liang et al. 2019, Jurjević et al. 2020b, Wang et al. 2021, Hyyppa et al. 2020). Tree height can be estimated with high accuracy using UAV photogrammetry or ULS data, and for given references RMSE ranged from 1% to 13%, depending on the type of forest, quality of data, reference measurements, etc. Under canopy ULS managed to achieve high accuracy of DBH estimation, i.e. RMSE of 3% (Hyyppa et al. 2020), whereas above canopy ULS had significantly lower success, achieving RMSE in the range from 10% to 30%, depending on the complexity of the forest.
2.1 Forest Operations
The use of remote and proximal sensing technologies in forest operations has mainly been focused on defining surface roughness and topology, road geometry, planning and maintenance, ground-based and cable-based harvesting and soil characteristics and displacement. Ground-based harvesting systems prevail in use, contributing to the environmental impact specifically in soil disturbance, compaction and rutting. In particular, machine mobility can lead to the reduction of soil porosity, water infiltration and gas exchange, as well as to increasing soil erosion (Christopher and Visser 2007). Talbot and Astrup (2021) report that at present, all UAS-based studies considering site disturbance are based on photogrammetry since these methods, when compared with other methods (LiDAR), are a cost-effective option for collecting high-resolution 3D point clouds documenting the operations in full extent (Pierzchała et al. 2016). Nevalainen et al. (2017) indicate that, even though photogrammetric UAS data have deficiencies due to dense canopy or undergrowth, it is possible to identify skid trails if canopy gaps are sufficiently present, and if UAS survey is performed at low flying altitude with high overlap. Authors acquired images with a 24 MP camera fitted with a 20 mm objective, flying at 100 and 150 m, providing an image resolution of 2 and 3 cm, respectively. The authors proposed a procedure for large-scale field measurements of root depth based on point cloud collected by the UAV photogrammetry, but highlight that there were difficulties in defining the control surface level for both manual and UAV measurements. They state that calibration measurements should be done within an artificial environment with absolute measures or with a ground-based LiDAR scanner, and that RGB information would add to trail registration performance. However, this method needs more research in various weather and terrain conditions. Talbot et al. (2018) proposed the utilization of UAS-derived orthomosaics in conjunction with desktop-based line interception sampling for stand-level assessment of soil disturbance in a cut-to-length (CTL) harvesting system (harvester/forwarder) with a 12 MP GoPro camera and DJI integrated 12 MP camera, both flying at 40–50 m above ground and resulting in images of ground sampling distance (GSD) of 1 cm. Authors reported that UAS-derived orthomosaics appear to provide high resolution and accurate records of site disturbance during harvesting, despite potential limitations in detection from harvesting slash or retention trees (Fig. 2a). Still, they highlight that there are no automated detection methods accurate enough in identifying all disturbance and that they used a visual, subjective method of soil disturbance categorization. Talbot et al (2020) researched continuous surface assessment to discrete point measurements of wheel rutting with a 20 MP DJI camera flying at low height of 10–15 m, providing a GSD similar to those achieved by the tripod (Cambi et al. 2017) and pole (Pierzchała et al. 2016) based studies. Authors concluded that using UAV »ground zero« level (0 vehicle pass) can be uncertain if dense ground vegetation is present and that 3D spatial referencing (x, y, z coordinates) is needed for accurate model building (RTK GNSS or Total Station).
The sustainable management of forest ecosystems requires a high-quality infrastructure of forest roads, despite the possibly negative environmental impact of the forest road network construction (Aricak 2015). Hrůza et al. (2016) examined the application of UAS to plan asphalt forest road wearing course repairs as regards to the urgency and determination of the costs of individual road repairs. The research was conducted using 16 MP camera, flying low at 4–6 m above the road, taking photos at the frequency of 60 frames per minute with the longitudinal overlap of about 90% (Fig. 2c). Authors conclude that this method is objective and accurate in comparison with the commonly used procedures for visual assessment of road damage or geodetic survey, eliminating evaluator’s subjective approach. Time needed to take images of 1 km of a road is in the order of tens of minutes, even though processing of images is time-consuming and takes approximately 10 hours and, except for the necessary manual entry of identical control points, it is fully automated. Pierzchała et al. (2014) also reported the possibility to reduce costs in post-harvesting surveys in monitoring skid roads (i.e. constructed trails) in steep terrain (36–65%) for assessing the extent of disturbance and erosion risk. Authors conclude that for obtaining better results the camera should be precisely calibrated and flying altitude reduced (less than 155 m as in the study).
The research of Hycza et al. (2019) is a practical example of the application of Black Bridge Satellite Imagery with 5 m spatial resolution in modeling the spatial distribution of post-windthrow salvage cutting with regard to elevation, slope, aspect and distance to roads or forest borders. In such planning, it is easier to determine the extent of any calamity, especially after wind disasters in areas that are difficult to reach by forest service workers (Ciesielski et al. 2016) and where the need of fast reaction is a necessity due to the volume of fallen timber and probable loss in value due to decay (Koloman and Strelec 2013) or because of the risk of forest fires and bark beetle outbreaks (Hycza et al. 2019). The use of UAS imagery in identifying damaged sites and estimating the extent for the management of salvage logging (Fig. 2b) can help in preventing the degradation of fallen trees (Mokroš et al. 2017). On approximately 200 hectares, where five large windthrow areas have occurred, the authors combine semi-automatic approach based on UAS imagery and airborne laser scanning (ALS) to GNSS (Global Navigation Satellite System) and Landsat imagery currently used in Slovakian forestry on operational level. The results from the UAS (25.09 ha) and the combined UAS/ALS (25.56 ha) were statistically similar to the reference GNSS measurements (25.39 ha), even though the results from Landsat (19.80 ha) were not. The estimation of salvage logging volume from UAS imagery was 525 m3 (4.93%) - overestimated as opposed to the forest management plan. The use of UAS/ALS combination provides the ability to conduct flights immediately after the disturbance, thus reducing the risks of injuries, and regardless of weather condition (cloudy days).
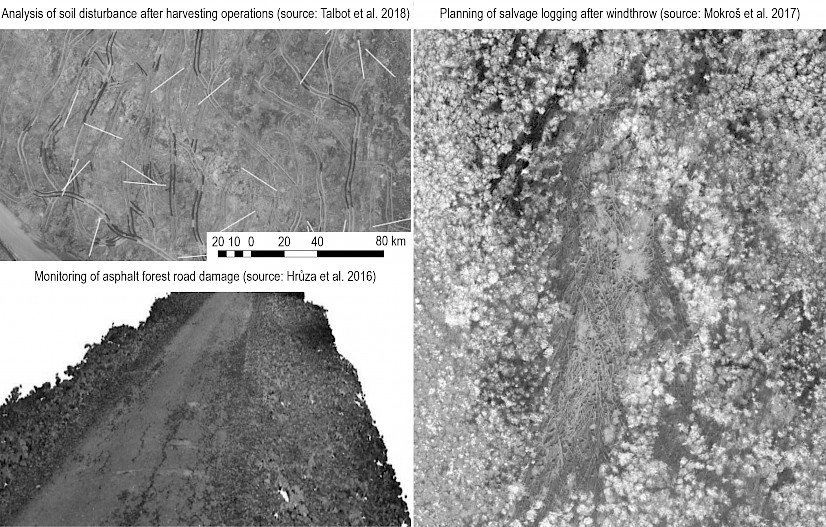
Fig. 2 Application of UAV in forest operations
2.3 Ecological Monitoring, Pests and Forest Fires
Climate change has a major influence on forest health and growth, by indirectly affecting the distribution and abundance of forest pathogens, as well as the severity of tree diseases (Smigaj et al. 2015). According to Gardiner et al. (2010), negative wind impacts, primarily windbreaks, have individually the greatest negative impact on forest ecosystems, permanently changing the environment over time (Falťan et al. 2009). Windstorms and heavy snowfalls represent a serious threat to forests and bring considerable financial impacts, negatively affecting landscape quality (SEF 2020). More than 130 such events have caused notable damage to forests in Europe since the 1950s, with two such destructive storms, on average, each year (Gardiner et al. 2013). SEF (2020) reported that, in Europe in 2015, 1.8 million ha of forests were damaged by wind and snow, the most affected countries being Sweden (3.4% of the forest area), Romania (2.9%), Bulgaria (2.8%) and Croatia (2.6%), which disrupted timber markets and was often followed by bark beetle infestations. In addition to field research, the global navigation satellite system (GNSS) is used in mapping and modeling that predicts sensitivity of individual forest ecosystems to negative wind impacts. The use of satellite images allows modeling of the spatial distribution of windbrakes (Baumann et al. 2014, Ritch et al. 2010, Einzmann et al. 2017, Fortuna et al. 2013, Gancz et al. 2010), the calculation of the volume of windthrow with a combination of growth model and the average volume of the particular forest stands (Ciesielski et al. 2016) and post-windtrow salvage cutting planning (Hycza et al. 2019). There are numerous advantages to using satellite imagery in spatial planning of windswept areas. In addition to satellite imagery, older research shows a rapid and accurate estimate of wintrow with airborne CARABAS-II very high frequency (VHF) (20–90 MHz) synthetic aperture radar (SAR) (Fransson et al. 2002).
In ecological monitoring by UAS, studies are mainly focused on research and monitoring of individual structural elements of stands and individual trees (vegetation cover, abundance, stem density, etc.), some of which have already been described in the forest inventory chapter or use of UAV sensors for monitoring certain climatic factors such as temperature. According to some research (Smigaj et al. 2015), temperature is one of the most important climate factors that is monitored as global negative effects on climate change. In the mentioned study, the authors investigated the consequences of temperature changes on the incidence of diseases caused by global climate change. The research presented the possibilities of disease detection using UAS with thermal camera. The results of the study show that small temperature increase in the crown of trees in which the disease is in progression can be detected by a thermal camera, indicating that UAV-borne cameras may be able to detect sub-degree temperature differences induced by disease onset.
The use of UAS in forest protection is focused on forest fires and forest pest monitoring and prevention. Forest fires monitoring and management, as one aspect of integrated forest protection, was one of the first fields that confirmed the importance of UAS in forestry application (Ambrosia 2002, Ollero 2006). In forest protection management, especially when it comes to forest pest management, early detection of disease or pest foci is extremely important (Filho et al. 2019). Otsu et al. (2018) investigated the seasonal defoliation of the pine moth (Thaumetopoea pityocampa Dennis and Schiff.) in the Mediterranean part of Spain using UAS imagery. The results of the study show the highest R-squared value (0.815), using the Moisture Stress Index (MSI), with an overall accuracy of 72%. Forest disturbances, caused by wind, snow and the gradation of insects (bark beetles) directly affect regeneration, biodiversity, and productivity of the stands. Mapping of the forest canopy gaps can provide a more detailed insight on disturbances. While satellite data cannot detect and measure small gaps (Frokling et al 2009.), they could be detected using very high spatial resolution UAS data. In Germany, Getzin et al. (2012) conducted UAS survey in beech-dominated deciduous and mixed deciduous-coniferous forests, revealing that high resolution images (7 cm) could accurately identify gaps in the canopy down to 1 m2 size. Furthermore, Getzin et al. (2014) demonstrated feasibility of UAS use in quantifiying spatial gap patterns accross age-class, selection-cutting and unmanaged forests. The research by Martel et al. (2021) demonstrates the practical application of UAS in forest protection management where UAVs are used to spray biological insecticides. In the mentioned study, the authors investigated the operative application of UAS in spraying egg parasitoid Trichogramma spp. (Hymenoptera: Trichogrammatidae) against a forest pest, the eastern spruce budworm, Choristoneura fumiferana (Clemens) (Lepidoptera: Tortricidae). The results show that in spruce budworm, treatment with Trichogramma increased egg parasitism and there was no difference between deployment by UAS and by trichocards.
2.4 Wildlife Monitoring
Regular monitoring of animal populations must be established to ensure correct wildlife management (Seymour et al. 2017, Lancia et al. 2005, Lisein et al. 2013) and wildlife protection (Linchant et al. 2015, Mangewa et al. 2019). In regular wildlife management, large game abundance is determined by observation and counting from observatories at regular intervals, by the method of identifying and counting feces, by the method of counting on transects, catch-release-catch (Sutherland 2006), using sensor cameras (Jacobson et al. 1997, Karanth et al. 2006, Tomljanović et al. 2010, Plhal et al. 2011). In addition to direct observations, there are also indirect methods that are more often used for the purpose of scientific research. One method of genetic identification has application in estimating the abundance of species with a wide range of motion and low population density such as large predators (Miller et al. 2005, Caniglia 2008). Animal samples are collected and the number of individuals is estimated indirectly through hair traps (Woods et al. 1999, Ambarlı et al. 2018) or feces (Matosiuk et al. 2019) and the population size and density in the study area is calculated. There are several studies that use satellite imagery for wildlife monitoring purposes such as those conducted on the American bison (Laliberte and Ripple 2003) or artic mammals (LaRue et al. 2011, Platonov et al. 2013). Such studies are typically conducted in a wide area of open and well-surveyed habitats with high contrast that allows the identification of target species. The use of satellite imagery in such surveys reduces the need for manpower, reduces risk, and ensures coverage of larger areas. On the other hand, imagery satellites are quite expensive, not time-flexible because they depend on satellites, as well as sensitive to cloud cover and have less spatial resolution than UAS images.
Using UAS for the purpose of researching birds and mammals allows relatively cheap and rapid determination of wildlife abundance, behavior and habitat interaction (Chabot and Bird 2015, Christie et al. 2016) in open areas and it can be a substitute for classical field methods (Watts et al. 2010). Examples are studies in bird research (Grom et al. 2013), research of large forest mammals by thermal cameras (Chrétien et al. 2015, Tomljanović et al. 2018) or open water surfaces and research of aquatic mammals (Seymour et al. 2017). UAS is also used to support terrestrial research in radio telemetry monitoring of terrestrial mammals where aircraft carry antennas and thus provide support and a wider radius where the signal can be received (VonEhr et al. 2016, Soriano et al. 2009), and for research on smaller birds and bats that cannot wear GPS collars due to battery weight limitation but use smaller UHF radio collars (Shafer et al. 2019, Muller et al. 2019). UAVs are able to carry audio stimulation devices whose purpose in wildlife research may vary (Brinkman and Garcelon 2020). In wildlife monitoring, one of the most frequently studied items is population counting and determination (Jachman 2001). Classical linear transects on which the target animal is observed are still used here (Linchant et al. 2015). Wildlife monitoring by UAS is suitable for protected areas where there is no hunting management and where larger areas are under the supervision of a smaller number of people (Kellenberger et al. 2018). In addition to wildlife observations, UAS images are also used to assess the habitat quality of a particular study species (Olsoy et al. 2018).
In most studies, images obtained by UAS are most often processed by human observation or automated. Human counts of organisms in aerial imagery can be tedious and subjective, which in addition to flight range, regulatory frameworks, lack of validation (Christie et al. 2016) and in some cases increased disturbance of the studied wildlife (Barnas et al. 2018, Mulero- Pázmány et al. 2017, Krause et al. 2021) proved to be the main disadvantages of using UAS. To reduce human impact, automated approaches (Seymour et al. 2017) are used in the processing of UAS imagery. Using the automated approach in processing thermal photographs taken by UAS, the authors estimated the number of gray seal colonies (Halichoerus grypus) based on the temperature, size and shape of thermal signatures and obtained an accuracy of 95–98% of human estimate on the same processed photographs. Studies on common gull colony conducted by the extraction of individuals based on color and shape show 95.4–97.6% accuracy in relation to the visual census (Grenzdörffer 2013). In both visual and automated processing of UAS photographs, there are false-negative errors (availability and perception errors) and false-positive errors (misidentification and double count) that may be abundant estimates from UAS surveys (Brack et al. 2018). According to this study, errors in assessing the abundance of surveyed wildlife depend on how data are collected, flight plan, image processing, and reviewing procedures. Also, the error of automatic and manual counting using UAV images increases when the contrast is a counted animal and the background is low (Chabot and Francis 2016, Patterson et al. 2016). In addition to the above, the application of UAS in practical hunting management can be related to the assessment of damage from certain species of large game (Michez et al. 2016), damage from birds (Wandrie et al. 2019) or poaching control (Coulter et al. 2012, Linchant et al. 2015, Kellenberger et al. 2017).
One of the advantages of the new applications used in the pre-programmed flight is the possibility of multi-year flight and recording on the same transects. In addition to the absolute number with a certain error, thus covering the same area from year to year, it is possible to obtain data on the population trend of the studied species within a certain research period. By combining this data with data from other studies (such as silviculture, cover, climate data in individual years), it is possible to gain new insights into wildlife habitat interaction (Linchant et al. 2015).
3. Discussion
In the past decades, climatic extremes had brought major problems in sustainable management and the production of high-quality timber assortments, which resulted in differences between the planned and produced assortment structure of processed timber and between planned and realized production revenues (Đuka et al. 2021). The mentioned differences go to the extent that the silvicultural operations are carried out at the cost-effectiveness limit, that is, they become unprofitable (Paladinić et al. 2011). Developments in technology and the resulting improvements in forest inventories, in combination with better terrain information, i.e. terrain trafficability, have the potential to enable precision forestry (Holopainen et al. 2014), support operational planning, minimize the effect of harvesting operations on the environment and enhance time-consuming and physically demanding ground-based measuring in forest road management (Hrůza et al. 2016), one of the most expensive activities in forestry. Puliti et al. (2019) report that rapid growth in the use of UAS is prone to continue as they offer greater operational flexibility and can be used under a wider variety of atmospheric conditions even though civilian UAVs are currently constrained for use over areas of up to 10 km2 when complete coverage is required. According to Tang and Shao (2015), the benefits of UAS remote sensing include low material and operational costs, flexible control of spatial and temporal resolution, high-intensity data collection, and the absence of risk to crews. By investing little effort and money and using consumer-ready UAS with a high resolution RGB camera, it is possible to map even individual trees in mixed forests (Schiefer et al. 2020, Kámarek 2020). The main sensor for data collection on the UAS is the most important component of the system. The better the properties of the sensor are, it is more likely that it will allow for the higher and/or faster flight while achieving the same resolution, thus increasing the efficiency of the system. (Linchant et al. 2015). In forest monitoring, two main types of sensors are commonly used, digital cameras (RGB and multispectral) and LiDAR scanners (Linchant et al. 2015). Sensor accuracy and high spatial resolution have enabled research at the level of a single tree, vegetation morphological parameters, texture information and the vertical structure of trees (Wang et al. 2021), imposing a completely new concept of precision forestry (Schiefer et al. 2020, Weinstein et al. 2020, Zhen et al. 2016a, 2016b). In addition to sensors, another important factor influencing the speed and accuracy of the investigated parameter is the used data collection method and automated approach processing of captured photographs. Excluding subjectivity with automated processing approach to UAS imagery increases the efficiency and reduces the error. However, it has to be noted that output products can only be as accurate as input data. Apart from the sensor properties, the quality of data depends on the collection methodology, so using optimal methodology would improve the results, while it also might decrease processing time by reducing exaggerated overlap between the images.
The number of forest inventory studies based on the UAS data has significantly increased in the recent years. The development of the UAS systems and their ability to fly low, i.e. produce high spatial resolution products, lead to the transition from ABA approach to ITBA approach in forest inventory. UAS data proved to be sufficient for ABA variable estimation with the accuracy similar to ALS (Gianneti et al. 2019, Jurjević et al. 2019, Puliti et al. 2020), which is considered to be the most accurate and reliable data source for forest inventory. Compared to ALS, UAS data can provide highly detailed surface reconstruction of the object on the scene, therefore it can reconstruct the individual tree canopy with a high level of detail. The consequence is the high number of studies that focus on the individual tree parameter estimation rather than ABA approach. Among all the parameters, height is most frequently estimated. Several studies indicated that UAS can accurately measure the height of the tree, given that the accurate DTM is provided, or that sufficient ground can be reconstructed using the image data (Ganz et al., Jurjević et al. 2020).
Talbot et al. (2017) listed two main areas within which remote sensing technologies in forest operations can be discussed: 1) those relating to the operating environment determining the selection and use of machine systems and 2) those relating to forest operations themselves dealing with issues influencing e.g. productivity or data capture during the actual operations. Authors conclude that in an economic sense, the forestry sector is obliged to support developments and continuous improvements of new technologies that make management processes and operations more efficient, but always having in mind special demands with regards to etichs and data security. They conclude that detailed forest and personal information regarding ownership, management, personell, contractors, machines and research will be instantaneously accessible via the internet which will lead to continuous modernization of protocols for generating and handling of this data.
The use of UAS in forest fire prevention has already become a common practice in a growing number of countries. Thermal cameras are becoming more affordable and at the same time better technical characteristics enable the monitoring and prevention of larger spaces with the involvement of a smaller number of people (Ambrosia et al. 2002). The practical application of UAS in forest bug monitoring has been described in numerous studies (Otsu et al. 2018, Filho et al. 2019, Getzin et al. 2012). Also, the research by Martel et al. (2021) indicates the practical application of UAV as a good substitute for aircraft when it comes to treating or spraying egg parasitoid Trichogramma spp. when controlling eastern spruce budworm.
Today's trends in the use of UAS in wildlife monitoring involve various forms of thermal imaging counting for the purpose of determining population trends, abundance, seasonal presence, winter mortality, etc. (Chrétien et al. 2015, Chabot and Francis 2016, Williams et al. 2017, Chrétien et al. 2016, Ivosevic et al. 2015, Linchant et al. 2018, Johnston et al. 2017). In addition to limitations in flight range or the area that can be covered, as well as UAS legislation, the main problem with wildlife monitoring is the error in observations, which is greater, the lower the visibility and contrast are (Chabot and Francis 2016, Patterson et al. 2016, Terletzky and Koons 2016). In order to reduce the need for manpower, speed up the process and increase the efficiency of UAS photo processing, various forms of automatic counting or automatic counting with field data combination reduce the error of automatic approaches (Hodgson et al. 2017, Hodgson et al. 2016, Brack et al. 2018, Chabot et al. 2015, Gonzalez et al. 2016). Numerous studies dealing with the counting of bird colonies via UAS highlight the speed and accuracy of this approach. It is similar with open-field sowers where visualization is unobstructed. In wild ungulates monitoring, which is carried out within forest systems, the problem of detection from the air is vegetation, and in some cases the terrain configuration itself. In these situations, Bratsone et al. (2014) suggest the use of detection coefficients. The use of detection coefficients, assuming that the observed animals are randomly distributed in space, implies comparing the abundance with the detectable area in areas where, due to crowning or terrain characteristics, it is not possible to observe the researched individuals. In their study called Optimal Transport Theory, Kabir et al. (2021)use a larger number of aircraft equipped with cameras and onboard computers to identify animals in combination with GPS tracked animals, by which they get a 3.6 times higher detection rate of tracked animals compared to other UAS studies. Common to all studies focused on wildlife research are dominant linear transects that can be combined with field research and which are used to obtain the abundance of the studied species. In addition to direct counting, UAS are also used to support UHF monitoring (VonEhr et al. 2016, Soriano et al. 2009) and to model the habitat of the studied animals (Olsoy et al. 2018). With the development of sensors, it is to be expected that, in wildlife research and other remote sensing by UAS in forestry in the future, the emphasis will be on the development of automated models and logarithms for processing UAS imagery in order to reduce subjective error and reduce the impact of human census error on data.
4. Conclusions
The fast-growing UAS market ensures that aircraft, sensor, and driver manufacturers refine segments by improving performance for the same or even lower price to ensure competitiveness. With these benefits, among others, researchers get the opportunity to use better sensors, more precise GPS, UAV with greater autonomy, etc. Consequently, the results of UAS forestry sensing are becoming more and more precise and are slowly replacing the needs for people in the field, reducing the price and time for obtaining data, and ultimately reducing the risks. As a rule, the processed studies highlight the positive aspects of UAS technology with only minor shortcomings, such as limitations in flight range or noise produced by UAV in forest ecosystems. In the future, it is to be expected that the focus of development will be placed on automated approaches in UAS imagery processing, which will further reduce the need for manpower and minimize subjective errors.
Acknowledgements
This work has been supported in part by the Croatian Science Foundation under the project »Quantity and structure of fir and spruce biomass in changed climatic conditions« (UIP-2019-04-7766).
5. References
Ambarlı, H., Mengüllüoğlu, D., Fickel, J., Förster, D. W., 2018: Population genetics of the main population of brown bears in southwest Asia. PeerJ 6: e5660. https://doi.org/10.7717/peerj.5660
Ambrosia, V.G., Wegener, S.S., Sullivan, D.V., Buechel, S.W., Brass, J.A., Dunagan, S.E., Brass, J.A., Stoneburner, J., Schoenung, S.M., 2002: Demonstrating UAV-Acquired Real-Time Thermal Data over Fires. Photogramm Eng Rem S 69(4): 391–402. https://doi.org/10.14358/PERS.69.4.391
Anderson, K, Gaston, K.J., 2013: Lightweight unmanned aerial vehicles will revolutionize spatial ecology. Front Ecol Environ 11(3): 138–146. https://doi.org/10.1890/120150
Aricak, B., 2015: Using remote sensing data to predict road fill areas and areas affected by fill erosion with planned forest road construction: a case study in Kastamonu Regional Forest Directorate (Turkey). Environ Monit Assess 187(7): 1–10. https://doi.org/10.1007/s10661-015-4663-7
Arona, L., Dale, J., Heaslip, S.G., Hammill, M.O., Johnston, D.W., 2018: Assessing the disturbance potential of small unoccupied aircraft systems (UAS) on gray seals (Halichoerus grypus) at breeding colonies in Nova Scotia Canada. PeerJ 6: e4467. https://doi.org/10.7717/peerj.4467
Balenović, I., Jurjević, L., Šimić Milas, A., Gašparović, M., Ivanković, D., Seletković, A., 2019: Testing the Applicability of the Official Croatian DTM for Normalization of UAV-based DSMs and Plot-level Tree Height Estimations in Lowland Forests. Croat J For Eng 40(1): 163–174.
Balenović, I., Šimić Milas, A., Marjanović, H., 2017: A Comparison of Stand-Level Volume Estimates from Image-Based Canopy Height Models of Different Spatial Resolutions. Remote Sens–Basel 9(3): 205. https://doi.org/10.3390/rs9030205
Barnas, A., Newman, R., Felege, C.J., Corcoran, M.P., Hervey, S.D., Stechmann, T.J., Ellis‐Felege, S.N., 2018: Evaluating behavioral responses of nesting lesser snow geese to unmanned aircraft surveys. Ecol Evol 8(2): 1328–1338. https://doi.org/10.1002/ece3.3731
Baumann, M., Ozdoga, M., Wolter, P.T., Krylov, A., Vladimirova, N., Radeloff, C., 2014: Landsat remote sensing of forest windfall disturbance. Remote Sensing of Environment 143: 171–179. https://doi.org/10.1016/j.rse.2013.12.020
Brack, I.V., Kindel, A., Oliveira, L.F.B., 2018: Detection errors in wildlife abundance estimates from Unmanned Aerial Systems (UAS) surveys: synthesis, solutions, and challenges. Methods Ecol Evol 9(8): 1864–1873. https://doi.org/10.1111/2041-210X.13026
Brinkman, M.P., Garcelon, D.K., 2020: Applying UAV Systems in Wildlife Management. In Proceedings of the Vertebrate Pest Conference 29: 4 p. https://escholarship.org/uc/item/42s2d8q9
Caniglia, R., 2008: Non-onvasive genetics and wolf Canis lupus population size estimation in the Northern Italian Apennines. Doctoral Thesis, Alma Mater Studiorum – Università di Bologna – Istituto Nazionale per la Fauna Selvatica, 84 p.
Cao, L., Liu, H., Fu, X., Zhang, Z., Shen, X., Ruan, H., 2019: Comparison of UAV LiDAR and digital aerial photogrammetry point clouds for estimating forest structural attributes in subtropical planted forests. Forests 10(2): 145. https://doi.org/10.3390/f10020145
Chabot, D., Bird, D.M., 2015: Wildlife research and management methods in the 21st century: Where do unmanned aircraft fit in? Journal of Unmanned Vehicle Systems 3(4): 137–155. https://doi.org/10.1139/juvs-2015-0021
Chabot, D., Craik, S.R., Bird, D.M., 2015: Population census of a large common tern colony with a small unmanned aircraft. PLoS ONE 10(4): e0122588. https://doi.org/10.1371/journal.pone.0122588
Chabot, D., Francis, C.M., 2016: Computer-automated bird detection and counts in high-resolution aerial images: A review. J Field Ornith 87(4): 343–359. https://doi.org/10.1111/jofo.12171
Chrétien, L.P., Théau, J., Ménard, P., 2015: Wildlife multispecies remote sensing using visible and thermal infrared imagery acquired from an unmanned aerial vehicle (UAV). ISPRS –International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences XL-1/W4: 241–248. https://doi.org/10.5194/isprsarchives-xl-1-w4-241–2015
Chrétien, L.-P., Théau, J., Ménard, P., 2016: Visible and thermal infrared remote sensing for the detection of white-tailed deer using an unmanned aerial system. Wildlife Society Bulletin 40(1): 181–191. https://doi.org/10.1002/wsb.629
Christie, K.S., Gilbert, S.L., Brown, C.L., Hatfield, M., Hanson, L., 2016: Unmanned aircraft systems in wildlife research: current and future applications of a transformative technology. Front Ecol Environ 14(5): 241–251. https://doi.org/10.1002/fee.1281
Christopher, E.A., Visser, R., 2007: Methodology for evaluating post harvest erosion risk for the protection of water quality. New Zealand Journal of Forestry 52(2): 20–25.
Ciesielski, M., Bałazy, R., Hycza, T., Bruchwald, A., Dmyterko, E., 2016: Estimating the damage caused by the wind in the forest stands using satellite imagery and data from the State Forests Information Systems. Sylwan 160(5): 371–377.
Coulter, L., Stow, D., Tsai, Y.H., Chavis, C., Lippit, C., Fraley, G., McCreight, R., 2012: Automated detection of people and vehicles in natural environments using high temporal resolution airborne remote sensing. In: Proceedings of the ASPRS annual conference. Scramento, California, USA, March 19–23.
De Vivo, F., Battipede, M., Johnson, E., 2021: Infra-red line camera data-driven edge detector in UAV forest fire monitoring. Aerosp Sci Technol 111: 106574. https://doi.org/10.1016/j.ast.2021.106574
Dudek, M., Tomczyk, P., Wygonik, P., Korkosz, M., Bogusz, P., Lis, B., 2013: Hybrid fuel cell—battery system as a main power unit for small unmanned aerial vehicles (UAV). Int J Electrochem Sci 8(6): 8442–8463.
Đuka, A., Bumber, Z., Poršinsky, T., Papa, I., Pentek, T., 2021: The Influence of Increased Salvage Felling on Forwarding Distance and the Removal – A Case Study from Croatia. Forests 12(1): 7. https://doi.org/10.3390/f12010007
Einzmann, K., Immitzer, M., Bock, S., Bauer, O., Schmitt, A., Atzberger, C., 2017: Windthrow Detection in European Forests with Very High-Resolution Optical Data. Forests 8(1): 21. https://doi.org/10.3390/f8010021
Faltán, V., Katina, S., Bánovský, M., Pazúrová, Z., 2009: The influence of site conditions on the impact of windstorms on forests: The case of the high tatras foothills (Slovakia) in 2004. Morav Geogr Rep 17(3): 10–18.
Fortuna, P., Maier, N., Holobaca, I.H., 2013: Windthrow detection by satellite images and effect assessment. Present Environment and Sustainable Development 7(1): 188–199.
Fransson, J.E.S., Walter, F., Blennow, K., Gustavsson, A., Ulander, L.M.H., 2002: Detection of Storm-Damaged Forested Areas Using Airborne CARABAS-II VHF SAR Image Data. IEEE Transactions on Geoscience and Remote Sensing 40(10): 2170–2175. https://doi.org/10.1109/TGRS.2002.804913
Frolking, S., Palace, M.W., Clark, D.B., Chambers, J.Q., Hugart, H.H., Hurtt, G.C., 2009: Forest Disturbance and Recovery: a General Review in the Context of Spaceborne Remote Sensing of Impacts on Above ground Biomass and Canopy Structure. J Geophys Res: Biogeosciences 114(G2): 1–27. https://doi.org/10.1029/2008JG000911
Fust, P., Loos, J., 2020: Development perspectives for the application of autonomous, unmanned aerial systems (UASs) in wildlife conservation. Biological Conservation 241: 108380. https://doi.org/10.1016/j.biocon.2019.108380
Gancz, V., Apostol, B., Petrila, M., Lorent, A., 2010: The windthrow detection based on satellite imagery and the assessment of their effects. Revista Pădurilor 125(6): 30–36.
Ganz, S., Käber, Y., Adler, P., 2019: Measuring tree height with remote sensing – a comparison of photogrammetric and LiDAR data with different field measurements. Forests 10(8): 694. https://doi.org/10.3390/f10080694
Gardiner, B., Blennow, K., Carnus, J.M., Fleischer, P., Ingemarson, F., Landman, G., Lindner, M., Marzano, M., Nicoll, B., Orazio, C., Peyron, J-L., Reviron, M-P., Schelhaas, M-J., Schuck, A., Spielmann, M., Usbeck, T., 2010: Destructive Storms in European Forests: Past and Forthcoming Impacts. Final Report to European CommissioneDG Environment; European Forest Institute (EFIATLANTIC): Cestas, France, 138 p.
Gardiner, B., Schuck, A., Schelhaas, M.J., Orazio, C., Blennow, K., Nicoll, B., 2013: Living with Storm Damage to Forests. In: What Science Can Tell Us No. 3. European Forest Institute, 129 p.
Getzin, S., Nuske, R.S., Wiegand, K., 2014: Using Unmanned Aerial Vehicles (UAV) to Quantify Spatial Gap Patterns in Forests. Remote Sens–Basel 6(8): 6988–7004. https://doi.org/10.3390/rs6086988
Getzin, S., Wiegand, K., Schoning, I., 2012: Assessing Biodiversity in Forests Using very High-Resolution Images and Unmanned Aerial Vehicles. Methods Ecol Evol 3(2): 397–404. https://doi.org/10.1111/j.2041-210X.2011.00158.x
Giannetti, F., Chirici, G., Gobakken, T., Næsset, E., Travaglini, D., Puliti, S., 2018: A new approach with DTM-independent metrics for forest growing stock prediction using UAV photogrammetric data. Remote Sens Environ 213: 195–205. https://doi.org/10.1016/j.rse.2018.05.016
Gonzalez, L.F., Montes, G.A., Puig, E., Johnson, S., Mengersen, K., Gaston, K.J., 2016: Unmanned aerial vehicles (UAVs) and artificial intelligence revolutionizing wildlife monitoring and conservation. Sensors 16(1): 97. https://doi.org/10.3390/s16010097
Grenzdörffer, G.J., 2013: UAS-based automatic bird count of a common gull colony. In: International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences. XL–1/W2: 169–174. https://doi.org/10.5194/isprsarchives-XL-1-W2-169-2013
Groom, G., Stjernholm, M., Nielson, R.D., Fleetwood, A., Petersen, I.K. 2013: Remote sensing image data and automated analysis to describe marine bird distributions and abundances. Ecol Inform 14: 2–8. https://doi.org/10.1016/j.ecoinf.2012.12.001
Hardin, P.J., Jensen, R.R., 2011: Small-scale unmanned aerial vehicles in environmental remote sensing: challenges and opportunities. GIScience and Remote Sens–Basel 48(1): 99–111. https://doi.org/10.2747/1548-1603.48.1.99
Hillman, S., Wallace, L., Lucieer, A., Reinke, K., Turner, D., Jones, S., 2021: A comparison of terrestrial and UAS sensors for measuring fuel hazard in a dry sclerophyll forest. Int J Appl Earth Obs 95: 102261. https://doi.org/10.1016/j.jag.2020.102261
Hodgson, A., Peel, D., Kelly, N., 2017: Unmanned aerial vehicles for surveying marine fauna: Assessing detection probability. Ecol Appl 27(4): 1253–1267. https://doi.org/10.1002/eap.1519
Hodgson, J.C., Baylis, S.M., Mott, R., Herrod, A., Clarke, R.H., 2016: Precision wildlife monitoring using unmanned aerial vehicles. Sci Rep–UK 6(1): 22574. https://doi.org/10.1038/srep22574
Holopainen, M., Vastaranta, M., Hyyppä, J., 2014: Outlook for the Next Generation’s Precision Forestry in Finland. Forests 5(7): 1682–1694. https://doi.org/10.3390/f5071682
Hrůza, P., Mikita, T., Janata, P., 2016: Monitoring of forest hauling roads wearing course damage using unmanned aerial systems. Acta Universitatis Agriculturae et Silviculturae Mendelianae Brunensis 64(5): 1537–1546. http://dx.doi.org/10.11118/actaun201664051537
Hu, T., Sun, X., Su, Y., Guan, H., Sun, Q., Kelly, M., Guo, Q., 2021: Development and Performance Evaluation of a Very Low-Cost UAV-Lidar System for Forestry Applications. Rem Sens–Basel 13(1): 77. https://doi.org/10.3390/rs13010077
Hycza, T., Ciesielski, M., Zasada, M., Bałazy, R., 2019: Application of Black-Bridge Satellite Imagery for the Spatial Distribution of Salvage Cutting in Stands Damaged by Wind. Croat J For Eng 40(1): 125–138.
Hyyppä, E., Hyyppä, J., Hakala, T., Kukko, A., Wulder, M.A., White, J.C., Pyörälä, J., Yu, X., Wang, Y., Virtanen, J.P., Pohjavirta, O., 2020: Under-canopy UAV laser scanning for accurate forest field measurements. ISPRS Journal of Photogrammetry and Remote Sensing 164: 41–60. https://doi.org/10.1016/j.isprsjprs.2020.03.021
Iost Filho, F.H., Heldens, W.B., Kong, Z., de Lange, E.S., 2020: Drones: Innovative technology for use in precision pest management. J Econ Entomol 113(1): 1–25. https://doi.org/10.1093/jee/toz268
Israël, M., 2011: A UAV-based roe deer fawn detection system. International Archives of the Photogrammetry. Remote Sensing and Spatial Information Sciences XXXVIII-1: 51–55. https://doi.org/10.5194/isprsarchives-XXXVIII-1-C22-51-2011
Ivosevic, B., Han, Y.G., Cho, Y., Kwon, O., 2015: The use of conservation drones in ecology and wildlife research. J Ecol Environ 38(1): 113–118. https://doi.org/10.5141/ecoenv.2015.012
Jacobson, H.A., Kroll, J.C., Browning, R.W., Koerth, B.H., Conway, M.H., 1997: Infrared-triggered cameras for censusing white-tailed deer. Wildlife Soc B. 25: 547–556.
Johnston, D.W., Dale, J., Murray, K.T., Josephson, E., Newton, E., Wood, S., 2017: Comparing occupied and unoccupied aircraft surveys of wildlife populations: assessing the gray seal (Halichoerus grypus) breeding colony on Muskeget Island, USA. Journal of Unmanned Vehicle Systems 5(4): 178–191. https://doi.org/10.1139/juvs-2017-0012
Jurjević, L., Gašparović, M., Liang, X., Balenović, I., 2021: Assessment of Close-Range Remote Sensing Methods for DTM Estimation in a Lowland Deciduous Forest. Remote Sens–Basel 13(11): 2063. https://doi.org/10.3390/rs13112063
Jurjević, L., Gašparović, M., Milas, A.S., Balenović, I., 2020a: Impact of UAS image orientation on accuracy of forest inventory attributes. Remote Sens–Basel 12(3): 404. https://doi.org/10.3390/rs12030404
Jurjević, L., Liang, X., Gašparović, M., Balenović, I., 2020b: Is field-measured tree height as reliable as believed – Part II, A comparison study of tree height estimates from conventional field measurement and low-cost close-range remote sensing in a deciduous forest. ISPRS Journal of Photogrammetry and Remote Sensing 169: 227–241. https://doi.org/10.1016/j.isprsjprs.2020.09.014
Kabir, R.H., Lee, K., 2021: Wildlife Monitoring Using a Multi-UAV System with Optimal Transport Theory. Applied Sciences 11(9): 4070. https://doi.org/10.3390/app11094070
Karanth, K.U., Nichols, J.D., Kumar N.S., Hines, J.E., 2006: Assessing tiger population dynamics using photographic capture‐recapture sampling. Ecology 87(11): 2925–2937. https://doi.org/10.1890/0012-9658(2006)87[2925:ATPDUP]2.0.CO;2
Kellenberger, B., Marcos, D., Tuia, D., 2018: Detecting mammals in UAV images: Best practices to address a substantially imbalanced dataset with deep learning. Remote Sens Environ 216: 139–153. https://doi.org/10.1016/j.rse.2018.06.028
Koloman, P., Strelec, L., 2013: Time minimizing transportation of calamity fallen timber. AIP Conf. Proc. 1558(1): 1843–1846. https://doi.org/10.1063/1.4825888
Komárek, J., 2020: The perspective of unmanned aerial systems in forest management. Do we really need such details? Appl Veg Sci 23(4): 718–721. https://doi.org/10.1111/ avsc.12503
Krause, D.J., Hinke, J.T., Goebel, M.E., Perryman, W.L., 2021: Drones Minimize Antarctic Predator Responses Relative to Ground Survey Methods: An Appeal for Context in Policy Advice. Frontiers in Marine Science 8: 152. https://doi.org/10.3389/fmars.2021.648772
Krause, S., Sanders, T.G.M., Mund, J.P., Greve, K., 2019: UAV-based photogrammetric tree height measurement for intensive forest monitoring. Remote Sens–Basel 11(7): 758. https://doi.org/10.3390/rs11070758
Kuželka, K., Slavík, M., Surový, P., 2020: Very High Density Point Clouds from UAV Laser Scanning for Automatic Tree Stem Detection and Direct Diameter Measurement. Remote Sensing 12(8): 1236. https://doi.org/10.3390/rs12081236
Laliberte, A.S., Ripple, J.P., 2003: Automated wildlife counts from remotely sensed imagery. Wildlife Soc B 31(2): 362–371.
Lancia, R.A., Kendall, W.L., Pollock, K.H. Nichols, J.D., 2005: Estimating the number of animals in wildlife populations. In Braun, C. E. (ed) Techniques for Wildlife Investigations and Management. Wildlife Society, Bethesda, Maryland, 106–153.
LaRue, M.A., Rotella, J.J., Garrott, R.A., 2011: Satellite imagery can be used to detect variation in abundance of Weddell seals (Leptonychotes weddellii) in Erebus Bay, Antarctica. Polar Biol 34(11): 1727. https://doi.org/10.1007/s00300-011-1023-0
Liang, X., Wang, Y., Pyörälä, J., Lehtomäki, M., Yu, X., Kaartinen, H., Kukko, A., Honkavaara, E., Issaoui, A.E., Nevalainen, O., Vaaja, M., 2019: Forest in situ observations using unmanned aerial vehicle as an alternative of terrestrial measurements. Forest Ecosystems 6(1): 1–16. https://doi.org/10.1186/s40663-019-0173-3
Linchant, J., Lhoest, S., Quevauvillers, S., Lejeune, P., Vermeulen, C., Semeki Ngabinzeke, J., Bouché, P., 2018: UAS imagery reveals new survey opportunities for counting hippos. PloS one 13(11): 1–17. https://doi.org/10.1371/journal.pone.0206413
Linchant, J., Lhoest, S., Quevauvillers, S., Semeki, J., Lejeune, P., Vermeulen, C., 2015a: WIMUAS: Developing a tool to review wildlife data from various UAS flight plans. International Archives of the Photogrammetry. Remote Sensing and Spatial Information Sciences XL-3/W3: 379–384. https://doi.org/10.5194/isprsarchives-XL-3-W3-379-2015
Linchant, J., Lisein, J., Semeki, J., Lejeune, P., Vermeulen, C., 2015b: Are unmanned aircraft systems (UAS s) the future of wildlife monitoring? A review of accomplishments and challenges. Mammal Rev 45(4): 239–252. https://doi.org/10.1111/mam.12046
Lisein, J., Linchant, J., Lejeune, P., Bouché, P., Vermeulen, C., 2013a: Aerial surveys using an unmanned aerial system (UAS): comparison of different methods for estimating the surface area of sampling strips. Trop Conserv Sci 6(4): 506–520. https://doi.org/10.1177%2F194008291300600405
Lisein, J., Pierrot-Deseilligny, M., Bonnet, S., Lejeune, P., 2013b: A photogrammetric workflow for the creation of a forest canopy height model from small unmanned aerial system imagery. Forests 4(4): 922–944. https://doi.org/10.3390/f4040922
Mangewa, L.J., Ndakidemi, P.A., Munishi, L.K., 2019: Integrating UAV Technology in an Ecological Monitoring System for Community Wildlife Management Areas in Tanzania. Sustainability 11(21): 6116. https://doi.org/10.3390/su11216116
Martel, V., Johns, R.C., Jochems-Tanguay, L., Jean, F., Maltais, A., Trudeau, S., St-Onge, M., Cormier, D., Smith, S.M., Boisclair, J., 2021: The Use of UAS to Release the Egg Parasitoid Trichogramma spp. (Hymenoptera: Trichogrammatidae) Against an Agricultural and a Forest Pest in Canada. J Econom Entomol, 114(5): 1867–1881. https://doi.org/10.1093/jee/toaa325
Matosiuk, M., Śmietana, W., Czajkowska, M., Paule, L., Štofik, J., Krajmerová, D., Bashta, A.-T., Jakimiuk, S., Ratkiewicz, M., 2019: Genetic differentiation and asymmetric gene flow among Carpathian brown bear (Ursus arctos) populations – Implications for conservation of transboundary populations. Ecology and evolution 9(3): 1501–1511. https://doi.org/10.1002/ece3.4872
Michez, A., Morelle, K., Lehaire, F., Widar, J., Authelet, M., Vermeulen, C., Lejeune, P., 2016: Use of unmanned aerial system to assess wildlife (Sus scrofa) damage to crops (Zea mays). Journal of Unmanned Vehicle Systems 4(4): 266–275. https://doi.org/10.1139/juvs-2016-0014
Mikita, T., Janata, P., Surovỳ, P., 2016: Forest stand inventory based on combined aerial and terrestrial close-range photogrammetry. Forests 7(8): 1–14. https://doi.org/10.3390/f7080165
Miller, C.R., Joyce, P., Waits, L.P., 2005: A new method for estimating the size of small populationsfrom genetic mark–recapture data. Mol Ecol 14(7): 1991–2005. https://doi.org/10.1111/j.1365-294X.2005.02577.x
Mokroš, M., Výbošťok, J., Merganič, J., Hollaus, M., Barton, I., Koreň, M., Tomaštík, J., Čerňava, J., 2017: Early Stage Forest Windthrow Estimation Based on Unmanned Aircraft System Imagery. Forests8(9): 306. https://doi.org/10.3390/f8090306
Mulero-Pázmány, M., Jenni-Eiermann, S., Strebel, N., Sattler, T., Negro, J.J., Tablado, Z., 2017: Unmanned aircraft systems as a new source of disturbance for wildlife: A systematic review. PloS one 12(6): e0178448. https://doi.org/10.1371/journal.pone.0178448
Muller, C.G., Chilvers, B.L., Barker, Z., Barnsdale, K.P., Battley, P.F., French, R.K., Samandari, F., 2019: Aerial VHF tracking of wildlife using an unmanned aerial vehicle (UAV): comparing efficiency of yellow-eyed penguin (Megadyptes antipodes) nest location methods. Wildlife Res 46(2): 145–153. https://doi.org/10.1071/WR17147
Næsset, E., 2014: Area-Based Inventory in Norway – From Innovation to an Operational Reality. In: Forestry Applications of Airborne Laser Scanning. Managing Forest Ecosystems (Maltamo M., Næsset E., Vauhkonen J., eds.), Springer, Dordrecht, 215–240 p. https://doi.org/10.1007/978-94-017-8663-8_11
Nevalainen, P., Salmivaara, A., Ala-Ilomäki, J., Launiainen, S., Hiedanpää, J., Finér, L., Pahikkala, T., Heikkonen, J., 2017: Estimating the rut depth by UAV photogrammetry. Remote Sens–Basel 9(12): 1279. https://doi.org/10.3390/rs9121279
Ollero, A., Merino, L., 2006: Unmanned Aerial Vehicles as Tools for Forest-Fire Fighting. Forest Ecol Manag 234(1): 263–74.
Olsoy, P.J., Shipley, L.A., Rachlow, J.L., Forbey, J.S., Glenn, N.F., Burgess, M.A., Thornton, D.H., 2018: Unmanned aerial systems measure structural habitat features for wildlife across multiple scales. Methods Ecol Evol 9(3): 594–604. https://doi.org/10.1111/2041-210X.12919
Ørka, H.O., Bollandsås, O.M., Hansen, E.H., Næsset, E., Gobakken,T., 2018: Effects of terrain slope and aspect on the error of ALS-based predictions of forest attributes. Forestry 91(2): 225–237. https://doi.org/10.1093/forestry/cpx058
Ota, T., Ogawa, M., Mizoue, N., Fukumoto, K., Yoshida, S., 2017: Forest Structure Estimation from a UAV-Based Photogrammetric Point Cloud in Managed Temperate Coniferous Forests. Forests 8(9): 343. https://doi.org/10.3390/f8090343
Otsu, K., Pla, M., Vayreda, J., Brotons, L., 2018: Calibrating the severity of forest defoliation by pine processionary moth with Landsat and UAV imagery. Sensors 18(10): 3278. https://doi.org/10.3390/s18103278
Owen, P.A., 2011: When the ravens met the sandhill cranes USGS and USFWS team turns to unmanned aircraft to count wildlife. Unmanned Systems 29: 20–23.
Paladinić, E., Štimac, D., Marjanović, H., Balenović, I., Ostrogović, M.Z., 2011: Production Aspect of Silver Fir (Abies alba Mill.) Dieback on Example of a Few Beech-Fir Stands. Šumarski list 135(13): 248–263.
Panagiotidis, D., Abdollahnejad, A., Surový, P., Chiteculo, V., 2017: Determining tree height and crown diameter from high-resolution UAV imagery. Int J Remote Sens 38(8–10): 2392–2410. https://doi.org/10.1080/01431161.2016.1264028
Paneque-Gálvez, J., McCall, M., Napoletano, B., Wich, S., Koh, L., 2014: Small drones for community-based forest monitoring: An assessment of their feasibility and potential in tropical areas. Forests 5(6): 1481–1507. https://doi.org/10.3390/f5061481
Patterson, C., Koski, W., Pace, P., McLuckie, B., Bird, D.M., 2016: Evaluation of an unmanned aircraft system for detecting surrogate caribou targets in Labrador. Journal of Unmanned Vehicle Systems 4(1): 53–69. https://doi.org/10.1139/juvs-2015–0014
Pierzchała, M., Talbot, B., Astrup, R., 2014: Estimating soil displacement from timber extraction trails in steep terrain: application of an unmanned aircraft for 3D modelling. Forests 5(6): 1212–1223. https://doi.org/10.3390/f5061212
Pierzchała, M., Talbot, B., Astrup, R., 2016: Measuring wheel ruts with close-range photogrammetry. Forestry 89(4): 383–391. https://doi.org/10.1093/forestry/cpw009
Platonov, N.G., Mordvintsev, I.N., Rozhnov, V.V., 2013: The possibility of using high resolution satellite images for detection of marine mammals. Biology Bulletin 40(2): 197–205. https://doi.org/10.1134/S1062359013020106
Plhal, R., Kamler, J., Homolka, M., Adamec, Z., 2011: An assessment of the applicability of photo trapping to estimate wild boar population density in a forest environment. Folia Zool 60(3): 237–246. https://doi.org/10.25225/fozo.v60.i3.a8.2011
Puliti, S., Dash, J.P., Watt, M.S., Breidenbach, J., Pearse, G.D., 2020: A comparison of UAV laser scanning, photogrammetry and airborne laser scanning for precision inventory of small-forest properties. Forestry 93(1): 150–162. https://doi.org/10.1093/forestry/cpz057
Puliti, S., Ørka, H.O., Gobakken, T., Næsset, E., 2015: Inventory of Small Forest Areas Using an Unmanned Aerial System. Remote Sens–Basel 7(8): 9632–9654. https://doi.org/10.3390/rs70809632
Schiefer, F., Kattenborn, T., Frick, A., Frey, J., Schall, P., Koch, B., Schmidtlein, S., 2020: Mapping forest tree species in high resolution UAV-based RGB-imagery by means of convolutional neural networks. ISPRS Journal of Photogrammetry and Remote Sensing 170: 205–215. https://doi.org/10.1016/j.isprsjprs.2020.10.015
SEF, 2020: State of Europe’s Forests 2020. Ministerial Conference on the Protection of Forests in Europe – FOREST EUROPE, 394 p.
Seymour, A.C., Dale, J., Hammill, M., Halpin, P.N., Johnston, D.W., 2017: Automated detection and enumeration of marine wildlife using unmanned aircraft systems (UAS) and thermal imagery. Sci Rep–UK 7(1): 1–10. https://doi.org/10.1038/srep45127
Shafer, M.W., Vega, G., Rothfus, K., Flikkema, P., 2019: UAV wildlife radiotelemetry: System and methods of localization. Methods Ecol Evol 10(10): 1783–1795. https://doi.org/10.1111/2041-210X.13261
Shahbazi, M., Théau, J., Ménard, P., 2014: Recent applications of unmanned aerial imagery in natural resource management. GISci Remote Sens. 5 (4): 339–365. https://doi.org/10.1080/15481603.2014.926650
Shao, G.F., 2012: Remote sensing. In: El-Shaarawi A-H, Piegorsch W (eds) Encyclopedia of environmetrics, 2nd edn. Wiley, Chichester, 2187–2193 p.
Shen, X., Cao, L., Yang, B., Xu, Z., Wang, G., 2019: Estimation of forest structural attributes using spectral indices and point clouds from UAS-based multispectral and RGB imageries. Remote Sens–Basel 11(7): 800. https://doi.org/10.3390/rs11070800
Smigaj, M., Gaulton, R., Barr, S.L., Suárez, J.C., 2015: UAV-borne thermal imaging for forest health monitoring: detecting of disease-induced canopy temperature increase. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences XL-3/W3: 349–354. https://doi.org/10.5194/isprsarchives-XL-3-W3-349-2015
Soriano, P., Caballero, F., Ollero, A., de Tecnologıas Aeroespaciales, C.A., 2009: RF-based particle filter localization for wildlife tracking by using an UAV. In International Symposium of Robotics, Barcelona 10–13 March, (Eds.) Basañes, L., Suárez, R., Rosell, J., 7 p.
Sutherland, W.J., 2006: Ecological Census Techniques: a handbook, Second edition. Cambridge University Press, The Edinburgh Building, Cambridge, 432 p.
Talbot, B., Astrup, R., 2021: A review of Sensors, Sensor-Platforms and Methods Used in 3D Modelling of Soil Displacement after Timber Harvesting. Croat J For Eng 42(1): 149–164. https://doi.org/10.5552/crojfe.2021.837
Talbot, B., Nowell, T., Berg, S., Astrup, R., Routa, J., Väätäinen, K., Ala-Ilomäki, J., Lindeman, H., Prinz, R., 2020: Continuous surface assessments of wheel rutting compared to discrete point measurements – do the benefits justify the efforts? In: Proceedings of the Nordic-Baltic Conference on Forest Operations for the Future, September 22–24, Elsinore, Denmark.
Talbot, B., Pierzchała, M., Astrup, R., 2017: Applications of remote and proximal sensing for improved precision in forest operations. Croat J For Eng 38(2): 327–336.
Talbot, B., Rahlf, J., Astrup, R., 2018: An operational UAV-based approach for stand-level assessment of soil disturbance after forest harvesting. Scand J Forest Res 33(4): 387–396. https://doi.org/10.1080/02827581.2017.1418421
Tang, L., Shao, G., 2015: Drone Remote Sensing for Forestry Research and Practices: Review Article. J Forestry Res 26(4): 791–797. https://doi.org/10.1007/s11676-015-0088-y
Terletzky, P.A., Koons, D.N., 2016: Estimating ungulate abundance while accounting for multiple sources of observation error. Wildlife Soc B 40(3): 525–536. https://doi.org/10.1002/wsb.672
Tomljanović, K., Grubešić, M., Krapinec, K. 2010: Testiranje primjenjivosti digitalnih senzornih kamera za praćenje divljači i ostalih životinjskih vrsta. Šumarski list 134(5–6): 287–292.
Tomljanović, K., Nosek, H., Pernar, R., Grubešić, M., 2018: Mogućnosti primjene lakih bespilotnih letjelica u prebrojavanju krupne divljači. Šumarski list 142(11–12): 621–626. https://doi.org/10.31298/sl.142.11-12.6
Tuominen, S., Balazs, A., Honkavaara, E., Pölönen, I., Saari, H., Hakala, T., Viljanen, N., 2017: Hyperspectral UAV-imagery and photogrammetric canopy height model in estimating forest stand variables. Silva Fennica 51(5): 7721. https://doi.org/10.14214/sf.7721
Tuominen, S., Balazs, A., Saari, H., Pölönen, I., Sarkeala, J., Viitala, R., 2015: Unmanned aerial system imagery and photogrammetric canopy height data in area-based estimation of forest variables. Silva Fennica 49(5): 1348. https://doi.org/10.14214/sf.1348
VonEhr, K., Hilaski, S., Dunne, B.E., Ward, J., 2016: Software defined radio for direction-finding in UAV wildlife tracking. In 2016 IEEE International Conference on Electro Information Technology (EIT), 464–469 p.
Wallace L.O., Lucieer, A., Turner, D., Watson, C., 2011: Error assessment and mitigation for hyper-temporal UAV-borne LiDAR surveys of forest inventory. In: Proceedings of SilviLaser. Hobart, Tasmania, Australia.
Wallace, L.O., Lucieer, A., Malenovský, Z., Turner, D., Vopěnka, P., 2016: Assessment of Forest Structure Using Two UAV Techniques: A Comparison of Airborne Laser Scanning and Structure from Motion (SfM) Point Clouds. Forests 7(3): 62. https://doi.org/10.3390/f7030062
Wandrie, L.J., Klug, P.E., Clark, M.E., 2019: Evaluation of two unmanned aircraft systems as tools for protecting crops from blackbird damage. Crop Prot 117: 15–19. https://doi.org/10.1016/j.cropro.2018.11.008
Wang, X., Wang, Y., Zhou, C., Yin, L., Feng, X., 2021: Urban forest monitoring based on multiple features at the single tree scale by UAV. Urban Forestry and Urban Greening 58: 126958. https://doi.org/10.1016/j.ufug.2020.126958
Wang, Y., Lehtomäki, M., Liang, X., Pyörälä, J., Kukko, A., Jaakkola, A., Liu, J., Feng, Z., Chen, R., Hyyppä, J., 2019: Is field-measured tree height as reliable as believed–A comparison study of tree height estimates from field measurement, airborne laser scanning and terrestrial laser scanning in a boreal forest. ISPRS journal of photogrammetry and remote sensing 147: 132–145. https://doi.org/10.1016/j.isprsjprs.2018.11.008
Watts, A.C., Perry, J.H., Smith, S.E., Burgess, M.A., Wilkinson, B.E., Szantoi, Z., Ifju, P.G., Percival, H.F., 2010: Small unmanned aircraft systems for low-altitude aerial surveys. The Journal of Wildlife Management 74(7): 1614–1619. https://doi.org/10.2193/2009-425
Weinstein, B.G., Marconi, S., Bohlman, S.A., Zare, A., White, E.P., 2020: Cross-site learning in deep learning RGB tree crown detection. Ecol Inf 56: 101061 https://doi.org/10.1016/j.ecoinf.2020.101061
White, J.C., Coops, N.C., Wulder, M.A., Vastaranta, M., Hilker, T., Tompalski P., 2016: Remote Sensing Technologies for Enhancing Forest Inventories: A Review. Can J Remote Sens 42(5): 619–641. https://doi.org/10.1080/07038992.2016.1207484
Whitehead, K., Hugenholtz, C.H., 2014a: Remote sensing of the environment with small unmanned aircraft systems (UASs), part 1: A review of progress and challenges. J Unmanned Veh Sys. 2(3): 69–85. https://doi.org/10.1139/juvs-2014-0006
Whitehead, K., Hugenholtz, C.H., Myshak, S., Brown, O., LeClair, A., Tamminga, A., Barchyn, T.E., Moorman, B., Eaton, B., 2014b: Remote sensing of the environment with small unmanned aircraft systems (UASs), part 2: Scientific and commercial applications. Journal of Unmanned Vehicle Systems 2(3): 86–102. https://doi.org/10.1139/juvs-2014-0007
Williams, P.J., Hooten, M.B., Womble, J N., Bower, M.R., 2017: Estimating occupancy and abundance using aerial images with imperfect detection. Methods Ecol Evol 8(12): 1679–1689. https://doi.org/10.1111/2041-210X.12815
Woods, J.G., Paetkau, D., Lewis, D., McLellan, B.N., Proctor, M., Strobeck, C., 1999: Genetic Tagging of Free-Ranging Black and Brown Bears. Wildlife Soc B 27(3): 616–627.
Yang, Q., Su, Y., Jin, S., Kelly, M., Hu, T., Ma, Q., Li, Y., Song, S., Zhang, J., Xu, G., Wei, J., 2019: The influence of vegetation characteristics on individual tree segmentation methods with airborne LiDAR data. Remote Sens–Basel 11(23): 2880. https://doi.org/10.3390/rs11232880
Zhen, Z., Quackenbush, L.J., Zhang, L., 2016a: Trends in automatic individual tree crown detection and delineation-evolution of LiDAR data. Remote Sens-Basel 8(4): 333. https://doi.org/10.3390/rs8040333
Zhen, Z., Zhao, Y., Hao, Y., Wei, Q., 2016b: Development of accuracy assessment tool of individual tree crown delineation. In: International Geoscience and Remote Sensing Symposium (IGARSS), Nov. Institute of Electrical and Electronics Engineers Inc., 3186–3189.
Ziesak, M., Marques, A.F., Rasinmaki, J., Rosset, C., Nummila, K., Scholz, J., Mittlboeck, M., de Sousa, J.P., Häkli, J., Rommel, D., 2014: Advances in forestry control and automation systems in Europe – FOCUS: the concept idea in a multinational EU research project. Proceedings of the 6th Precision Forestry Symposium: The anchor of your value chain. P., Ackerman, E., Gleasure and H., Ham. Stellenbosch, South Africa, Faculty of AgriSciences, Stellenbosch University, 114 p.
© 2022 by the authors. Submitted for possible open access publication under the
terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Authors’ addresses:
Assist. prof. Kristijan Tomljanović, PhD
e-mail: kristijan.tomljanovic@sumfak.unizg.hr
Antonija Kolar mag. ing. silv. *
e-mail: akolar@sumfak.hr
Assist. prof. Milivoj Franjević, PhD
e-mail: milivoj.franjevic@sumfak.unizg.hr
Department of Forest Protection and Wildlife Management
Assist. prof. Andreja Đuka, PhD
e-mail: andreja.duka@sumfak.unizg.hr
Department of Forest Engineering
Assoc. prof. Damir Ugarković, PhD
e-mail: damir.ugarkovic@sumfak.unizg.hr
Department of Ecology and Silviculture
Faculty of Forestry and Wood Technology University of Zagreb
Svetošimunska 23
10000 Zagreb
CROATIA
Luka Jurjević, PhD
e-mail: luka.jurjevic@geounit.hr
Geo Unit d.o.o.
Stanka Vraza 8
23000 Zadar
CROATIA
Iva Matak, MSc
e.mail: Matakiva123@gmail.com
Lavoslava Ružičke 3
43000 Bjelovar
CROATIA
Ivan Balenović, PhD
e-mail: ivanb@sumins.hr
Division for Forest Management and Forestry Economics
Croatian Forest Research Institute
Trnjanska cesta 35
10000 Zagreb
CROATIA
* Corresponding author
Received: 18 June 2021
Accepted: 28 October 2021
Subject review