Assessing Forest Traversability for Autonomous Mobile Systems Using Close-Range Airborne Laser Scanning
doi: 10.5552/crojfe.2024.2229
volume: 45, issue:
pp: 13
- Author(s):
-
- Yrttimaa Tuomas
- Matsuzaki Shigemichi
- Kankare Ville
- Junttila Samuli
- Saarinen Ninni
- Kukko Antero
- Hyyppä Juha
- Miura Jun
- Vastaranta Mikko
- Article category:
- Original scientific paper
- Keywords:
- autonomous forestry, digital forestry, terrestrial laser scanning, high-density point cloud, path planning, traversability mapping, robot navigation, forest robotics
Abstract
HTML
Advances in sensor technology and computing performance has brought us into an era of digital forestry where a forest environment can be digitally replicated. At the same time, an increasing interest in the use of unmanned vehicles and other autonomous mobile systems (AMSs) in forest mapping and operations has emerged. However, a forest is an unstructured and rather complex environment for AMSs to operate in, and usually some kind of a priori information of traversability is required. The aim of this study was to assess forest traversability for AMSs using high-density airborne laser scanning (ALS) point clouds. It was assumed that such point clouds acquired from a helicopter flying at a low altitude can be used to characterise vegetation obstacles affecting forest traversability. A voxel-based vegetation occupancy analysis was carried out with the aim to detect open space to define traversable three-dimensional space. The experimental setup included seven sample plots (32×32 m) representing diverse boreal forest structures. Terrestrial laser scanning (TLS) was used for obtaining reference for vegetation occupancy. Comparison between ALS and TLS revealed an overall accuracy of 0.85–0.94 with a recall of 0.78–0.91 and a precision of 0.62–0.74 for ALS-based voxel classification for vegetation occupancy depending on forest structure. This implies that up to 91% of voxels assigned a classification »occupied« based on the TLS could be correctly classified using the ALS, while up to 74% of voxels assigned a classification »occupied« using the ALS were occupied based on the TLS. Density of low vegetation accounted for 83% of the variation in accuracy and precision. The feasibility of vegetation occupancy information to be used by an AMS for navigation was also demonstrated. It was assumed that the ALS data convey as sufficient information of AMS path planning as does the TLS data. The experiments showed that out of 1393 randomly generated paths based on empty space detected by the ALS, 72% were considered feasible when validated with the TLS data. The success rate in path planning varied from 0.54 to 0.92 between the sample plots and was seemingly affected by vegetation density that accounted for 53% of variation in success rate. Altogether, the demonstrated possibility to predefine forest traversability using remote sensing will support the use of AMSs in forestry.
Assessing Forest Traversability for Autonomous Mobile Systems Using Close-Range Airborne Laser Scanning
Tuomas Yrttimaa, Shigemichi Matsuzaki, Ville Kankare, Samuli Junttila, Ninni Saarinen, Antero Kukko, Juha Hyyppä, Jun Miura, Mikko Vastaranta
Abstract
Advances in sensor technology and computing performance has brought us into an era of digital forestry where a forest environment can be digitally replicated. At the same time, an increasing interest in the use of unmanned vehicles and other autonomous mobile systems (AMSs) in forest mapping and operations has emerged. However, a forest is an unstructured and rather complex environment for AMSs to operate in, and usually some kind of a priori information of traversability is required. The aim of this study was to assess forest traversability for AMSs using high-density airborne laser scanning (ALS) point clouds. It was assumed that such point clouds acquired from a helicopter flying at a low altitude can be used to characterise vegetation obstacles affecting forest traversability. A voxel-based vegetation occupancy analysis was carried out with the aim to detect open space to define traversable three-dimensional space. The experimental setup included seven sample plots (32×32 m) representing diverse boreal forest structures. Terrestrial laser scanning (TLS) was used for obtaining reference for vegetation occupancy. Comparison between ALS and TLS revealed an overall accuracy of 0.85–0.94 with a recall of 0.78–0.91 and a precision of 0.62–0.74 for ALS-based voxel classification for vegetation occupancy depending on forest structure. This implies that up to 91% of voxels assigned a classification »occupied« based on the TLS could be correctly classified using the ALS, while up to 74% of voxels assigned a classification »occupied« using the ALS were occupied based on the TLS. Density of low vegetation accounted for 83% of the variation in accuracy and precision. The feasibility of vegetation occupancy information to be used by an AMS for navigation was also demonstrated. It was assumed that the ALS data convey as sufficient information of AMS path planning as does the TLS data. The experiments showed that out of 1393 randomly generated paths based on empty space detected by the ALS, 72% were considered feasible when validated with the TLS data. The success rate in path planning varied from 0.54 to 0.92 between the sample plots and was seemingly affected by vegetation density that accounted for 53% of variation in success rate. Altogether, the demonstrated possibility to predefine forest traversability using remote sensing will support the use of AMSs in forestry.
Keywords: autonomous forestry, digital forestry, terrestrial laser scanning, high-density point cloud, path planning, traversability mapping, robot navigation, forest robotics
1. Introduction
The importance of forests to the biosphere is undisputed. Forests harbour habitat for most terrestrial species (FAO and UNEP 2020) while maintaining biodiversity (Aerts and Honnay 2011, Barrett et al. 2018) as well as carbon balance (Pan et al. 2011). Besides their productive and ecological functions, forests are also associated with social and cultural aspects that have influenced the development of societies (Ritter and Dauksta 2013). This human-forest relationship explains the general interest in forests regardless of the context. Sustainable forest resource management and co-existence with nature in general requires knowledge of forest ecosystem functioning (Toman and Ashton 1996). From a forestry perspective, advances in sensor technology and computing performance have brought us into an era of digital forestry where a forest environment can digitally be replicated for gaining enhanced information of forest characteristics and their development (Zhao et al. 2005, Morsdorf et al. 2018, Liang et al. 2022). At the same time, following the technology-driven development goals within our society such as increased level of automatisation and use of robots, an interest in the use of autonomous mobile systems (AMSs) such as unmanned aerial vehicles (UAVs) in forest mapping and operations has emerged (Oliveira et al. 2021). However, a forest is an unstructured and complex environment for an AMS to operate in, and usually some kind of a priori information of traversability is required (Ahtiainen et al. 2016). Vegetative structures together with terrain characteristics thus determine how traversable a forest environment is for these mobile systems.
In robotics, traversability generally refers to terrain characteristics, such as the surface type, texture, slope, and roughness, allowing a robot to safely move around to achieve the set goal (Papadakis 2013). A traversability map is usually generated and used for navigation to avoid obstacles (Cook and Zhang 2020). However, as traversability describes terrain characteristics from the mobile system point of view, the off-road capability and kinematic constraints of AMSs affect how traversability is eventually assessed (Papadakis 2013). This means that terrain-related traversability depends on the size and locomotion capabilities of the mobile system (Molino et al. 2007). Considering ground robots or unmanned terrain vehicles capable of supporting forest mapping and operations, certain off-road capabilities are presumed (Oliveira et al. 2021). In forest environments, small-scale terrain unevenness or low vegetation on the field layer should not have a major resisting effect on locomotion. Instead, standing trees, bushes and other undergrowth vegetation accompanied with fallen trees, cliffs, ditches and stones, etc. are considered as non-traversable obstacles that should be avoided when navigating inside a forest.
Obstacle mapping prior or during locomotion is required for successful navigation in an unknown environment (Cook and Zhang 2020). On-board sensors providing 3D information of the environmental characteristics are generally preferred in traversability analysis (e.g., Zhu et al. 2013, Bogoslavskyi et al. 2013, Suger et al. 2015, Sock et al. 2016, Mongus and Juric 2019, Gomez et al. 2020, Matrinez et al. 2020, Zhou et al. 2021). In prior studies, however, traversability analysis or obstacle mapping for robot navigation has usually meant traversable terrain mapping, while experiments in a forest environment have gained less attention. The study by Huertas et al. (2005) was among the first attempts to assess vegetation-induced traversability in a forest environment using stereo imagery for detecting non-traversable tree trunks. Recently, Matsuzaki et al. (2018, 2022) took a step towards vegetation-induced traversability mapping when analysing traversable regions for a greenhouse robot by considering vegetative structures as obstacles.
Regarding forest characterisation, close-range sensing techniques such as laser scanning and photogrammetry have been adopted as feasible observation tools (Morsdorf et al. 2018, Liang et al. 2018, Calders et al. 2020, Liang et al. 2022). Based on light detection and ranging (LiDAR) or multi-view stereo imagery and dense image matching, the three-dimensional (3D) structure of the objects of interest can be captured and stored as a digital format of point clouds enabling virtual revisits to forests for non-destructive characterisation of trees (Yrttimaa 2021). Terrestrial laser scanning (TLS) represents the state-of-the-art geometric accuracy in point cloud generation, enabling millimetre-level accuracy in tree 3D modelling (Raumonen et al. 2013, Hackenberg et al. 2014) and spatiotemporal monitoring of tree structure (Luoma et al. 2021, Yrttimaa et al. 2022, 2023). TLS provides a hemispherical point cloud that is acquired from a static platform, usually a tripod. Most often the so-called multi-scan approach is applied, that is, several individual point clouds from separate scan locations equally distributed around the sample plot or forest stand are co-registered together (Wilkes et al. 2017). Cost-efficiency in terrestrial point cloud data acquisition can be improved by attaching the laser scanner to a mobile platform such as a car or an all-terrain vehicle (Holopainen et al. 2013, Liang et al. 2014, Tang et al. 2015, Liang et al. 2018). Mobile laser scanning (MLS) accompanied with simultaneous localisation and mapping (SLAM)-techniques (Kukko et al. 2017) enables 3D recording of the environment on-the-move, but – at least currently – with the cost of reduced geometric accuracy when compared to the TLS (Balenović et al. 2021). Unmanned aerial vehicles (UAVs) can also be used as carrier platforms for a laser scanner (Jaakkola et al. 2010, 2017, Wallace et al. 2012) or a digital camera (Westoby et al. 2012, Puliti et al. 2015), providing a point cloud acquisition geometry different to TLS which generally benefits the characterisation of the upper parts of the forest canopy (Yrttimaa et al. 2020). UAV-borne laser scanning (ULS), or airborne laser scanning (ALS) in general, broadens the applicability of point cloud-based forest characterisation to cover entire forest stands and landscapes (Morsdorf et al. 2018). UAVs can be considered as feasible AMSs for forest inventory and monitoring operations (Oliveira et al. 2021), providing flexible capacity for close-range sensing data acquisition from above or within the forest canopy (see e.g., Hyyppä et al. 2020a).
The aim of this study is to assess forest traversability for AMSs using high-density ALS point clouds. It is assumed that ALS point clouds acquired from a helicopter flying at a low altitude can be used to characterise vegetation obstacles affecting traversability of forest robots. Voxel-based vegetation occupancy analysis is carried out aiming at open-space detection to define traversable/non-traversable three-dimensional (3D) space within a forest. For validation, TLS point clouds are used as reference for vegetation occupancy to investigate how the obtained information of vegetation-induced traversability differs when derived using ALS or TLS. It is also assumed that ALS-based information of vegetation-induced traversability will be useful for generating maps of traversable pathways for AMSs to navigate inside the forest. To validate this hypothesis, ALS-derived information of traversable 3D space is used to generate theoretical pathways for AMSs flying inside the forest. TLS-derived vegetation occupancy voxel maps are used for evaluating the feasibility of the generated flight paths. It is expected that such high-density ALS data that is available for experimental use today will be more widely available in the future. Thus, the possibility to generate forest traversability maps using ALS point clouds will enhance the applicability of AMSs in forestry.,
2. Materials and Methods
2.1 Experimental Design
The experimental design of this study consists of seven sample plots (32×32 m) located in Evo in southern Finland (61°11' N, 25°8' E). A diverse variation of southern boreal forest structures, including managed and natural, single- and mixed-species, as well as single- and multi-layered forest stands, with Scots pine (Pinus sylvestris L.), Norway spruce (Picea abies (L.) H. Karst.), birches (Betula sp.) and aspen (Populus tremula L.) being the dominant tree species. Vegetation density varies between the sample plots. For example, the number of trees per hectare ranges from 430 to 1816, while the mean basal area ranges from 23.1 m2/ha to 42.5 m2/ha, as per field inventory campaign carried out in autumn of 2021 (see Table 1). Typical to the forests within the vicinity, all the sample plots feature a rather flat terrain with varying degree of low vegetation and fallen dead trees on the forest floor.
Table 1 Forest structural characteristics of each sample plot based on field inventory carried out in autumn 2021. G = mean basal area, Dg = basal area-weighted mean diameter at breast height, Hg = basal area-weighted mean tree height, V = mean volume, TPH = number of trees per hectare
|
Sample plot id |
G, m2/ha |
Dg, cm |
Hg, m |
V, m3/ha |
TPH, n/ha |
|
#1 |
23.8 |
28.2 |
22.8 |
251.8 |
430 |
|
#2 |
38.6 |
29.0 |
25.9 |
469.3 |
820 |
|
#3 |
23.1 |
18.8 |
19.9 |
215.2 |
947 |
|
#4 |
29.6 |
19.2 |
18.8 |
269.1 |
1807 |
|
#5 |
41.2 |
41.9 |
23.8 |
388.3 |
977 |
|
#6 |
42.5 |
36.6 |
25.6 |
454.5 |
1816 |
|
#7 |
38.9 |
37.8 |
28.3 |
492.3 |
469 |
|
G – mean basal area, Dg – basal area-weighted mean diameter at breast height, Hg – basal area-weighted mean tree height, V – mean volume, TPH – number of trees per hectare |
|||||
2.2 Point Cloud Data
TLS point clouds used for obtaining reference data for ALS-based traversability analysis were acquired from the sample plots during April–May 2021. A Leica RTC360 3D time-of-flight laser scanner (Leica Geosystems, Switzerland), operating at 1550 nm wavelength with beam divergence of 0.16 mrad and 360° horizontal and 310° vertical field-of-view, was used for obtaining the point clouds. The scan setup included one centre scan augmented with eight auxiliary scans located evenly around the plot centre, preferring locations near the sample plot borders (for reference, see e.g., Yrttimaa et al. 2023). All the scans from each of the sample plots were co-registered together using artificial reference targets attached to trees, approximately five to six per each sample plot. A Register360 software, provided by the scanner manufacturer, was used for the co-registration procedure.
ALS point clouds were acquired from the sample plots on 22 June 2021 using a multispectral ALS system consisting of three separate Riegl (RIEGL Laser Measurement Systems GmbH, Austria) laser scanners (VUX-1HA, MiniVUX-3UAV, and VQ-840-G) operating at the wavelengths of 1550 nm, 905 nm and 532 nm and with a beam divergence of 0.5×0.5 mrad, 0.5×1.6 mrad, and 1.0×1.0 mrad, respectively. The laser scanners were carried by a helicopter flying at approximately 80 m above the ground at the speed of 14 m/s. As the aim was to obtain detailed airborne point clouds, we used the combination of point clouds obtained using all the three sensors onboard. The scanning flights were also planned so that the flight paths crossed each sample plot from four directions: north to south, west to east, south to north, and east to west. The point cloud data was processed in RiProcess software by Riegl and coupled with trajectory and orientation information. Altogether, this ALS campaign resulted in a mean point density of approximately 3200 pts/m2.
2.3 Point Cloud Processing Methods
Due to differences in the applied coordinate reference systems, the ALS and TLS point clouds were co-registered. A multi-step registration process was employed for this task using points approximately at the height range between 0 [m] and 4 [m] above the ground, where the ALS and TLS point clouds proved to be the most similar in terms of their capacity of characterising the forest structure based on preliminary investigations. The point clouds were first roughly registered by RANSAC-based global registration with feature points represented as Fast Point Feature Histograms (FPFH) (Rusu et al. 2009). After that, the pose was further refined using the Generalised Iterative Closest Point (GICP) algorithm (Segal et al. 2009) with Tukey robust kernel (Beaton and Tukey 1974). For the entire co-registration process, Open3D (Zhou et al. 2018) was used, a Python library for point cloud processing.
Forest traversability was then assessed by determining empty space within the sample plots. For this task, a regular grid of 0.1 m voxels was generated; they were further labelled as »occupied« or »empty« based on the presence of points (one or more) within each voxel (Fig. 1), hereafter referred to as vegetation occupancy maps. For the voxel mapping, OctoMap (Hornung et al. 2013) was employed, which represents the space in efficient OcTree structure and manages the occupancy of each voxel probabilistically. The vegetation occupancy maps were generated for each sample plot using the ALS and TLS point clouds separately.
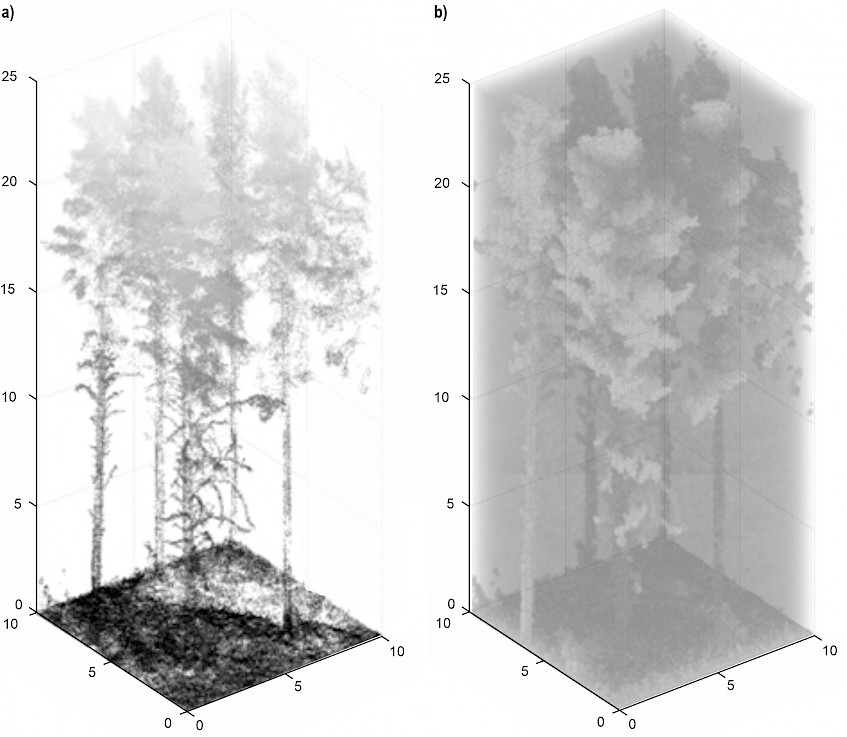
Fig. 1 Airborne laser scanning point clouds (a) converted to vegetation occupancy voxel maps with a voxel size of 0.1 m, (b) voxels labelled as »occupied« and »empty« are coloured by light grey and green, respectively. The same workflow was repeated for terrestrial laser scanning point clouds to obtain reference for vegetation occupancy
Feasibility of ALS-derived vegetation occupancy information for assessing forest traversability was explored by generating theoretically traversable flight paths for AMSs (e.g., UAVs). No technical constraints related to navigation capacity or safety distance of an AMS, for example, were considered as the focus was rather on analysing the capacity of the ALS to deliver sufficient vegetation occupancy information that could be used by an AMS of any type for navigation. For each sample plot, 199 paths were generated between randomly picked start and goal points in the ALS-derived vegetation occupancy voxel map. For each iteration, the start and goal points were randomly selected from among points that represented the centres of voxels labelled as »empty« based on occupancy analysis. Euclidean distance in 3D space between the start and goal points was allowed to range from a minimum of 10 m to a maximum of 40 m. Traversable flight paths between the start and goal points were then determined using the Rapidly-exploring random trees (RRT) algorithm and specifically its optimised version RRT* (Karaman and Frazzoli 2011) which, compared to the RRT, aims to achieve the shortest path between start and goal. The RRT* algorithm was employed to find a sequence of line segments connecting the start and goal points without passing voxels occupied by vegetation.
The source code for the analysis was implemented in Python and is available on GitHub (Matsuzaki 2022).
2.4 Evaluation of Capacity of ALS to Assess Forest Traversability
Capacity of ALS to assess forest traversability for AMSs was evaluated by considering the accuracy of ALS-based vegetation occupancy mapping and the feasibility of theoretical AMS flight paths generated accordingly. Accuracy of vegetation occupancy mapping was evaluated by comparing ALS-based 3D vegetation occupancy maps to TLS counterparts. A voxel-by-voxel comparison was carried out on each sample plot while using accuracy, precision, and recall as performance measures:
 (1)
(1)
 (2)
(2)
 (3)
(3)
Where:
TP denotes true positives (i.e., the number of voxels correctly labelled as »occupied«)
TN denotes true negatives (i.e., the number of voxels correctly labelled as »empty«)
FP denotes false positives (i.e., the number of empty voxels falsely labelled as »occupied«)
FN denotes false negatives (i.e., the number of occupied voxels falsely labelled as »empty«), considering TLS data as a reference and ALS data for predictions.
Accuracy measures the proportion of voxels with true prediction. Precision measures the proportion of voxels assigned an ALS-prediction »occupied« that were occupied based on TLS (i.e., user's accuracy). Recall measures the proportion of occupied voxels that were correctly labelled as »occupied« based on the ALS (i.e., producer's accuracy).
The feasibility of each generated flight path was validated using TLS-derived vegetation occupancy voxel map. The feasibility of a flight path was confirmed if the path did not pass occupied voxels; it was rejected if the path intersected occupied voxels. Success rate was finally computed for each sample plot as the proportion of feasible paths from among all the 199 iterations.
It was assumed that the vegetation density, specifically the occupancy of low vegetation causing multi-layered forest structure, may influence the capacity of ALS in assessing forest traversability. Thus, we examined the relationship between the accuracy metrics and a TLS-based metric characterising vegetation occupancy (VO). For this task, the TLS point clouds were voxelised into a 0.5 m grid and the VO was obtained as a ratio between the combined volume of occupied voxels to the combined volume of both occupied and empty voxels. The VO was computed separately for point clouds accounting for 0–50% (VO50%) and 0–25% (VO25%) of the range in Z-coordinates to quantify the occupancy of low vegetation that is characteristic for a multi-layered forest structure. Pearson's coefficient of correlation (r) was used as a measure of the strength of the relationship between the accuracy metrics and VO. Coefficient of determination (R2) was used to assess the proportion of variation in the accuracy metrics that VO accounts for.
3. Results
3.1 Capacity of High-Density ALS to Determine Vegetation Occupancy
Visual comparison with the TLS point clouds showed that the ALS could characterise the vegetative structures of the sample plots representing different forest structures (Fig. 2). On a single-layered sample plot (sample plot #1 as an example), the ALS point cloud seemed to characterise the forest structure as well as the TLS, providing sufficient 3D reconstruction of both terrain as well as high and low vegetation. A multi-layered sample plot (sample plot #5 as an example) featured a slightly limited capacity for the ALS to reconstruct detailed characteristics of terrain and low vegetation, while the characterisation of high vegetation, specifically the crowns of dominant trees, seemed to be improved when compared to the TLS.
Voxel-by-voxel comparison between the vegetation occupancy voxel maps revealed strong agreement between the ALS and TLS (Table 2). Overall accuracy of 0.89 (0.85–0.94), with a recall of 0.84 (0.78–0.88) and a precision of 0.69 (0.62–0.74), was recorded for the ALS-based vegetation occupancy mapping. These figures imply that, on average, 89% of voxels in the ALS-based vegetation occupancy maps were correctly labelled as »occupied« or»empty«. 84% of occupied voxels were correctly labelled as »occupied« using the ALS, and 69% of voxels labelled as »occupied« using the ALS were occupied by the vegetation. Vegetation density seemed to affect the accuracy of the ALS-based vegetation occupancy mapping as VO25%, accounting for 82.9% of the variation in accuracy (r = –0.911, p < 0.01; see Fig. 3a) and 82.4% in precision (r = –0.908, p < 0.01), while no statistically significant relationship was recorded between VO and recall.
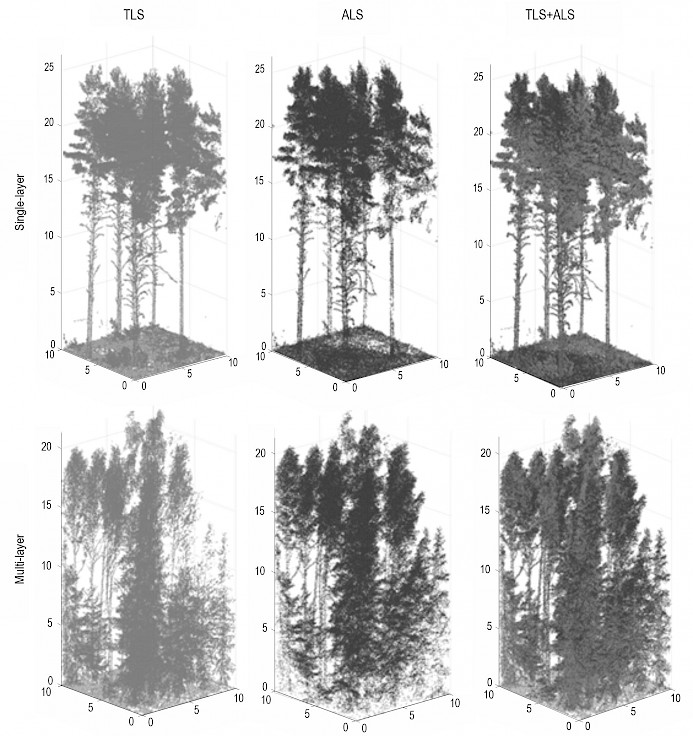
Fig. 2 Illustration of 10x10 m subsamples of sample plots representing a single- (sample plot #1 as an example) and a multi-layer (sample plot #5 as an example) forest structure, characterised by point clouds derived from terrestrial laser scanning (TLS) and airborne laser scanning (ALS) as well as their combination (TLS+ALS)
Table 2 Accuracy, precision and recall measuring the capacity of high-density airborne laser scanning (ALS) point clouds to determine vegetation occupancy when performing a voxel-to-voxel comparison to reference vegetation occupancy voxel map based on terrestrial laser scanning (TLS). Success rate denotes the proportion of flight paths, randomly generated for each sample plot based on the ALS-derived vegetation occupancy information, that were confirmed feasible with the TLS data
|
Sample plot id |
Accuracy |
Precision |
Recall |
Success Rate |
|
#1 |
0.94 |
0.74 |
0.88 |
0.92 |
|
#2 |
0.91 |
0.70 |
0.78 |
0.54 |
|
#3 |
0.89 |
0.73 |
0.91 |
0.80 |
|
#4 |
0.86 |
0.67 |
0.87 |
0.69 |
|
#5 |
0.86 |
0.66 |
0.81 |
0.72 |
|
#6 |
0.85 |
0.62 |
0.81 |
0.76 |
|
#7 |
0.91 |
0.71 |
0.80 |
0.62 |
|
Overall mean |
0.89 |
0.69 |
0.84 |
0.72 |
3.2 Feasibility of Vegetation Occupancy Information for AMS Flight Path Planning
Out of 1393 randomly generated flight paths employing ALS-based information of empty space within the forest structure, 1005 flight paths (72.1%) were considered feasible when validated using the TLS data (Table 2). The success rate in path planning varied from 0.54 to 0.92 between the sample plots and was affected by vegetation density (VO50%) and recall that both accounted for 52.9% (r = –0.726, r = 0.727, respectively) of the variation in the success rate (Fig. 3b), although the statistical significance of the relationships remained open for interpretation with p = 0.064.
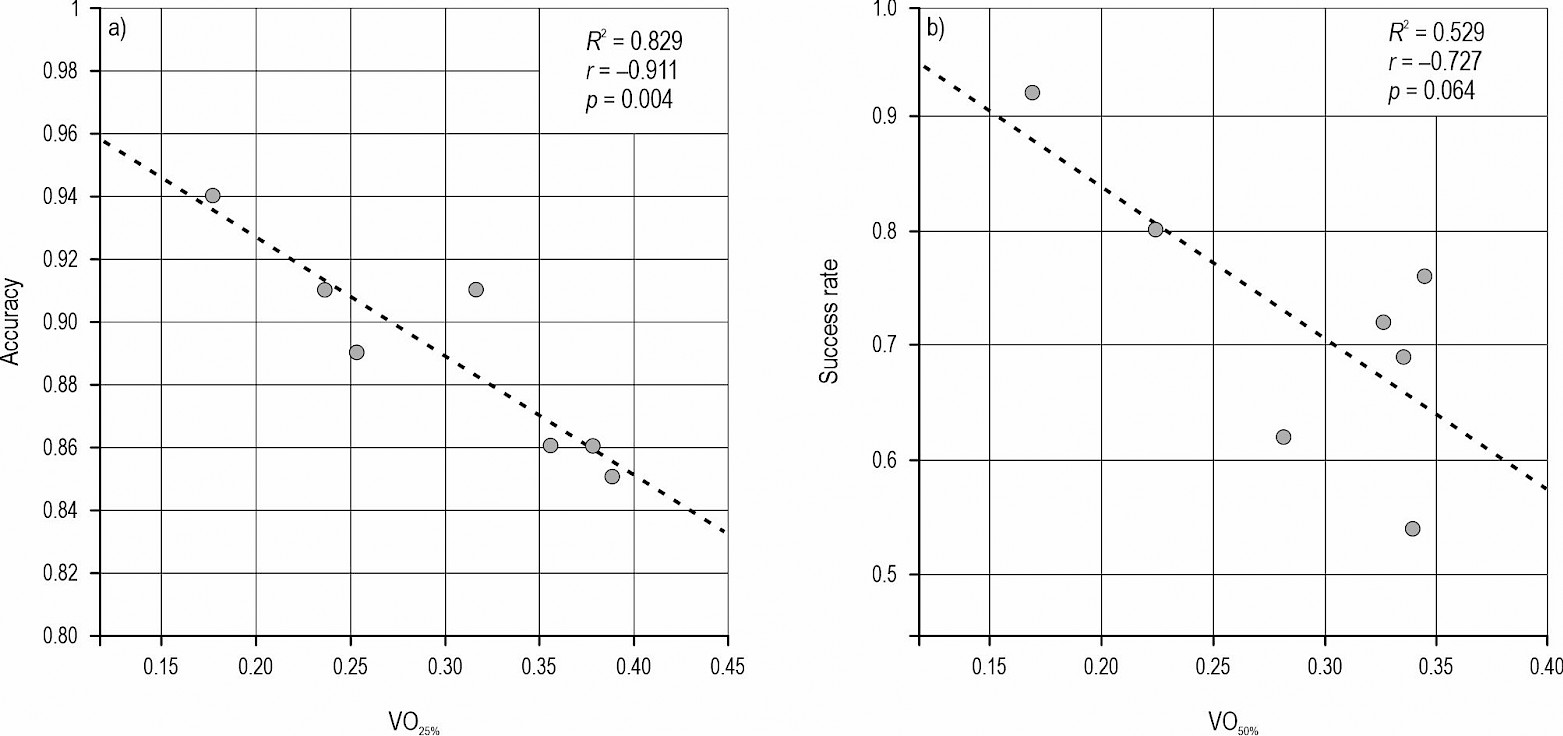
Fig. 3 Accuracy in airborne laser scanning (ALS)-based vegetation occupancy mapping (a) and success rate in ALS-based flight path planning (b) and their relation to metrics characterising density of low vegetation; vegetation occupancy at 0–25% (VO25%) and 0–50% (VO50%) of the range in Z-coordinate. Coefficient of determination (R2), coefficient of correlation (r) and related p-value denote the strength and statistical significance of the relationships
4. Discussion
This study aimed at improving the understanding of the feasibility of ALS in assessing forest vegetation-induced traversability for AMSs. It was assumed that the ALS point clouds acquired from a helicopter flying at approximately 80 m above the ground can be used to characterise vegetation obstacles affecting traversability. When using the TLS point clouds as a reference, the experiments showed an overall classification accuracy of 0.89 in ALS-based vegetation occupancy mapping, confirming the validity of the hypothesis. To demonstrate the feasibility of ALS in providing information of forest traversability, the ALS-based vegetation occupancy maps were applied to generate theoretical flight paths for an AMS to navigate inside the forests. The flight paths were validated on the TLS-derived vegetation occupancy maps, showing that 54% to 92% of the randomly generated flight paths were considered feasible, depending on vegetation characteristics. This validated the related hypothesis stating that ALS conveys as sufficient information of AMS path planning as TLS data. As expected, the capacity of ALS to assess forest traversability was affected by vegetation density, which accounted for 83% of the variation in the accuracy of the vegetation occupancy mapping and 53% of the variation in the success rate of the flight path planning. Altogether, the findings obtained in this study highlight the feasibility of high-density ALS point clouds in forest characterisation in general and vegetation occupancy mapping in particular, which is useful in assessing forest traversability.
Although vegetation density was found to explain most of the variation in the capacity of ALS to assess vegetation-induced traversability between the sample plots, there were some potential causes of error that could account for the unexplained part of the variation. Presumably, one of such causes is related to differences in the point cloud acquisition geometries between ALS and TLS. While TLS provides a hemispherical point cloud from inside the forest, ALS characterises the forest structure from above the canopy. This leads to different capacities of the two methods in characterising low and high vegetation (Fig. 2). In a multi-layered forest, some parts of the low vegetation characterised by the TLS were not captured by the ALS, resulting in false negative predictions. Correspondingly, some parts of the high vegetation were only characterised by the ALS and not by the TLS, resulting in false positive predictions in the vegetation occupancy mapping. An overall precision of 69% in the vegetation occupancy mapping denotes that 31% of the voxels labelled as »occupied« based on the ALS were empty based on the TLS. According to the experiments, vegetation density (VO25%) accounted for 82.4% of inter-plot variation in precision with respective r value of –0.91 suggesting that precision decreased (i.e., the number of false positives increased) with increasing density of low vegetation. This is most probably due to the enhanced capacity of ALS to characterise the upper canopy layer, specifically when the vegetation density increases (Wang et al. 2019), compared to TLS. These findings are supported by the literature, as TLS generally has a rather limited capacity in vertical forest characterisation of dense forest stands with the upper parts of dominant trees often remaining occluded by adjacent vegetation (Wilkes et al. 2017, Liang et al. 2018, Yrttimaa et al. 2020). Meanwhile, ALS has featured a limited capacity in characterising horizontal multi-layered forest structures (Puliti et al. 2015). Application of the state-of-the-art sensor technology accompanied with off-nadir field-of-view, as in this study, facilitates the reconstruction of low vegetation and even characterisation of stem properties (Hyyppä et al. 2020b). However, the geometric accuracy of TLS is still not reached (Liang et al. 2022), although for vegetation occupancy mapping, ALS conveys sufficient geometric accuracy considering the voxel-based approach and a 0.1-m resolution used in this study.
An overall recall of 84% in the vegetation occupancy mapping denotes that 16% of the voxels occupied by vegetation were labelled as »empty« based on the ALS. This could be due to the fact that, in densely vegetated forest stands, ALS could not characterise low vegetation well as TLS, although this interpretation was not fully wisupported by the statistics (p = 0.06). Another possible reason is, however, the spatial misalignment of the ALS and TLS point clouds caused by natural movement of trees and co-registration errors. There was a time lag of approximately 1–1.5 months in between the TLS and ALS campaigns, and it can be seen from Fig. 2. that the ALS and TLS point clouds featured some minor differences in the orientation of branches and treetops. The TLS data was acquired early in the spring featuring leaf-off conditions, while the ALS data featured leaf-on conditions, which may increase the number of voxels occupied by the leaves of deciduous trees as well as the grasses and hays among the undergrowth vegetation. Spatial misalignment-induced errors in the vegetation occupancy mapping may also be traced to the co-registration process of the ALS and TLS point clouds. Considering the co-registration accuracy between the ALS and TLS point clouds, Dai et al. (2019) reported a 3D distance residual error of 6.7 cm when validated in the same study site and applying a standard ICP method in obtaining the final coordinate transformation between the ALS and TLS. At best, a similar level of accuracy is expected to be reached in this study, although a slightly different co-registration method was used here. However, the co-registration accuracy was not assessed for our experiments and thus it could also be possible that the desired level of the co-registration accuracy was not reached in all of the sample plots. Considering the applied voxel size of 0.1 m, co-registration errors greater than that may cause displacement of the voxels and further cause systematic errors when comparing the vegetation occupancy maps voxel-by-voxel. This highlights the importance of ensuring the spatial alignment of point clouds through a careful co-registration process when employing point clouds derived from different sensors and platforms. Increasing the applied resolution in vegetation occupancy maps could mitigate errors related to spatial misalignment of point clouds, while also being reasonable to expect AMS that could feature considerably larger dimensions. However, as the aim of this study was to investigate differences in the vegetation occupancy maps derived using the ALS and TLS, the use of a 0.1 m resolution is expected to be justified.
For forest traversability assessment, the feasibility of vegetation occupancy information is essential. This was explored in this study by randomly generating 199 theoretical flight paths per each sample plot for an AMS capable of flying inside the forest. The generated paths were validated based on the occupancy information obtained with TLS. This was a completely theoretical experiment, and no actual AMS was used in the validation of the flight paths, nor any technical restrictions related to operability or navigation of an AMS were considered. Rather, the aim of this experiment was to illustrate the differences between the ALS- and TLS-based vegetation occupancy maps and gain knowledge of what those differences mean for the forest traversability assessment. While the comparison of the vegetation occupancy maps illustrates how well the entire sample plot was characterised by the ALS compared to the TLS, each generated flight path represented a traversable pathway between the randomly sampled start and goal points. This enabled a probabilistic approach in the validation of the capacity of the ALS in assessing forest traversability. The flight paths were validated using the TLS-derived vegetation occupancy maps by examining whether the flight paths intersected with voxels occupied by vegetation. The results showed an overall success rate of 0.72 when all the sample plots were considered, reaching up to 0.92 in a single-layered sample plot #1 (Table 2). It should be noted that the feasibility of a flight path was straight away rejected if at least one occupied voxel was intersecting, which was the case for most of the rejected paths. Possible spatial misalignment between the ALS and TLS data made it probable that some of the paths intersected with the occupied voxels in the TLS data. The RRT* algorithm that was used in path planning aimed at finding the shortest traversable path, not ensuring any safety buffer around it. When using vegetation occupancy maps for actually generating paths for a forest robot navigation, some kind of a safety buffer of empty space around the path is most likely considered, depending on the dimensions and manoeuvrability of the applied AMS. Altogether, the results related to the flight path validation showed that, even though not all the generated paths were always feasible, traversable paths could still be determined regardless of the forest structure, which highlights the feasibility of high-density ALS in assessing forest traversability. Practically speaking, when an AMS moves among vegetation, it will continuously detect surrounding obstacles and plan a path online (local path planning). Therefore, a small blockage on a pre-planned path is not considered an issue if the system can replan a feasible path using information acquired with on-board sensors. Ideally, semantic classification of the vegetative structures could be beneficial information for AMS navigation as in a forest environment occasional collision with flexible structures such as branches and leaves would not necessarily prevent an AMS from moving.
The ALS point cloud data used in this study was obtained from a helicopter carrying an ALS system consisting of three separate laser scanners to obtain a dense ALS point cloud (~3200 pts/m2). It should be noted that the used ALS data does not represent a typical airborne point cloud that can be acquired using a regular UAV laser scanning (ULS) or current ALS setups, but something that may become available in the upcoming years. Characterising forest vegetation-induced traversability with a 0.1-m voxel resolution does not necessarily require millimetre or even centimetre-level point spacing in a point cloud. That said, it is expected that the findings of this study generally apply to any ULS or dense ALS point cloud. The experimental design of this study included seven sample plots representing a range of different southern boreal forest structures (see Table 1) that revealed how the examined phenomenon was dependent on the forest structure, specifically on the density of low vegetation. This implies that, besides being applicable within southern boreal forest conditions, it is expected that the findings of this study could be at least partly applied beyond boreal forests if the structural characteristics of the forest stands resemble those of this study.
To put this into context, an application of robotics in any environment requires obstacle mapping for successful navigation of autonomous mobile systems (Cook and Zhang 2020), and a forest environment is no exception (Ahtiainen et al. 2016). As certain off-road capabilities are required for the locomotion system (Oliveira et al. 2021), vegetation obstacles are considered as the main component of forest traversability with terrain characteristics being less determinant. Thus, assessment of forest traversability requires methods for characterising vegetation occupancy. Close-range ALS is a feasible technology for acquiring point clouds for forest characterisation (Morsdorf et al. 2018) and traversability assessment as well (Zhu et al. 2013, Bogoslavskyi et al. 2013, Sugar et al. 2015, Zhou et al. 2021). While previous studies employing point clouds for traversability assessment have mainly focused on analysing terrain characteristics using on-board sensors, this study contributes by investigating the feasibility of ALS in providing pre-information of vegetation-induced traversability. This information could be further used when deciding upon whether a forest environment is traversable for forest robots or not. Using the state-of-the-art laser scanning technology for acquiring detailed ALS point clouds, it was demonstrated that the capacity of ALS in vegetation occupancy mapping reaches a level of detail and geometric accuracy that is sufficient for determining traversable pathways for AMSs. This highlights the capacity of high-density ALS in forest characterisation for this specific purpose and confirms its feasibility in providing forest traversability information to promote the emergence of AMSs in forestry. Besides traversability assessment, ALS-derived vegetation occupancy maps could be possibly applied in operative planning of forest harvesting routes, for example, to identify forest structures such as brushwood that are valuable for game and keep them intact.
5. Conclusions
Applications of robotics in a forest environment requires information of vegetation-induced traversability. The findings of this study implied that high-density ALS conveys sufficient information of vegetation occupancy that can be used by forest robots for navigation. The experiments revealed generally strong agreement between vegetation occupancy maps derived from ALS and TLS. However, interpretation of the accuracy of ALS-based vegetation occupancy mapping is not straightforward due to differences in the capacities of ALS and TLS to characterise different forest structures. When using ALS for vegetation occupancy mapping, a certain level of uncertainty in the observations can be expected, specifically when applied in structurally complex forests. Altogether, the findings suggest that ALS could be used as a guidance for deciding whether a certain forest environment is traversable for forest robots. Traversable pathways could be determined regardless of the forest structure, which highlights the feasibility of ALS in assessing forest traversability. Such high-density ALS point clouds can be acquired using low altitude manned or unmanned aerial vehicles that have the capacity of covering entire forest stands or even landscapes, which is suitable for operational forestry applications.
Acknowledgments
The study was funded by the Academy of Finland and European Union »NextGenerationEU« (grant numbers 330422, 331711, 337810, 337127, 348644, 346382 and 346383. The implementation of the study was also supported by the Scanforest research infrastructure (www.scanforest.fi). The work of S. Matsuzaki was supported in part by the Leading Graduate School Program; in part by the Innovative Program for Training Brain-Science-Information-Architects by Analysis of Massive Quantities of Highly Technical Information About the Brain; and in part by the Ministry of Education, Culture, Sports, Science and Technology, Japan.
6. References
Aerts, R., Honnay, O., 2011: Forest restoration, biodiversity and ecosystem functioning. BMC Ecology 11(1): 1–10. https://doi.org/10.1186/1472-6785-11-29
Ahtiainen., J., Stoyanov, T., Saarinen, J., 2017: Normal Distributions Transform Traversability Maps: LIDAR‐Only Approach for Traversability Mapping in Outdoor Environments. Journal of Field Robotics 34(3): 600–621. https://doi.org/10.1002/rob.21657
Balenović, I., Liang, X., Jurjević, L., Hyyppä, J., Seletković, A., Kukko, A., 2020: Hand-Held Personal Laser Scanning–Current Status and Perspectives for Forest Inventory Application. Croatian Journal of Forest Engineering 42(1): 165–183. https://doi.org/10.5552/crojfe.2021.858
Barrett, M., Belward, A., Bladen, S., Breeze, T., Burgess, N., Butchart, S., Clewclow, H., Cornell, S., Cottam, A., Croft, S., de Carlo, G., 2018: Living planet report 2018: Aiming higher.
Beaton, A.E., Tukey, J.W., 1974: The Fitting of Power Series, Meaning Polynomials, Illustrated on Band-Spectroscopic Data, Technometrics 16(2): 147–185. https://doi.org/10.1080/00401706.1974.10489171
Besl, P.J., McKay, N.D., 1992: Method for registration of 3-D shapes. In Sensor fusion IV: control paradigms and data structures 1611: 586–606. Spie. https://doi.org/10.1117/12.57955
Bogoslavskyi, I., Vysotska, O., Serafin, J., Grisetti, G., Stachniss, C., 2013: Efficient traversability analysis for mobile robots using the kinect sensor. In European Conference on Mobile Robots IEEE: 158–163. https://doi.org/10.1109/ECMR.2013.6698836
Calders, K., Adams, J., Armston, J., Bartholomeus, H., Bauwens, S., Bentley, L.P., Chave, J., Danson, F.M., Demol, M., Disney, M., Gaulton, R., 2020: Terrestrial laser scanning in forest ecology: Expanding the horizon. Remote Sensing of Environment 251: 112102. https://doi.org/10.1016/j.rse.2020.112102
Cook, G., Zhang, F., 2020: Obstacle Mapping and its Application to Robot Navigation. In Mobile robots: Navigation, control and sensing, surface robots and AUVs, 2nd Edition; Cook, G., Zhang, F., Eds.; John Wiley & Sons: Hoboken, New Jersey, United States; 223–238 p. https://doi.org/10.1002/9781119534839.ch8
Dai, W., Yang, B., Liang, X., Dong, Z., Huang, R., Wang, Y., Li, W., 2019: Automated fusion of forest airborne and terrestrial point clouds through canopy density analysis. ISPRS Journal of Photogrammetry and Remote Sensing 156: 94–107. https://doi.org/10.1016/j.isprsjprs.2019.08.008
FAO, UNEP, 2020: The State of World's Forests 2020. Forests, Biodiversity and People. Rome.
Gomez, C., Fehr, M., Millane, A., Hernandez, A.C., Nieto, J., Barber, R., Siegwart, R., 2020: Hybrid topological and 3d dense mapping through autonomous exploration for large indoor environments. In International Conference on Robotics and Automation IEEE (ICRA): 9673–9679. https://doi.org/10.1109/ICRA40945.2020.9197226
Hackenberg, J., Morhart, C., Sheppard, J., Spiecker, H., Disney, M., 2014: Highly accurate tree models derived from terrestrial laser scan data: A method description. Forests 5(5): 1069–1105. https://doi.org/10.3390/f5051069
Holopainen, M., Kankare, V., Vastaranta, M., Liang, X., Lin, Y., Vaaja, M., Yu, X., Hyyppä, J., Hyyppä, H., Kaartinen, H., Kukko, A., 2013: Tree mapping using airborne, terrestrial and mobile laser scanning–A case study in a heterogeneous urban forest. Urban For Urban Greening 12(4): 546–553. https://doi.org/10.1016/j.ufug.2013.06.002
Hornung, A., Wurm, K.M., Bennewitz, M., Stachniss, C., Burgard, W., 2013: OctoMap: An efficient probabilistic 3D mapping framework based on octrees. Autonomous robots 34(3): 189–206. https://doi.org/10.1007/s10514-012-9321-0
Huertas, A., Matthies, L., Rankin, A., 2005: Stereo-based tree traversability analysis for autonomous off-road navigation. In 2005 Seventh IEEE Workshops on Applications of Computer Vision IEEE (WACV/MOTION'05) 1: 210–217. https://doi.org/10.1109/ACVMOT.2005.111
Hyyppä, E., Hyyppä, J., Hakala, T., Kukko, A., Wulder, M.A., White, J.C., Pyörälä, J., Yu, X., Wang, Y., Virtanen, J.P., Pohjavirta, O., 2020a: Under-canopy UAV laser scanning for accurate forest field measurements. ISPRS J Photogramm Remote Sensing 164: 41–60. https://doi.org/10.1016/j.isprsjprs.2020.03.021
Hyyppä, E., Yu, X., Kaartinen, H., Hakala, T., Kukko, A., Vastaranta, M., Hyyppä, J., 2020: Comparison of Backpack, Handheld, Under-Canopy UAV, and Above-Canopy UAV Laser Scanning for Field Reference Data Collection in Boreal Forests. Remote Sensing 12(20): 3327. https://doi.org/10.3390/rs12203327
Jaakkola, A., Hyyppä, J., Kukko, A., Yu, X., Kaartinen, H., Lehtomäki, M., Lin, Y., 2010: A low-cost multi-sensoral mobile mapping system and its feasibility for tree measurements. ISPRS Journal of Photogrammetry and Remote Sensing 65(6): 514–522. https://doi.org/10.1016/j.isprsjprs.2010.08.002
Jaakkola, A., Hyyppä, J., Yu, X., Kukko, A., Kaartinen, H., Liang, X., Hyyppä, H., Wang, Y., 2017: Autonomous collection of forest field reference – The outlook and a first step with UAV laser scanning. Remote Sensing 9(8): 785. https://doi.org/10.3390/rs9080785
Karaman, S., Frazzoli, E., 2011: Sampling-based algorithms for optimal motion planning. The International Journal of Robotics Research 30(7): 846–894. https://doi.org/10.1177/0278364911406761
Kukko, A., Kaijaluoto, R., Kaartinen, H., Lehtola, V.V., Jaakkola, A., Hyyppä, J., 2017: Graph SLAM correction for single scanner MLS forest data under boreal forest canopy. ISPRS Journal of Photogrammetry and Remote Sensing 132: 199–209. https://doi.org/10.1016/j.isprsjprs.2017.09.006
Liang, X., Hyyppä, J., Kaartinen, H., Lehtomäki, M., Pyörälä, J., Pfeifer, N., Holopainen, M., Brolly, G., Francesco, P., Hackenberg, J., Huang, H., Jo, H-W., Katoh, M., Liu, L., Mokros, M., Morel, J., Olofsson, K., Poveda-Lopez, J., Trochta, J., Wang, D., Wang, J., Xi, Z., Yang, B., Zheng, G., Kankare, V., Luoma, V., Yu, X., Chen, L., Vastaranta, M., Saarinen, N., Wang, Y., 2018: International benchmarking of terrestrial laser scanning approaches for forest inventories. ISPRS Journal of Photogrammetry and Remote Sensing 144: 137–179. https://doi.org/10.1016/j.isprsjprs.2018.06.021
Liang, X., Hyyppä, J., Kukko, A., Kaartinen, H., Jaakkola, A., Yu, X., 2014: The use of a mobile laser scanning system for mapping large forest plots. IEEE Geoscience and Remote Sensing Letters 11(9): 1504–1508. https://doi.org/10.1109/lgrs.2013.2297418
Liang, X., Kukko, A., Balenovic, I., Saarinen, N., Junttila, S., Kankare, V., Holopainen, M., Mokroš, M., Surový, P., Kaartinen, H., Honkavaara, E., Näsi, R., Hollaus, M., Tian, J., Yu, X., Pan, J., Cai, S., Virtanen, J.P., Wang, Y., Hyyppä, J., 2022: Close-Range Remote Sensing of Forests-The state of the art, challenges, and opportunities for systems and data acquisitions. IEEE Geoscience and Remote Sensing Magazine 10(3): 32–71. https://doi.org/10.1109/MGRS.2022.3168135
Liang, X., Kukko, A., Hyyppä, J., Lehtomäki, M., Pyörälä, J., Yu, X., Kaartinen, H., Jaakkola, A., Wang, Y., 2018: In-situ measurements from mobile platforms: An emerging approach to address the old challenges associated with forest inventories. ISPRS Journal of Photogrammetry and Remote Sensing 143: 97–107. https://doi.org/10.1016/j.isprsjprs.2018.04.019
Luoma, V., Yrttimaa, T., Kankare, V., Saarinen, N., Pyörälä, J., Kukko, A., Kaartinen, H., Hyyppä, J., Holopainen, M., Vastaranta, M., 2021: Revealing changes in the stem form and volume allocation in diverse boreal forests using two-date terrestrial laser scanning. Forests 12(7): 835. https://doi.org/10.3390/f12070835
Martínez, J.L., Morales, J., Sánchez, M., Morán, M., Reina, A.J., Fernández-Lozano, J.J., 2020: Reactive navigation on natural environments by continuous classification of ground traversability. Sensors 20(22): 6423. https://doi.org/10.3390/s20226423
Matsuzaki, S., 2022: tls_pointcloud_analysis, https://github.com/ShigemichiMatsuzaki/tls_pointcloud_analysis
Matsuzaki, S., Masuzawa, H., Miura, J., 2022: Image-Based Scene Recognition for Robot Navigation Considering Traversable Plants and Its Manual Annotation-Free Training. IEEE Access 10: 5115–5128. https://doi.org/10.1109/ACCESS.2022.3141594
Matsuzaki, S., Masuzawa, H., Miura, J., Oishi, S., 2018: 3D Semantic Mapping in Greenhouses for Agricultural Mobile Robots with Robust Object Recognition Using Robots' Trajectory. In International Conference on Systems, Man, and Cybernetics IEEE (SMC): 357–362. https://doi.org/10.1109/SMC.2018.00070
Molino, V., Madhavan, R., Messina, E., Downs, A., Balakirsky, S., Jacoff, A., 2007: Traversability metrics for rough terrain applied to repeatable test methods. In Proceedings IEEE/RSJ International Conference on Robotics and Automation (IROS): 1787–1794. https://doi.org/10.1109/IROS.2007.4399438
Mongus, D., Jurič, S., 2019: Generation of traversability maps based on 3D point-clouds. In Conference on Next Generation Computing Applications IEEE (NextComp): 1–5. https://doi.org/10.1109/NEXTCOMP.2019.8883547
Morsdorf, F., Kükenbrink, D., Schneider, F.D., Abegg, M., Schaepman, M.E., 2018: Close-range laser scanning in forests: towards physically based semantics across scales. Interface Focus 8(2): 20170046. https://doi.org/10.1098/rsfs.2017.0046
Oliveira, L.F., Moreira, A.P., Silva, M.F., 2021: Advances in forest robotics: A state-of-the-art survey. Robotics 10(2): 53. https://doi.org/10.3390/robotics10020053
Pan, Y., Birdsey, R.A., Fang, J., Houghton, R., Kauppi, P.E., Kurz, W.A., Phillips, O.L., Shvidenko, A., Lewis, S.L., Canadell, J.G., Ciais, P., 2011: A large and persistent carbon sink in the world's forests. Science 333(6045): 988–993. https://doi.org/10.1126/science.1201609
Papadakis, P., 2013: Terrain traversability analysis methods for unmanned ground vehicles: A survey. Engineering Applications of Artificial Intelligence 26(4): 1373–1385. https://doi.org/10.1016/j.engappai.2013.01.006
Puliti, S., Ørka, H.O., Gobakken, T., Næsset, E., 2015: Inventory of small forest areas using an unmanned aerial system. Remote Sensing 7(8): 9632–9654. https://doi.org/10.3390/rs70809632
Raumonen, P., Kaasalainen, M., Åkerblom, M., Kaasalainen, S., Kaartinen, H., Vastaranta, M., Holopainen, M., Disney, M., Lewis, P., 2013: Fast automatic precision tree models from terrestrial laser scanner data. Remote Sensing 5(2): 491–520. https://doi.org/10.3390/rs5020491
Ritter, E., Dauksta, D., 2013: Human–forest relationships: ancient values in modern perspectives. Environment, Development and Sustainability 15(3): 645–662. https://doi.org/10.1007/s10668-012-9398-9
Rusu, R.B., Blodow, N., Beetz, M., 2009: Fast Point Feature Histograms (FPFH) for 3D registration. In International Conference on Robotics and Automation IEEE (ICRA): 3212–3217. https://doi.org/10.1109/ROBOT.2009.5152473
Segal, A.V., Haehnel, D., Thrun, S., 2009: Generalized-ICP. Robotics: science and systems 2(4): 1–8. https://doi.org/10.15607/RSS.2009.V.021
Sock, J., Kim, J., Min, J., Kwak, K., 2016: Probabilistic traversability map generation using 3D-LIDAR and camera. In International Conference on Robotics and Automation IEEE (ICRA): 5631–5637. https://doi.org/10.1109/ICRA.2016.7487782
Suger, B., Steder, B., Burgard, W., 2015: Traversability analysis for mobile robots in outdoor environments: A semi-supervised learning approach based on 3D-lidar data. In International Conference on Robotics and Automation IEEE (ICRA): 3941–3946. https://doi.org/10.1109/ICRA.2015.7139749
Tang, J., Chen, Y., Kukko, A., Kaartinen, H., Jaakkola, A., Khoramshahi, E., Hakala, T., Hyyppä, J., Holopainen, M., Hyyppä, H., 2015: SLAM-aided stem mapping for forest inventory with small-footprint mobile LiDAR. Forests 6(12): 4588–4606. https://doi.org/10.3390/f6124390
Toman, M.A., Ashton, P.M.S., 1996: Sustainable forest ecosystems and management: a review article. Forest Science 42(3): 366–377. https://doi.org/10.1093/forestscience/42.3.366
Wang, Y., Lehtomäki, M., Liang, X., Pyörälä, J., Kukko, A., Jaakkola, A., Liu, J., Feng, Z., Chen, R. Hyyppä, J., 2019: Is field-measured tree height as reliable as believed – A comparison study of tree height estimates from field measurement, airborne laser scanning and terrestrial laser scanning in a boreal forest. ISPRS J Photogramm Remote Sensing 147: 132–145. https://doi.org/10.1016/j.isprsjprs.2018.11.008
Wallace, L., Lucieer, A., Watson, C., Turner, D., 2012: Development of a UAV-LiDAR system with application to forest inventory. Remote Sensing 4(6): 1519–1543. https://doi.org/10.3390/rs4061519
Westoby, M.J., Brasington, J., Glasser, N.F., Hambrey, M.J., Reynolds, J.M., 2012: ‘Structure-from-Motion' photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 179: 300–314. https://doi.org/10.1016/j.geomorph.2012.08.021
Wilkes, P., Lau, A., Disney, M., Calders, K., Burt, A., de Tanago, J.G., Bartholomeus, H., Brede, B., Herold, M., 2017: Data acquisition considerations for terrestrial laser scanning of forest plots. Remote Sensing of Environment 196: 140–153. https://doi.org/10.1016/j.rse.2017.04.030
Yrttimaa, T., Saarinen, N., Kankare, V., Viljanen, N., Hynynen, J., Huuskonen, S., Holopainen, M., Hyyppä, J., Honkavaara, E., Vastaranta, M., 2020: Multisensorial Close-Range Sensing Generates Benefits for Characterization of Managed Scots Pine (Pinus sylvestris L.) Stands. ISPRS International Journal of Geo-Information 9(5): 309. https://doi.org/10.3390/ijgi9050309
Yrttimaa, T., 2021: Characterizing tree communities in space and time using point clouds. Dissertationes Forestales 314: 52 p. https://doi.org/10.14214/df.314
Yrttimaa, T., Luoma, V., Saarinen, N., Kankare, V., Junttila, S., Holopainen, M., Hyyppä, J., Vastaranta, M., 2022: Exploring tree growth allometry using two-date terrestrial laser scanning. Forest Ecology and Management 518: 120303. https://doi.org/10.1016/j.foreco.2022.120303
Yrttimaa, T., Junttila, S., Luoma, V., Calders, K., Kankare, V., Saarinen, N., Kukko, A., Holopainen, M., Hyyppä, J., Vastaranta, M., 2023: Capturing seasonal radial growth of boreal trees with terrestrial laser scanning. Forest Ecology and Management 529: 120733. https://doi.org/10.1016/j.foreco.2022.120733
Zhang, Z., 1994. Iterative point matching for registration of free-form curves and surfaces. International Journal of Computer Vision 13(2): 119–152. https://doi.org/10.1007/BF01427149
Zhao, G., Shao, G., Reynolds, K.M., Wimberly, M.C., Warner, T., Moser, J.W., Rennolls, K., Magnussen, S., Köhl, M., Anderson, H.E., Mendoza, G.A., 2005: Digital forestry: A white paper. Journal of Forestry 103(1): 47–50. https://doi.org/10.1093/jof/103.1.47
Zhou, Y., Huang, Y., Xiong, Z., 2021: 3D traversability map generation for mobile robots based on point cloud. In IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM): 836–841. https://doi.org/10.1109/AIM46487.2021.9517463
Zhu, X., Lu, H., Yang, X., Li, Y., Zhang, H., 2013: Stereo vision based traversable region detection for mobile robots using uv-disparity. In Proceedings of the 32nd Chinese Control Conference IEEE: 5785–5790.
Zhou, Q., Park, J., Koltun, V., 2018: Open3D: A Modern Library for 3D Data Processing.
© 2023 by the authors. Submitted for possible open access publication under the
terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Authors' addresses:
Tuomas Yrttimaa, PhD *
e-mail: tuomas.yrttimaa@uef.fi
Ville Kankare, PhD
e-mail: ville.kankare@uef.fi
Samuli Junttila, PhD
e-mail: samuli.junttila@uef.fi
Ninni Saarinen, PhD
e-mail: ninni.saarinen@uef.fi
Prof. Mikko Vastaranta, PhD
e-mail: mikko.vastaranta@uef.fi
School of Forest Sciences
University of Eastern Finland
80101 Joensuu
FINLAND
Shigemichi Matsuzaki, PhD
e-mail: matsuzaki@aisl.cs.tut.ac.jp
Prof. Jun Miura, PhD
e-mail: jun.miura@tut.jp
Department of Computer Science and Engineering
Toyohashi University of Technology
Toyohashi
JAPAN
Prof. Antero Kukko, PhD
e-mail: antero.kukko@nls.fi
Prof. Juha Hyyppä, PhD
e-mail: juha.hyyppa@nls.fi
Department of Photogrammetry and Remote Sensing
Finnish Geospatial Research Institute
National Land Survey of Finland
02430 Masala
FINLAND
* Corresponding author
Received: November 3, 2022
Accepted: January 9, 2023
Original scientific paper