Technodiversity – Glossary of Forest Operations Terms
doi: 10.5552/crojfe.2024.2364
volume: 45, issue: 2
pp: 10
- Author(s):
-
- Erler Jörn
- Đuka Andreja
- Papa Ivica
- Bade Clara
- Borz Stelian Alexandru
- Lindroos Ola
- Lundbäck Mikael
- Mederski Piotr S.
- Bembenek Mariusz
- Mionetto Nathalie
- Magagnotti Natascia
- Simonetti Marco
- Stampfer Karl
- Pavelić Niko
- Spinelli Raffaele
- Article category:
- Original scientific paper
- Keywords:
- forest engineering, harvesting operations, e-learning, Moodle
Abstract
HTML
The Technodiversity project addresses technological diversity by gathering a common basis of technological knowledge and increasing the sensitivity for diversity in forest engineering. It aims to bring together and make generally available the existing knowledge in forest operations that is scattered across various European countries. It will serve as a bridge between different regions of Europe and generations of students, practitioners, scientists and academics. In this article, a small part of the e-learning module (https://technodiversity-moodle.ibe.cnr.it/) is presented in a glossary of some of the terms of forest operations.
Technodiversity – Glossary of Forest Operations Terms
Jörn Erler, Andreja Đuka, Ivica Papa, Clara Bade, Stelian A. Borz, Ola Lindroos, Mikael Lundbäck, Piotr S. Mederski, Mariusz Bembenek, Nathalie Mionetto, Natascia Magagnotti, Marco Simonetti, Karl Stampfer, Niko Pavelić, Raffaele Spinelli
Abstract
The Technodiversity project addresses technological diversity by gathering a common basis of technological knowledge and increasing the sensitivity for diversity in forest engineering. It aims to bring together and make generally available the existing knowledge in forest operations that is scattered across various European countries. It will serve as a bridge between different regions of Europe and generations of students, practitioners, scientists and academics. In this article, a small part of the e-learning module (https://technodiversity-moodle.ibe.cnr.it/) is presented in a glossary of some of the terms of forest operations.
Keywords: forest engineering, harvesting operations, e-learning, Moodle
1. Introduction
Forestry faculties generally offer training specialisations in forest economics, planning, and engineering/ operations (Fjeld et al. 2014). Analysis and planning skills are keys to enhancing industrial competitiveness and provide training, which is a challenge for forestry education. Forest operations tend to replace traditional specialisation with standard protocols, with little regard for local diversity in environment, climate, and societal needs. The consequence is often increased damage to stands and soils and a decline or neglect in knowledge about traditional solutions developed from experience.
Words and scientific terms follow a dynamic evolution. An example is the term »degree of mechanisation« in forestry. There are several explanations:
Quantitative: the percentage of forest products that are harvested with machines, sometimes also called level of mechanisation (Staaf and Wiksten 1984, Lundbäck et al. 2021)
Qualitative as a description of a working method:
Relative: concerning the actual local standard, often using comparative phrases like »higher mechanised methods«
Absolute: building classes that describe the different combinations of machines.
There is a consensus that subprocesses that are organised in working cycles can be divided into three classes called
manual work (e.g., hand saw, axe, manual or animal extraction)
motor-manual work (with powered tools like chainsaw and brush-cutter)
mechanised work (using self-propelled machines).
The problem arises when two or more subprocesses are combined into a working process. Heinrich (1983) distinguishes between labour-intensive, intermediate and completely mechanised methods in this case. Harstela (1993) has comparable systematics with basic (e.g., axe, hand saw, animal or manual extraction), intermediate (e.g., chainsaw, tractor transport) and mechanised methods (e.g., harvester, forwarder). Erler (2000) has suggested the use of four classes: non-mechanised (solely manual work), semi-mechanised (manual work combined with motor-manual or mechanised work), highly mechanised (motor-manual work combined with mechanised work) and fully mechanised (only machines working). Lundbäck et al. (2021) propose a differentiation between non-mechanised, partly mechanised, and fully mechanised methods.
To understand the differences, the following examples are presented:
Option 1: The standard method with a harvester and a forwarder, using trails with a defined distance (20 m). According to Heinrich (1983), this method is called »completely mechanised«. Harstela (1993) calls it »mechanised«. For Erler (2000), Triplat and Krajnc (2021), Rosińska et al. (2021) and Haavikko et al. (2022), this process is a »fully mechanised method/harvesting/process«. Also, following Lundbäck et al. (2021), the method is »fully mechanised« and Zemánek and Fiľo (2022) use slightly different wording »fully mechanised short-length logging method«. All authors use a similar wording.
Option 2: The trees are felled and processed motor-manually using a chainsaw, pre-skidded (collected), and skidded with a tractor. Heinrich (1983) and Harstela (1993) would call it »intermediate«; for Erler (2000), it is »highly mechanised«, while Lundbäck et al. (2021) will call it »partly mechanised«.
Option 3: Again, the trees are felled and processed with a chainsaw, collected by a horse, and skidded with the tractor. Heinrich (1983), Harstela (1993) and Lundbäck et al. (2021) will define it with the word »intermediate« and »partly mechanised«, respectively, while Erler (2000) refers to it as »semi-mechanised« due to the use of a horse.
Stikes et al. (1989) reported that changes in forest management and increased utilisation of the forest brought new products, adding to the scope of forest engineering terminology. With the increasing cost and complexity of forest operations, there is an ever-growing need to standardise forest engineering terminology.
The Technodiversity project (Erasmus+ programme Action Type KA220-HED – Cooperation partnerships in higher education), whose results are partly presented in this article, acknowledges the extensive and valuable variety of local conditions and promotes a better sensitivity to technological diversity. Lectures and a glossary with facts and methods are the knowledge base, where the most typical technological sub-processes for wood harvesting are presented and assessed (Đuka 2022, Erler et al. 2022, Erler et al. 2023). As a core task of the project, confusing and sometimes contradicting traditions and definitions are discussed and, to some extent, harmonised. The consensus is explained by the e-learning tool and – in parallel – presented by an alphabetic glossary fully available at https://technodiversity-moodle.ibe.cnr.it/. In this article, a small part of the glossary is presented as of April 2024. Consequently, as a learning tool, it can and probably will be changed continuously.
2. Glossary
Advanced mechanised work – The term mechanised work describes the degree of mechanisation of a technical operation. Other degrees are manual work and motor-manual work. Mechanised work can further be divided into simple, advanced and automatic work. When the machine takes over the auxiliary function to handle the object using a crane or a grapple, e.g., it is called advanced mechanised work. A typical example is a tractor or forwarder equipped with a loader. In this case, the driver can control all critical functions of the system. Given the hazards of forest work, this can be an important improvement in safety and ergonomics – not just production efficiency.
Automatic work – The term mechanised work describes the degree of mechanisation of a technical operation. Other degrees are manual work and motor-manual work. Mechanised work can further be divided into simple, advanced and automatic work. Automatic work can be subdivided into different degrees of automation: 1) information assistance (by sensors), 2) control assistance (by electrohydraulic control, e.g.), 3) automation of sub-processes and 4) driverless operations. In forestry, the cut-to-length harvester is an example of a machine with partly automatic work (at level 3). Some prototypes try to operate driverless (at level 4).
Chip method – The chip method is one of four different functional groups of harvesting methods. The others are fulltree, tree length and cut-to-length method. With chip methods, the wood is chipped before it reaches the forest road. The two most common alternatives are: An integrated feller-chipper (a) fells the trees and chips them in a single pass. Chips are blown into a container, carried by the feller-chipper or by an auxiliary vehicle; or (b) the trees are felled, moved to the trail and chipped there.
Cut-to-length method – The cut-to-length (CTL) method is one of four different functional groups of harvesting methods. The others are fulltree, tree length and chip method. The character of CTL method is that the trees are brought to the forest road in the form of short logs. There are several ways to do it: (a) trees are converted into logs directly in the stand (i.e., felling-delimbing-crosscutting in a single pass); (b) trees can be delimbed inside the stand right after felling, but they are crosscut into logs after the stem lengths have been pre-skidded to the trail; (c) full trees may be pre-skided to the trail and delimbed and cross-cut there – so they are extracted as logs; and (d) after extraction, the logs can be transported directly to the factory as such or turned into chips before transport.
Degree of mechanisation – The term is commonly used, but the content of this term varies.
In case of a single subprocess it differentiates to:
Manual work: Everything is done by humans or animals, as a maximum a hand tool is used
Motor-manual work: The energy is coming from a machine that is handled by a human being. Thus, the weight is limited. Typical examples are the work with a chainsaw or with a brush-cutter
Mechanised work: When the machine is self-propelled, the weight limitation is much lower. Consequently, the machine can have more power and be optimised for the task. Mechanised work can be subdivided into several steps:
3.1) Simple mechanised work offers increased power and mobility, but humans do all auxiliary functions. Example: a cable skidder can move larger loads than a human can, and does that at a higher speed. However, the attachment of the logs must be done manually by the operator
3.2) Advanced mechanised work occurs when the machine also takes over the auxiliary function to handle the object using a crane or a grapple, e.g., but the operator must steer all actions. A typical example is a tractor or forwarder equipped with a loader
3.3) Automatic work.
In case of two sub-processes: Usually a whole harvesting process combines two or more sub-processes (Fig. 1). If both sub-processes are in the same category, the method is fully manual, fully motor-manual, or fully mechanised. If categories differ, the name of the highest category is taken and the adjective »partly« is added. For example a partly motor-manual method uses a chainsaw for tree cutting and processing and a horse for timber extraction.
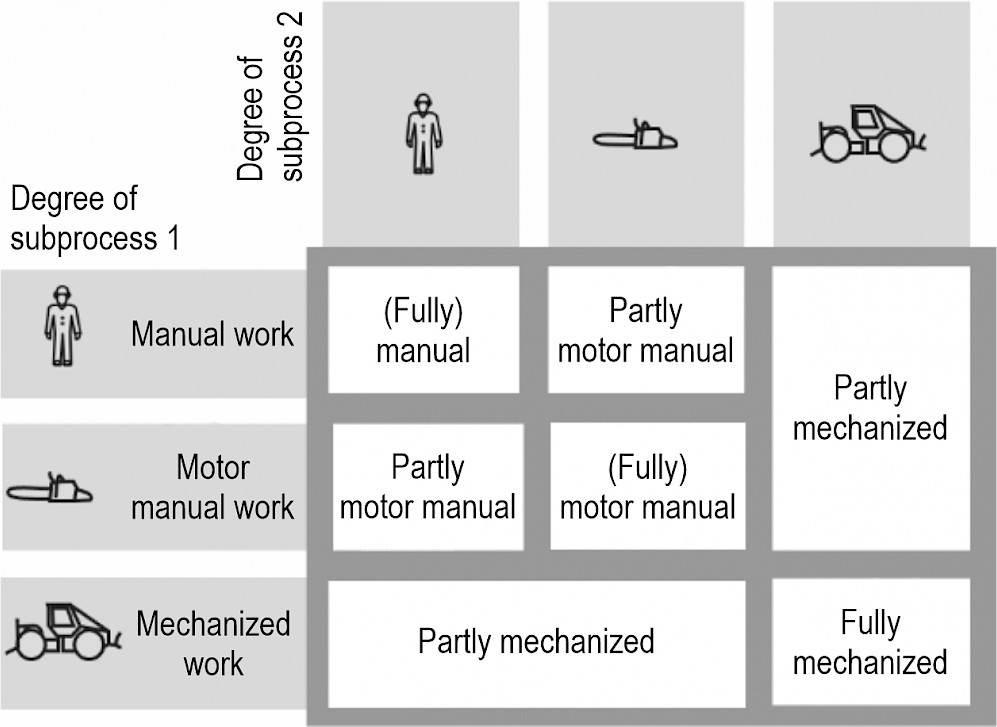
Fig. 1 Degree of mechanisation with two sub-processes
In case of more than two sub-processes: In some cases, there are more than two sub-processes combined (Fig. 2). In this case, the degree of mechanisation of two sub-processes is first considered and then the degree of mechanisation of the third sub-process is added. The terms of the degree of mechanisation are the same as with two sub-processes.

Fig. 2 Degree of mechanisation with more than two sub-processes
Eco-efficiency – A partial objective of decision-making (Fig. 3). It asks for the minimal ecological input to reach a certain effect or results in a maximum effect under given ecological input. In the technical aspect, the ecological input is the energy consumption and grey energy (for construction, maintenance and final recycling purposes of the machines and sites); for forest technology, the impact to the forest soil, stand, etc. must be considered. Together with its twin ecological compatibility, the ecological suitability can be assessed as a sub-objective to find the optimal option. Parallel to the ecological suitability, the economic and social suitability should also be considered.
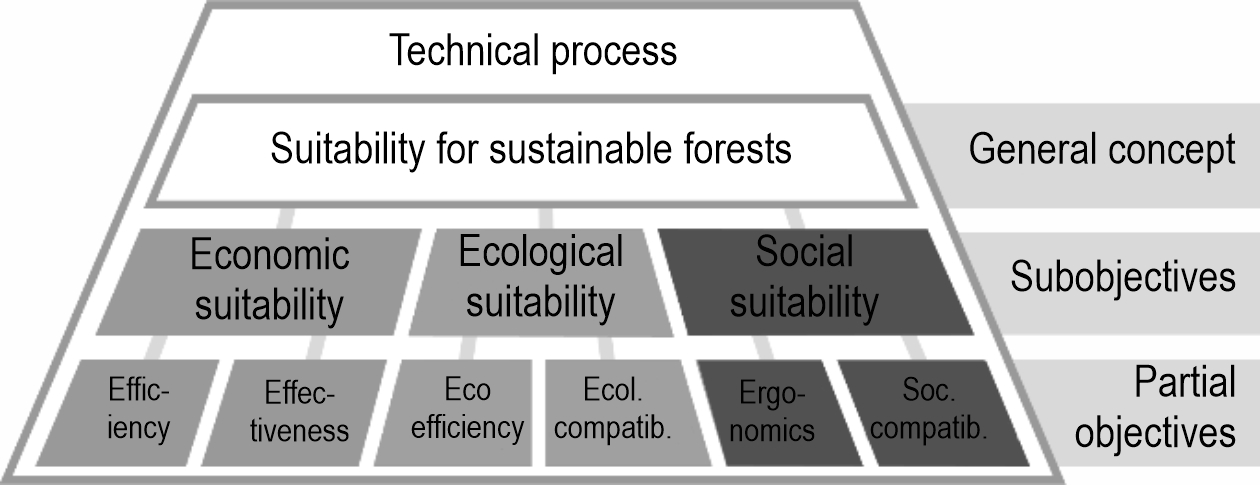
Fig. 3 Decision making in harvesting operations
Ecological compatibility – A partial objective of decision-making (Fig. 3). It considers disturbances in nature and environment that will not be regenerated in a reasonable time, trying to minimise them. Not all actions will have a negative effect, but it is highly probable that some damage will occur, so risks and side-effects should be considered. With its twin eco-efficiency, the ecological suitability of one sub-objective can be assessed to find the optimal option. Parallelly, the economic and social suitability should be considered.
Ecological suitability – A sub-objective of decision-making process (Fig. 3). It corresponds to the ecological objective of the company or legislative requirements in a means-end-relationship, i.e. the means should be developed so as to fulfil the objectives set by the companies and legislative requirements. The ecological suitability is subdivided into eco-efficiency and ecological compatibility. The two competing sub-objectives are on the same level: the economic and social suitability. The relationship between them can be organised by the general concept for technical operations.
Economic effectiveness - A partial objective of decision-making (Fig. 3). It assesses the effect of any action against the background of what it is intended to reach. Effectiveness can be described as functionality or coverage. Based on economic effectiveness and its twin, economic efficiency, the economic suitability can be assessed to find the optimal option.
Economic efficiency – A partial objective of decision-making (Fig. 3). It asks for the minimum input to reach a certain effect or the maximum effect under a given input.
Economic suitability – A sub-objective of decision-making process. It corresponds to the economic objective of the company in a means-end relationship. The means should be developed so as to fulfil the objective set by the company.
Extraction – One of the main functions of harvesting and means the change of the position of the working object. In forest operations, three steps are differentiated: 1) From the felling site to the next facility provided for transport purposes like a strip road, trail or corridor, i.e. pre-skidding or, in case of a yarder – lateral yarding. If the machines are allowed to drive in the stand without limitation of the traffic infrastructure network, this step of pre-skidding is obsolete; 2) Alongside the trail to the landing site where the logs can be handed over to the long-distance transport, i.e. skidding, forwarding and yarding depending on the machine used for timber transport; 3) From the landing site in the forest to the customer, i.e. long-distance transport uses public roads, waterways, railways, etc.
Full tree method – One of four different functional groups of harvesting methods. The others are tree length, cut-to-length and chip method. With the full tree method, trees are cut down and then taken as full trees to the forest road. Further (long-distance) transport can be: (a) full trees are loaded on special trailers and transported to the factory; (b) once at the forest road, trees are delimbed and topped and transported to the factory as tree lengths; (c) at the forest road, trees are crosscut at pre-defined lengths and transported to the factory as logs; (d) the logger opts for chipping the whole trees rather than delimbing and crosscutting them.
Functionalising – The first step of the three-step model (Fig. 4) of decision-making in forest technology. The second step is localising and the third one is individualising. The first step aims at finding and designing all technical solutions for harvesting processes that can work under local conditions and technical constraints of the stand. Here, available machines and operators are combined into working methods that can be used to do the necessary job. To expand the search space as much as possible, several options should be selected that differ greatly from one another (different machines, different degrees of mechanisation, etc.). And one option should never be forgotten: the option to do nothing, the so-called zero-option.
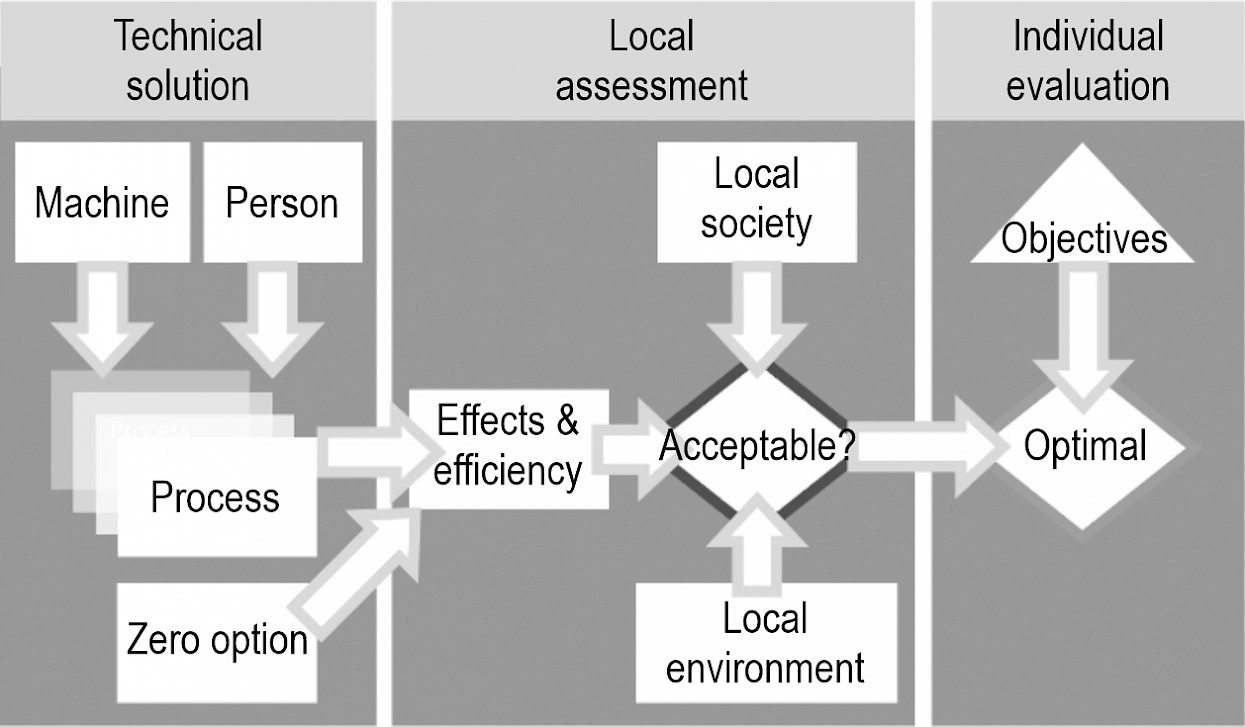
Fig. 4 A three-step-model of decision-making in forest technology
Manual method – In the Technodiversity project, the total harvesting process is normally seen as a combination of several sub-processes. Each sub-process has a certain degree of mechanisation. Combining these single degrees gives the degree of mechanisation of the total method. There are five degrees of mechanisation: (fully) manual method, partly motor-manual method, (fully) motor-manual method, partly mechanised method, fully mechanised method. If there is no power equipment in any sub-process, i.e. both sub-processes are done by manual work, the method is fully manual. Fully manual methods are not unusual in developing countries or in part-time work. The word »fully« underlines the character of the process, but it can be omitted.
Manual Work – The degree of mechanisation of a technical operation. Other degrees are motor-manual work and mechanised work. If the action is made by workers using just their force (and at most a hand tool), then it is called manual work. In forestry, manual work is not so rare. For example, much tree planting is based on manual work. Even in harvesting operations, the axe and the hand saw have been popular for a long time. Strictly speaking, the use of animals is not proper manual work since workers do not use their force to act, but it can be included in the manual work category for the sake of simplicity.
Mechanised method – The total harvesting process is normally seen as a combination of several sub-processes. Each sub-process has a certain degree of mechanisation. There are five degrees of mechanisation: (fully) manual method, partly motor-manual method, (fully) motor-manual method, partly mechanised method, fully mechanised method. If all sub processes are done with self-propelled machines, the method is a fully mechanised method or simpler: mechanised method. Typically, that occurs when the harvester-forwarder team or the feller-buncher and skidder team are employed.
Mechanised work – When the engine is no longer portable but needs a carrier. Since the machine weight is no longer limited by the weak carrying power of humans, the machine can be developed without any mass restrictions. Currently, a steady increase in machine weight is being observed in the pursuit of higher power and efficiency. Mechanised work can be further subdivided into simple mechanised work, advanced mechanised work and automatic work.
Motor-manual method – The total harvesting process is normally seen as a combination of several sub-processes. Each sub-process has a certain degree of mechanisation. The combination of these single degrees gives the degree of mechanisation of the total method. There are five degrees of mechanisation: (fully) manual method, partly motor-manual method, (fully) motor-manual method, partly mechanised method, fully mechanised method. If both sub-processes are done by motor-manual work, the total process is a fully motor-manual method (or simpler: motor-manual method). Examples are few; in practice the use of a chainsaw and a motor-manual winch can be seen.
Motor-manual work – The term machine work describes the level of mechanisation of a technical operation. Other levels are manual work and mechanised work. Since manual work is tiresome, people have always looked for some external power source. In modern times, the obvious step is to use an engine to drive the tool – hence the appearance of portable machines. Typical examples of motor-manual work in forestry are the work with a chainsaw or with a brush cutter.
Natural regeneration of soil – Any soil compaction can be recovered by physical power (like frost or mechanical lifting) or by biological activities (roots, micro-organisms, worms, etc.). Biological activities get their power by life processes that depend on breathing. Due to this reason, the measurement of carbon dioxide (CO2) in the pores is a valid indicator for biological actions. In biologically active soils, the percentage (on volume) of CO2 is about 0.3%, which is a bit higher than in the outside air. Directly after traffic, a quick increment of CO2 in the soil pores is observed. After a couple of hours, the percentage of CO2 can go down again, where biological activities from all directions probably open the pores in the soil again. Thus, though the specific soil pressure may be high, when the affected soil volume is small and the lateral area is large, as is the case with human footprints or animal steps, then recovery is very quick (Fig. 5). When a light tractor (<5 t) drives on the soil, the impact is higher. For the first few months, the percentage of CO2 is significantly higher, with a tendency to recover during the first year. Of course, much depends on the gross weight of the tractor, number of passes, soil type, moisture, etc. When a harvester with a gross weight >15 tons drives on the soil, the impact is so high that the percentage of CO2 increases in the first few months and may exceed the 1.0%vol threshold.
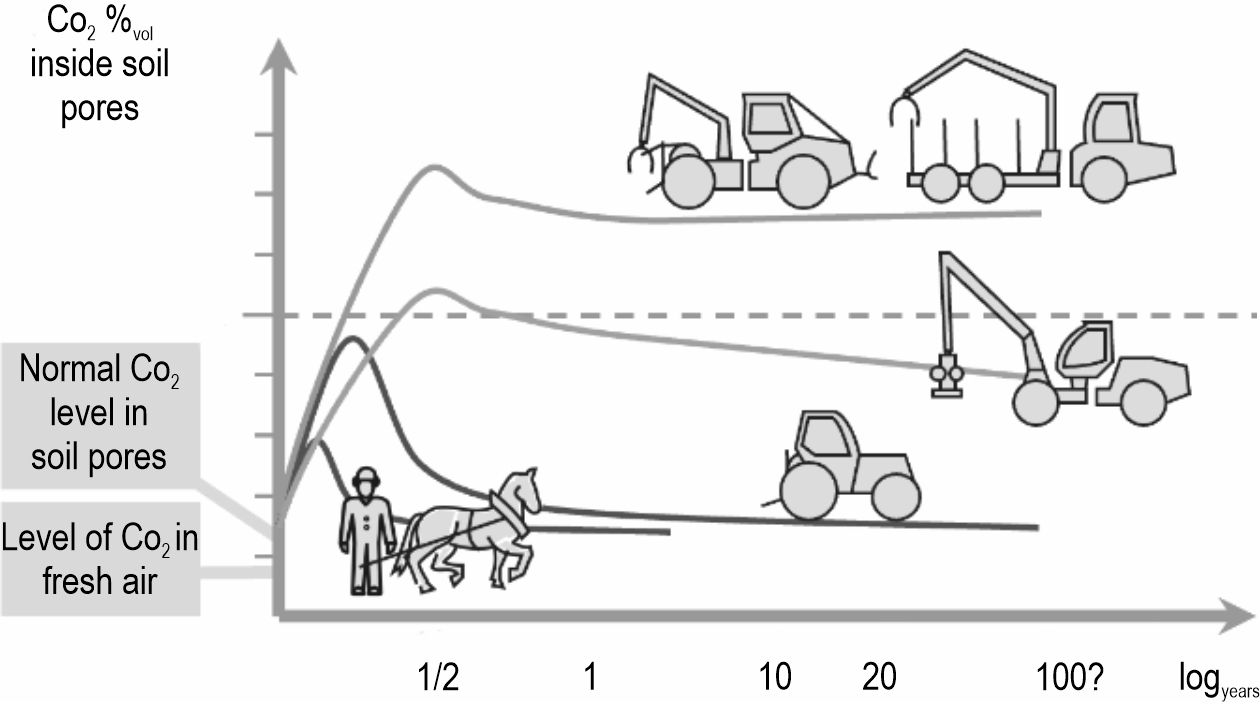
Fig. 5 Natural regeneration of forest soil
Partly mechanised method – The total harvesting process is normally seen as a combination of several sub-processes. Each sub-process has a certain level of mechanisation. The degree of mechanisation describes the combination of these levels. There are five degrees of mechanisation: (fully) manual method, partly motor-manual method, (fully) motor-manual method, partly mechanised method, fully mechanised method. If one sub-process is done by manual or motor-manual work and the other by mechanised work, then the method is partly mechanised. Examples are: chainsaw and skidder, chainsaw and forwarder, or hand tool and tractor.
Partly motor-manual method – As mentioned above, there are five degrees of mechanisation: (fully) manual method, partly motor-manual method, (fully) motor-manual method, partly mechanised method, fully mechanised method. If one sub-process is done by manual work and the other by motor-manual work, then the method is a partly motor-manual method. Examples are: chainsaw and horse or chainsaw and extraction by hand.
Prevention of rutting – Based on three types of ruts on soil, combined with the behavior of soil lumps when thrown against any surface, the Bavarian LWF (LWF 2012) has developed a practical reference sheet (Fig. 6):
If you have type 1 and the soil lump is stable, you may drive
If you have type 3, then stop driving immediately
If you have type 2 and the soil lump can be formed easily, you should try to drive very carefully:
if the ruts stay at type 2, then go on driving
if they turn to type 3:
reduce the load or the tire pressure and repeat the test
if they still turn to type 3, then stop!
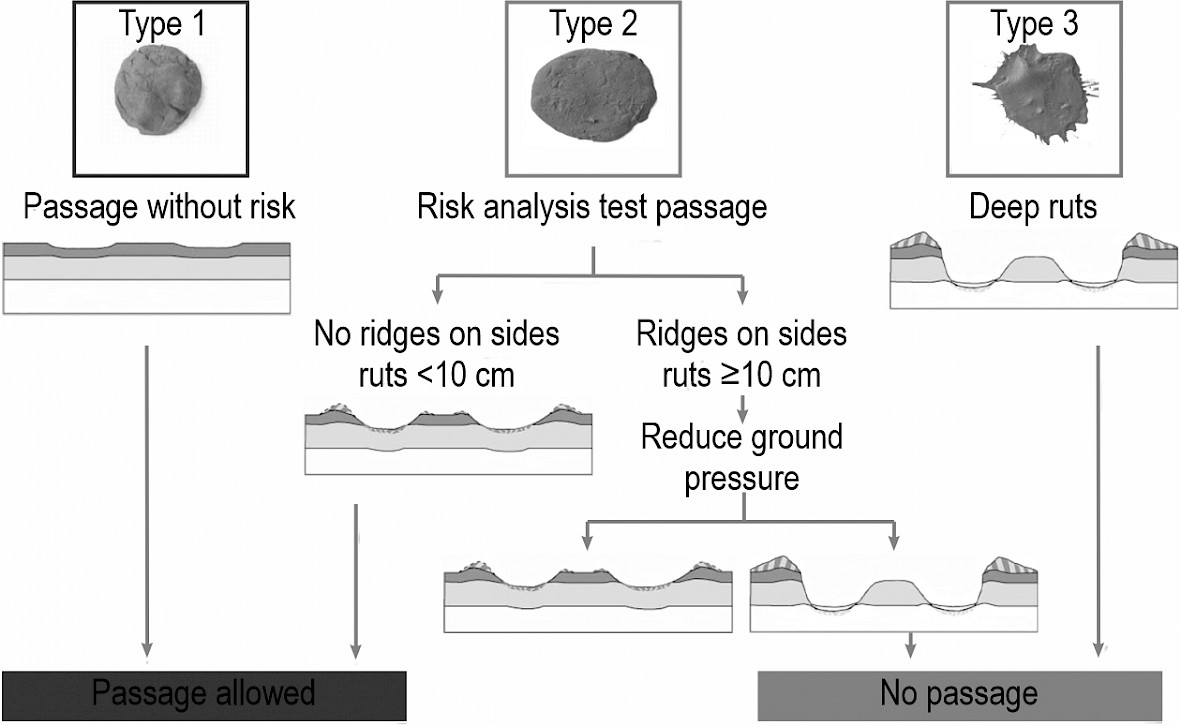
Fig. 6 Reference list to avoid rutting (LWF 2012)
Simple mechanised work – The term mechanised work describes the level of mechanisation of a technical operation. Other levels are manual work and motor-manual work. Mechanised work can further be divided into simple, advanced and automatic work. Simple mechanised work offers increased power and mobility, but humans do all auxiliary functions. Example: a cable skidder, which can move larger loads than a human can, and does that at a higher speed. However, the attachment of the logs must be done manually by the operator.
Soil damage – The model of soil damage acts on the assumption of three soil conditions:
Untouched forest soil: biologically healthy and productive
Trafficable trail: compacted by former traffic and strong enough for future traffic
Destroyed trail: impacted by former traffic and no longer usable.
Under traffic load, soil is transformed from untouched soil (A) to trafficable trail (B). After traffic , it may have a chance to find a way back to condition (A) by biological (worms, roots…) and physical (frost) influences. As long as this happens in a reasonable time (before the next impact), it can be called an elastic deformation. The traffic with heavy machines often causes a plastic deformation, which means that no natural regeneration will happen in a reasonable period. Plastic deformation should not be regarded as damage as long as the technical function of the trail is the owner's priority. The compacted trail can be used for future harvesting operations, too, as long as it maintains its technical functionality. This has the advantage that next time the rate of compacted soil will not increase. Therefore, permanent trails as a central idea of eco-efficiency is a must. No absolute answer can be found to the question of how much of the soil is allowed to be fixed for technical purposes. This is up to the owner. Consequently, any further soil degradation towards destroyed trail (condition C) must be avoided. There are two tactics: 1) to stop the operation immediately when critical signs occur, or 2) to shape the harvesting system so that the likelihood of any damage is minimised. Sometimes, the trail will be destroyed in a way that it will not allow any more trafficability, and then it should be repaired by technical means (road construction) to recover its technical functionality.
Tree length method – One of four different functional groups of harvesting methods. The others are full tree, cut-to-length and chip method. With the tree length method, two beginnings are possible: (a) either the tree is delimbed at the felling site and moved as a tree length to the forest road; or (b) it is felled, pre-skidded to the strip road as a full tree and delimbed there, before extraction to the forest road. The tree reaches the forest road as a tree length in both cases. Once at the forest road, the tree length can be transported to the factory as such (c), or cross-cut into logs before transport (d) or even chipped at the roadside and transported as chips (e).
Types of ruts on trails – Due to machine traffic, soils react differently to compaction. The Eidgenössische Forschungsanstalt WSL (Lüscher et al. 2019) has classified ruts on trails according to three types (Fig. 7):
Small ruts occur witnessing to some degree of compaction, but there are no ridges on the sides. This type of rut is very stable and allows for further passages.
Ridges appear at the sides of the ruts; they derive from the soil being pushed aside by the wheel. This type is stable, too, but the ridges indicate that the limit of trafficability is close.
New ridges appear, derived from semi-liquid soil flowing out of the ruts. This is a clear indicator that traffic must be stopped.
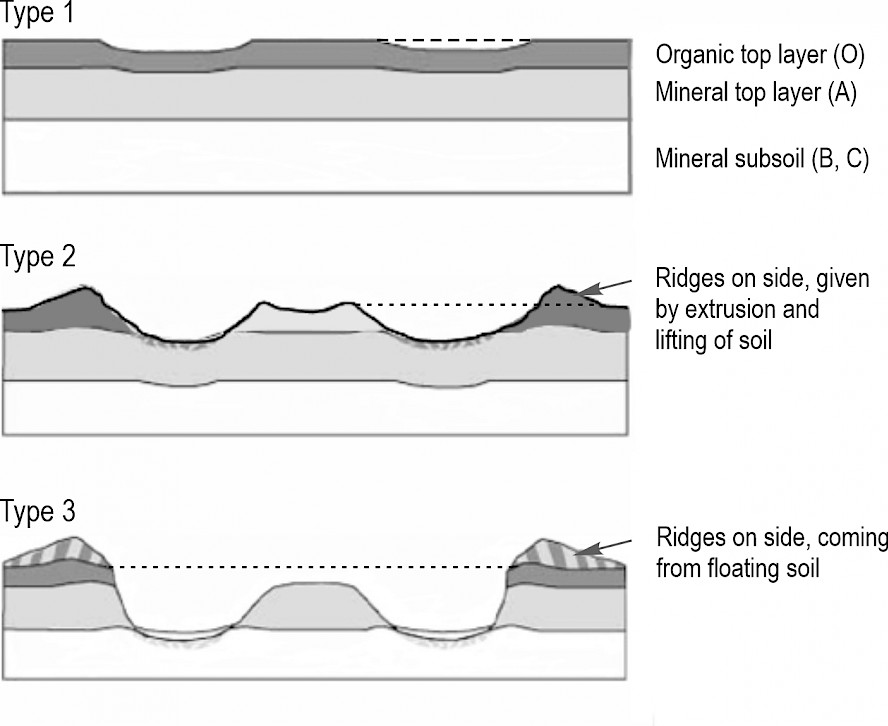
Fig. 7 Rut classification according to Eidgenössische Forschungsanstalt WSL
Working method – Describes a special working process. In contrast to the term process, which only describes what actually happens, the working method has a more normative implication. It defines which system elements are combined, and in which steps they are concatenated. The most important information is: what kind of tool or machine is used, what are the inputs and what outputs are desired.
3. Final remarks
When introducing the training to students, Fjeld et al. (2014) described it as a journey towards a remote destination with the road map as task framework. Important factors for motivation during this journey are the reality and challenge of the learning experience. The authors need a better balance between understanding context and tasks versus learning methods for better solutions. Lundbäck et al. (2021) conclude that there is a need for a globally applicable framework to systematically classify and exemplify the key terms in forest engineering since it is a common fact that a variety of terms and differences in ecological, legal, social, and economic factors affect guidelines for commercial activities, i.e. timber harvesting, that in the end influence the choices of harvesting methods and systems (Nordfjell et al. 2004, Ghaffariyan 2014). In that context, the idea of the Techkodiversity project arose in harmonising European education in forest engineering by implementing an e-learning platform to support the adaptation and evaluation of forest operations. In the whole process, the need for a glossary became evident, and a small part of it is given in this article, while the rest can be found on the project webpage: https://technodiversity-moodle.ibe.cnr.it/.
Acknowledgments
This research was funded by the Erasmus+ program of the European Union, Action Type KA220-ED Cooperation partnerships in higher education under the Grant Agreement N°: 2021-1-DE01-KA220-ED-000032038 Technodiversity.
4. References
Đuka, A., 2022: Technodiversity: harmonising European education in forest engineering by implementing an E-learning platform to support adaptation and evaluation of forest operations. Sumarski List 146 (9–10): 460–461.
Erler, J., 2000: Forsttechnik – Verfahrensbewertung. UTB 2179, Ulmer Stuttgart, Germany.
Erler, J., Spinelli, R., Đuka, A., 2022: Technodiversity – an e-learning tool as an additional offer for the master's degree and in-company training. Sustainability 14(23): 15851. https://doi.org/10.3390/su142315851
Erler, J., Spinelli, R., Borz, S.A., Mederski, P.S, 2023: Technodiversity. Transilvania University Press, Brasov, Romania, 177 p.
Fjeld, D., D'Amours, S., Eriksson, L.O., Frisk, M., Lemieux, S., Marier, P., Rönnqvist, M., 2014: Developing training for industrial wood supply management. International Journal of Forest Engineering 25(2): 101–112. https://doi.org/10.1080/14942119.2014.957527
Ghaffariyan, M.R., 2014: A short review of efficient ground-based harvesting systems for steep and mountainous areas. Bull Transilvania Univ Brasov. 7(2): 11–16.
Haavikko, H., Kärhä, K., Poikela, A., Korvenranta, M., Palander, T., 2022: Fuel consumption, greenhouse gas emissions, and energy efficiency of wood-harvesting operations: A case study of Stora Enso in Finland. Croatian Journal of Forest Engineering 43(1): 79–97. https://doi.org/10.5552/crojfe.2022.1101
Harstela, P., 1993: Forest work science and technology. Silva Carelica 25: 5–8.
Heinrich, R., 1983: Appropriate wood harvesting techniques in mountain forestry in developing countries. Paper presented in IUFRO symposium held in Pakistan.
Erler, J., Bade, C., Bembenek, M., Borz, S.A., Duka, A., Lindroos, O., Lundbäck, M., Magagnotti, N., Mederski, P., Mionetto, M., Simonetti, S., Spinelli, R., Stampfer, K., 2021: https://technodiversity-moodle.ibe.cnr.it/mod/glossary/view.php?id=94 (accessed 10 August 2023)
Lundbäck, M., Häggström, C., Nordfjell, T., 2021: Worldwide trends in methods for harvesting and extracting industrial roundwood. International Journal of Forest Engineering 32(3): 202–215. https://doi.org/10.1080/14942119.2021.1906617
Lüscher, P., Frutig, F., Sciacca, S., Spjevak, S., Thees, O., 2019: Physikalischer Bodenschutz im Wald. 3. Ed. 12 p.
LWF, 2012: Merkbaltt 22 Bodenschutz im Wald. Bayerische Landesanstalt für Wald und Forstwirtschaft, Freising, Germany.
Nordfjell, T., Bacher, M., Eriksson, L., Kadlec, J., Stampfer, K., Suadicani, K., Suwala, M., Talbot, B., 2004: Operational factors influencing the efficiency in conversion. In: Spiecker, H.H., Klimo, J., Skovsgaard, E., Sterba, J.P., Teuffel, H., Von K., editors. Norway spruce conversion: options and consequences. Leiden – Boston: European Forest Institute, 197–223.
Rosińska, M., Bembenek, M., Picchio, R., Karaszewski, Z., Đuka, A., Mederski, P.S., 2022: Determining harvester productivity curves of thinning operations in birch stands of Central Europe. Croatian Journal of Forest Engineering 43(1): 1–12. https://doi.org/10.5552/crojfe.2022.1691
Staaf, K.A.G., Wiksten, N.A., 1984: Tree harvesting techniques. Martinus Nijhoff/Dr W. Junk Publishers, Dordrecht, 371 p.
Staatsbetrieb Sachsenforst, 2006. Holzerntetechnologien. Dresden, Germany, 47 p.
Triplat, M., Krajnc, N., 2021: A System for Quality Assessment of Forestry Contractors. Croatian Journal of Forest Engineering 42(1): 77–90. https://doi.org/10.5552/crojfe.2021.834
Zemánek, T., Fiľo, P., 2022: Influence of intelligent boom control in forwarders on performance of operators. Croatian Journal of Forest Engineering 43(1): 47–64. https://doi.org/10.5552/crojfe.2022.965
© 2023 by the authors. Submitted for possible open access publication under the
terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Authors' addresses:
Prof. Jörn Erler, PhD
e-mail: joern.erler1@tu-dresden.de
Clara Bade, MSc
e-mail: clara.bade@mailbox.tu-dresden.de
Technische Universität Dresden
Faculty of Environmental Sciences
Department of Forest Sciences
Professorship for Forest Technology
Dresdner Straße 37
01737 Tharandt
GERMANY
Assoc. prof. Andreja Đuka, PhD *
e-mail: andreja.duka@sumfak.unizg.hr
Assoc. prof. Ivica Papa, PhD
e-mail: ipapa@sumfak.unizg.hr
University of Zagreb
Faculty of Forestry and Wood Technology
Department of Forestry
Svetošimunska cesta 23
10000, Zagreb
CROATIA
Prof. Stelian Alexandru Borz, PhD
email: stelian.borz@unitbv.ro
Transilvania University of Brasov
Faculty of Silviculture and Forest Engineering
Department of Forest Engineering
Forest Management Planning and Terrestrial Measurements
Sirul Beethoven 1
500123 Brasov
ROMANIA
Ola Lindroos, PhD
e-mail: ola.lindroos@slu.se
Swedish University of Agricultural Sciences
Department of Forests Biomaterials and Technology
Skogsmarksgränd 17
90183, Umeå
SWEDEN
Mikael Lundbäck
e-mail: mikael.lundback@umu.se
Umeå University
Faculty of Science and Technology
Department of Physics
901 87 Umeå
SWEDEN
Prof. Piotr S. Mederski, PhD
e-mail: piotr.mederski@up.poznan.pl
Assist. prof. Mariusz Bembenek, PhD
e-mail: mariusz.bembenek@up.poznan.pl
Poznań University of Life Sciences (PULS)
Faculty of Forestry and Wood Technology
Department of Forest Utilisation
Wojska Polskiego 71A, 60-625 Poznań
POLAND
Nathalie Mionetto
e-mail: nathalie.mionetto@fcba.fr
Technological Institute FCBA
Route de Bonnencontre 60
21170 Charrey-sur-Saône
FRANCE
Natascia Magagnotti, PhD
e-mail: natascia.magagnotti@ibe.cnr.it
Raffaele Spinelli, PhD
e-mail: raffaele.spinelli@ibe.cnr.it
National Research Council of Italy
Via Madonna del Piano 10 - 50019 Sesto Fiorentino (FI)
ITALY
Marco Simonetti
e-mail: marco.simonetti@cnr.it
National Research Council of Italy
Via dei Taurini 19, 00185 Roma
ITALY
Prof. Karl Stampfer, PhD
e-mail: karl.stampfer@boku.ac.at
University of Natural Resources and Life Sciences, Vienna
Department of Forest and Soil Sciences
Institute of Forest Engineering
Peter Jordan Strasse 82
1190, Vienna
AUSTRIA
Niko Pavelić, BSc
e-mail: niko.pavelic5@gmail.com
Ulica bana Tome Erdodyja Bakača 14
10450, Jastrebarsko
CROATIA
* Corresponding author
Received: June 12, 2023
Accepted: May 03, 2024
Original scientific paper