A Procedure to Characterize Wood Pile Inventories at Roadside
doi: https://doi.org/10.5552/crojfe.2025.2409
volume: 46, issue: 1
pp: 11
- Author(s):
-
- Pilote Samuel
- Beaudoin Daniel
- Labelle Eric R.
- Article category:
- Original scientific paper
- Keywords:
- roadside inventory, log traceability, harvester data, GPS positioning, similarity index
Abstract
HTML
Tracking roadside wood inventories is necessary for wood procurement. However, this operation is increasingly problematic due to the costs associated with reaching remote sites, labour shortage, and the methods providing limited information on the characteristics of the logs required for transport planning. To overcome these problems, an automated procedure has been developed in Arcmap to characterize individual wood pile inventories at roadside by using GPS points of forwarders, harvester production files, and the road network shape files. An inventory of the logs in the harvest area followed by a wood pile inventory at the roadside were made to evaluate how the procedure could trace logs from machine operating trail to predicted wood pile locations. The study was done at six harvest blocks in the Saguenay-Lac-Saint-Jean region in the province of Quebec, Canada. The procedure was not able to differentiate individual wood piles and aggregated several piles into predicted unloading areas. Results indicated a similarity index of 72% to manually inventoried wood piles. The similarity index could be explained by the low percentage of inventoried unpredicted wood pile lengths (3%) and a high percentage of overpredicted wood pile lengths (27%). The positive allocation rate could not be assessed at the level of the individual piles. On the other hand, the procedure properly allocated 96% of the logs to unloading areas. With the level of precision obtained, the developed procedure could be beneficial for managing the transportation of wood at the level of the road segment since it provides all the dendrometric data of the logs available for transport without requiring human intervention in the forest.
A Procedure to Characterize Wood Pile Inventories at Roadside
Samuel Pilote, Daniel Beaudoin, Eric R. Labelle
https://doi.org/10.5552/crojfe.2025.2409
Tracking roadside wood inventories is necessary for wood procurement. However, this operation is increasingly problematic due to the costs associated with reaching remote sites, labour shortage, and the methods providing limited information on the characteristics of the logs required for transport planning. To overcome these problems, an automated procedure has been developed in Arcmap to characterize individual wood pile inventories at roadside by using GPS points of forwarders, harvester production files, and the road network shape files. An inventory of the logs in the harvest area followed by a wood pile inventory at the roadside were made to evaluate how the procedure could trace logs from machine operating trail to predicted wood pile locations. The study was done at six harvest blocks in the Saguenay-Lac-Saint-Jean region in the province of Quebec, Canada. The procedure was not able to differentiate individual wood piles and aggregated several piles into predicted unloading areas. Results indicated a similarity index of 72% to manually inventoried wood piles. The similarity index could be explained by the low percentage of inventoried unpredicted wood pile lengths (3%) and a high percentage of overpredicted wood pile lengths (27%). The positive allocation rate could not be assessed at the level of the individual piles. On the other hand, the procedure properly allocated 96% of the logs to unloading areas. With the level of precision obtained, the developed procedure could be beneficial for managing the transportation of wood at the level of the road segment since it provides all the dendrometric data of the logs available for transport without requiring human intervention in the forest.
Keywords: roadside inventory, log traceability, harvester data, GPS positioning, similarity index
1. Introduction
The measurement of wood pile inventories at the roadside is a common and necessary task in forest operations. Within an eastern Canadian context, roadside wood measurement is used to monitor the production of forest entrepreneurs, calculate weekly monetary advances to contractors, allocate wood to processing facilities, and for transportation planning performed at the road segment level. Tracking roadside wood inventories is becoming increasingly complex for forest operations performed in Quebec's public forests due to remote sites and labour shortages.
In Quebec's public forests, the stands are composed of mixed species (Prévost et al. 2003). This heterogeneity often triggers the need for a network of processing facilities to maximize wood utilization. In order to adequately plan the transportation of wood to appropriate mills, it is necessary to characterize roadside wood inventories. However, only scarce information is currently available regarding felled and roadside inventory volumes. Furthermore, errors committed during transport planning can be costly if products are sent erroneously to processing facilities, particularly if the wood transportation capacity is exceeded.
Currently, roadside inventories on public forests are mainly measured with the stacked scaling method (manual sampling-based method) (Gagnon and Gagné 2023) performed by a forest technician or simply by counting the number of forwarder loads. Neither of these methods provide sufficient information on the processed logs (products, species, lengths, average small-end diameters, etc.), which is necessary for adequate transport planning. Furthermore, the expanding and variable distance between harvest sites and wood processing facilities adds pressure to an already strained labour force (time needed for wood pile location and measurement).
Several methods including photogrammetry and laser scanning have been developed to reduce costs and ease the measurement process. For example, Logsize, Trestima Pile and iFovea applications, which rely on cameras of mobile devices, were tested by FPInnovations (Plamondon and McPhee 2017). They revealed differences in log count ranging from –34.9% to 11.3% and from –8.5% to 13.0% for average diameter compared to the official scaling rules of Ontario, Canada. Their results also indicated that these applications require several manipulations, even-faced wood piles, and suitable conditions for photography (absence of snow, branches, and back light). Indeed, tests carried out on the iFovea and Timbeter applications highlighted that the quality of their optical devices and the image processing methods results in a lower performance when used in unfavorable weather conditions (Pachuta 2018). With the two same applications, Moskalik et al. (2022) observed an average error of 1.34% and –1.83% for broadleaf wood pile volume, and –12.82% and 2.41% for coniferous wood pile volume, respectively. Kärhä et al. (2019) tested the Trestima Pile app and reported an average difference in roadside inventory volumes of 4.51% (14.92% SD). By testing iFovea, Berendt et al. (2021) concluded that photo-optical measurements can offer a meaningful solution for log stack gross volume estimation compared to manual measurement methods. LogStackPro (HD Log Systems 2023) is another solution using stereo camera on a mobile device to measure the volume of wood. With this system, Tomczak et al. (2024) recorded a difference in volume of 3.37% compared to manual measurements. According to Tomczak et al. (2024), the use of stereo camera technology is the most promising and accurate solution to replace manual measurement of timber volumes. One solution with higher precision, the Dralle's sScale system, relies on several high-quality cameras mounted on top of a vehicle to measure log piles. This system provides a volume accuracy of ±3% (Dralle 2023), independence from weather conditions, and an ability to operate at night (Pachuta 2018). Marshall (2011) used a terrestrial LiDAR to count the number of logs in a wood pile and reported accuracy greater than 96%. Purfürst et al. (2023) tested a handheld-LiDAR device, iPad LiDAR scanner, and photogrammetric solutions. They concluded that compared to the sScale, the iPad LiDAR scanner underestimated the volume (–6.1% to –3.0% of relative deviations), while the handheld-LiDAR device overestimated the volume (0.1% to 2.1% of relative deviations). Despite certain advantages, LiDAR and sScale devices are expensive and all of the above-mentioned solutions require a vehicle to regularly travel to the various harvest sites to obtain updated inventory. The latter is particularly problematic in our remote and extensive locations when considering an already strained labour force.
Recently, some forest companies in Quebec have started using harvester production files (.hpr or .pri files) to determine the weekly volumes harvested in order to pay advances to their entrepreneurs. These files contain dendrometric information of processed logs. For example, when the harvesting head fells a tree and processes the stem into logs, the on-board computer records the species of the log, which is indicated by the operator, the position, the taper, the length and several other types of information. Since data from on-board computers of forest machinery are standardized according to StanForD or StanForD2010 standards (Möller 2022), forest companies are currently interested in how this data could allow them to increase their efficiency and/or productivity.
These data are a source of reliable and inexpensive information pertaining to the productivity of forest machines (Olivera and Visser 2016). However, proper maintenance is necessary to ensure the quality of this data, which entails daily verifications of harvester measurement accuracy with regular calibration, verification of the measuring equipment for mechanical damage, and keeping the delimbing knives sharp (Strandgard and Walsh 2012). With an adequate standard for the calibration process of harvesting heads, a difference of 0.4% of the on-bark volume of the logs between harvester and laser scanner data obtained at the sawmill was observed by Opferkuch et al. (2017). Harvester production files can therefore provide all the dendrometric information of the logs (diameters (mm), length (cm), volume (m³) and species) necessary for the characterization of the inventories at the roadside with sufficient precision for management scaling. In a conventional two machine cut-to-length system, processed logs are then carried from the stand to the roadside by forwarders. The GPS of a forwarder collects georeferenced points at regular time intervals. By using this geopositioning, it is possible to generate progress surfaces for each harvest site (Cordero et al. 2006). A study on the use of an automatic time-study system analyzing data from GPS points and vibration sensors from forwarders demonstrated the ability to identify individual work cycle elements (Strandgard and Mitchell 2015). Therefore, by combining data from harvester production files and forwarder GPS points, predicting the destination of the logs from the harvest area to individual wood piles at roadside should be possible.
To address the mentioned problems, this study aims to automate the characterization of roadside wood inventories based on data from forest machines. The specific objectives are to:
develop a procedure for processing StanForD .hpr/.pri production files of harvesters and shape files containing the GPS points of forwarders
evaluate the level of precision of the developed procedure, in particular predicted location, length, and content of individual wood piles compared to field inventory.
2. Materials and Methods
2.1 Procedure
Inputs were provided by three file types: harvester production file (.pri or .hpr), GPS points recorded by the forwarder (.shp), and the forest roads (.shp). ArcMap's ModelBuilder (ESRI 2021) application was used to create a model that includes a sequence of geoprocessing tools. Fig. 1 identifies the six steps of the developed model and precedence relationships (data flow) among them.

Fig. 1 Procedure of characterization of wood pile inventory at the roadside
2.1.1 Data Preparation
Shape files (.shp) of forest roads did not require any transformation, while the distance between the road and each GPS points of the forwarder needed to be calculated. Harvester production files (.pri or .hpr) extracted from the harvester on-board computer were read with an executable developed by the FORAC Research Consortium to extract and export log data under an Excel (.xls) format.
2.1.2 Locating Potential Unloading Areas
The concentration of GPS points of the forwarder located along the forest road was used to identify potential unloading areas. The procedure retained only the GPS points located at a distance ≤20 m from a forest road since unloading could occur on or in proximity to a forest road.
A buffer zone of 0.85 m was then created around each of the selected GPS points and the procedure merged all connecting and overlapping buffer zones. A merged buffer zone was considered a potential unloading area whenever it covered ≥20 m² and included at least nine GPS points.
The size of a buffer zone was determined through sensitivity analysis. We retained the value which provided the highest similarity index (section 2.2.2 Eq. 1). The minimum size of a potential unloading area was estimated to be 6.5 m long and 3.1 m wide to consider the GPS receiver positioned on the cabin of the forwarder and the length of the logs being processed.
2.1.3 Identifying Forwarding Cycles
Since the objective of this step was to identify the beginning/end of each cycle and not to precisely study the times relating to each work element, only the following two work elements were considered: loading and unloading.
The forwarder GPS points were sorted in chronological order and used to define line segments between each pair of consecutive GPS points. Each segment was defined by the following attributes: beginning and end GPS points with their respective coordinates, date, and time. For each segment, three additional attributes were obtained by geoprocessing: location (potential unloading area or in the harvest block), length, and travel speed. Together, these three attributes are used to determine the corresponding work element for each segment.
The forwarder was considered to be »Loading« when it was located on the harvest block and was moving at a speed of less than 0.65 m/s. The »Unloading« segments were located in a potential unloading area and had a travel speed of less than 0.35 m/s. Those speeds were determined by observations in the field. All other segments were considered as »Moving« and were ignored.
Each »Loading« and »Unloading« segment was then sorted in chronological order and assigned an incremental cycle number. Essentially, following the chronological list, each time an »Unloading« segment was immediately followed by a »Loading« segment, the latter was assigned the cycle number n+1. A cycle began with a »Loading« segment and ended with an »Unloading« segment.
2.1.4 Identifying Logs Loaded in Each Cycle
GPS coordinates of the processed logs recorded in the harvester production file and the line segments in »Loading« defined previously were used to identify logs loaded in each cycle.
Buffer zones of 10 m on either side of the »Loading« segments were added to delineate the reach of the forwarder boom. These polygons were then overlapped on the GPS points (coordinates) of the logs to assign the corresponding forwarder cycle to each log. Whenever a log overlapped more than one cycle, the procedure assigned it to the first identified cycle. The procedure did not consider the products or the loading capacity of the forwarder.
2.1.5 Identifying Predicted Unloading Wood Pile for Each Cycle
To delineate and number wood piles at the edge of forest roads, the predicted wood pile of each forwarder cycle was determined.
Buffer zones of 10 m on either side of all »Unloading« segments were added to delimit the areas covered by the range of the forwarder boom. The model merged the buffers that were in contact or overlapping in order to constitute predicted wood piles, which were numbered sequentially.
The allocation of a particular predicted wood pile number to each cycle was done by overlapping the polygons in »Unloading« of the cycle with those of the wood piles. A forwarder cycle unloaded into a single wood pile, but a wood pile could receive multiple unloading cycles.
2.1.6 Identifying Logs Unloaded in Each Predicted Wood Pile
For each common forwarder cycle, logs and the predicted unloading wood pile were joined to obtain a list of individual logs by predicted wood pile. An inventory report was generated by combining the output of the procedure (location of wood piles and allocation of logs to piles) and the attributes of the logs contained in the harvester production file (species, length, diameters (small- and large-end), volumes (with and without bark), quality, etc.).
2.2 Evaluation of the Procedure
2.2.1 Site, Operation, and Machinery Descriptions
The study took place in the La Doré sector of the Saguenay-Lac-Saint-Jean region in the province of Quebec, Canada (48.8833 northing; –72.2333 easting). Six harvest blocks from the same harvesting sector were selected for the evaluation of the procedure (Fig. 2). Harvest blocks were located in the fir-white birch forest and were mainly composed of balsam fir (Abies balsamea) accompanied by white birch (Betula papyrifera), black spruce (Picea mariana), jack pine (Pinus banksiana) and trembling aspen (Populus tremuloides). All conifer species had two types of products for a total of six products, which were cut in 5 m logs or, when the diameter was not sufficient (<10 cm at 5 m length), random lengths were produced. All the decidous species were cut in 5 m logs for a total of two products. The logs were sorted and piled by species (five) by the forwarder carrying loads of multiple products. The blocks were harvested using the cut-to-length method (CTL) from mid-July to the end of August 2021 by the same harvesting team using a Tigercat H855E harvester equipped with a Logmax 7000XT harvesting head and a Tigercat 1085B forwarder. The silvicultural treatment was a clear-cut in all the blocks. The secondary transportation of the logs to the different processing facilities was done during the following months.
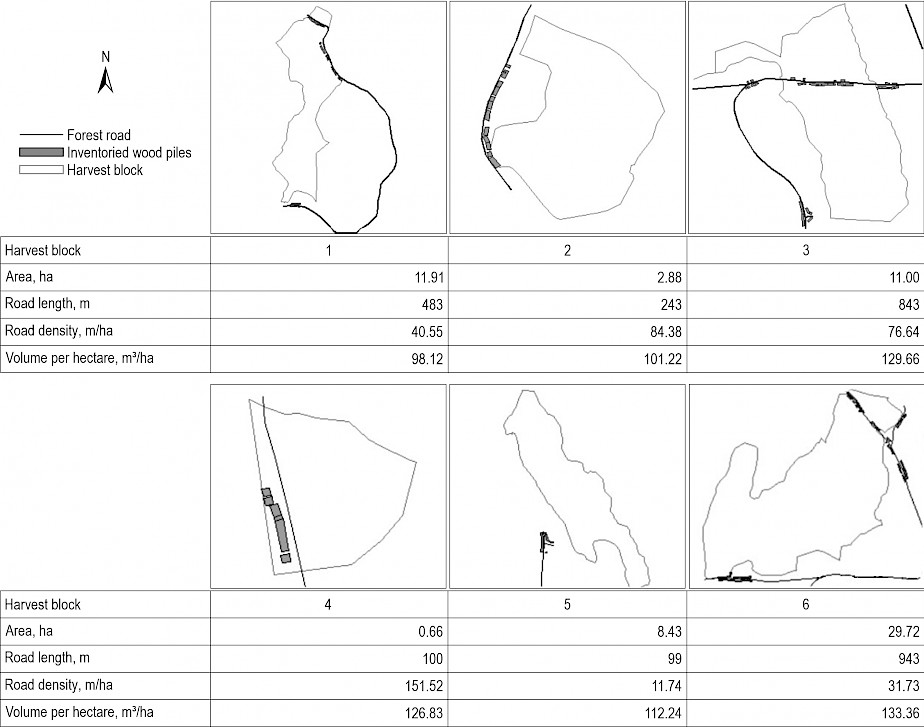
Fig. 2 Harvest blocks and relevant statistics
2.2.2 Evaluation Criteria
The performance of the wood pile characterization procedure was evaluated according to four criteria aimed at assessing the accuracy of the predictions as they pertained to the location and size of individual wood piles and their contents.
The Jaccard similarity index (Jaccard 1912), which quantifies the percentage of overlap (intersect) between two sets, was used to assess location and length of individual wood piles (Eq. 1). In our case, these sets consisted of spatially sensitive linear meters occupied by the inventoried wood piles and the predicted ones along the forest road. The index ranged from 0 to 1. The closer to 1, the more similar the two sets. For instances where a linear meter of two wood piles located on opposite sides of the road overlapped, the length was only counted once. We made this choice because one of the objectives of the inventory is to know the location of the wood piles along the roads (kilometer marker) without necessarily knowing which side they are on.
 (1)
(1)
Where:
J Similarity index contained between 0 and 1
A Set of linear meter occupied by the inventoried wood piles, m
B Set of linear meter occupied by the predicted wood piles, m
The elements of the sets that were not common to the two sets were either linear meters occupied by inventoried wood piles that were not predicted (Eq. 2) or predicted wood piles that did not overlap the inventoried wood piles (Eq. 3).
 (2)
(2)
Where:
RNP(%) Percentage of unpredicted wood pile lengths
 (3)
(3)
Where:
PNR(%) Percentage of overpredicted wood pile lengths
To verify the accuracy of individual wood pile content, Eq. 4 was used to calculate the positive allocation rate, which means the proportion of logs correctly allocated.
 (4)
(4)
Where:
A+ Positive allocation rate, %
X Set of logs inventoried
Y Set of logs assigned to the correct wood piles.
2.3 Data Collection
Assessing the procedure against the four performance criteria required data collection on the harvest blocks and at the roadside. The original production files of the harvester could not be used for the evaluation of the wood pile content criteria since harvesters and their on-board computers do not allow physical log traceability from machine operating trail to a wood pile at roadside. Therefore, through field sampling, we built the equivalent of production files and added unique log identifiers to allow this traceability. Assessing the positive allocation rate (Eq. 4) required comparison of the inventoried allocation of logs to wood piles that occurred during logging operations to those predicted by the procedure.
2.3.1 Inventory at Harvest Blocks
Sampling of logs was done during harvesting operations prior to forwarding. The systematic sampling plan covered all harvest blocks. Plots of 7.5 m in radius were established every 50 m along machine operating trails. In each plot, one log per product (species-length combination) was randomly selected. For each of the 844 logs (table 3), geolocation, species, length and diameters under bark at both ends were tallied. Furthermore, logs were assigned a unique alphanumeric code painted on the cutout at each end of the log. Lengths (cm) and diameters (mm) were measured using a Digitech Tape and the Digitech Professional DPII from Haglöf Sweden, respectively. A Garmin GPSmap 78 GPS was used to collect the logs GPS points.
2.3.2 Inventory at Roadside
Location (GPS point at one end), length in the axis of the forest road (m), product, and the painted alphanumeric identifiers of the logs were collected for each wood pile created during forest harvesting. Lengths were measured using a hip-chain to the nearest decimeter and the same GPS unit was used to georeference the wood piles, now refered as inventoried wood piles.
3. Results
3.1 Location and Size of Wood Piles
Table 1 and Fig. 3 illustrate the performance of the procedure concerning location and size of predicted wood piles. The similarity index ranged from 63% in block 1 to 91% in block 5, with an overall average of 72% for all blocks combined. Dissimilarities between the predicted and inventoried wood piles were mainly due to the overprediction of wood pile lengths. Indeed, the percentage of overpredicted wood pile length ranged from 9% in block 5 to 36% in block 6 for an overall average of 27%. The procedure did not identify all inventoried wood piles in block 1 (block 1C), thus resulting in a percentage of unpredicted wood pile length of 15%.
Table 1 Performance regarding location and size of predicted wood piles
|
Criteria |
Harvest blocks |
|||||
|
1 |
2 |
3 |
4 |
5 |
6 |
|
|
Similarity Index |
63% |
69% |
71% |
75% |
91% |
64% |
|
Percentage of unpredicted wood pile length |
15% |
0% |
0% |
0% |
0% |
0% |
|
Percentage of overpredicted wood pile length |
30% |
31% |
29% |
25% |
9% |
36% |
|
Linear meter of inventoried wood piles, A |
226 |
103 |
295 |
46 |
93 |
466 |
|
Linear meter of predicted wood piles, B |
340 |
149 |
417 |
96 |
102 |
730 |
|
Linear meter of inventoried and predicted wood piles (A∩B) |
193 |
103 |
295 |
46 |
93 |
466 |

Fig. 3 Predicted wood piles compared with inventoried wood piles for six harvest blocks
Fig. 3 shows that the procedure was not able to differentiate individual wood piles. Instead, it proceeded to an aggregation of several piles into a shared predicted pile, hereafter referred to as predicted unloading area. Furthermore, a predicted unloading area was composed of at least one pile per product assigned to it since each product was piled separately.
For half of the blocks (blocks 2, 4, and 5), the procedure aggregated the piles into a single predicted unloading area for each block. Considering the products unloaded in these areas, the procedure predicted five wood piles for blocks 2 and 4, while three wood piles were predicted for block 5. Only four wood piles inventoried were not predicted, all of which were associated with harvest block 1.
Table 2 Descriptive statistics on the number of wood piles and unloading areas
|
Harvest blocks |
||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
|
|
Number of inventoried wood piles |
25 |
13 |
33 |
6 |
4 |
47 |
|
Number of predicted unloading areas |
5 |
1 |
4 |
1 |
1 |
4 |
|
Number of predicted wood piles |
20 |
5 |
20 |
5 |
3 |
20 |
|
Number of unpredicted inventoried wood piles |
4 |
0 |
0 |
0 |
0 |
0 |
The blocks 1, 3 and 6 had more than one predicted unloading area. For the most part, the procedure assigned a different unloading area when consecutive wood piles were separated by more than 30 m (Fig. 4 presented on a semi-logarithmic scale). The only two exceptions were observed for harvest block 6.

Fig. 4 Distance between consecutive inventoried wood piles belonging to the same or different unloading areas
3.2 Content of Wood Piles
Not all the logs with a unique identifier were found in the inventoried wood piles (Table 3). The missing marked logs may have been buried in the ground under the wood piles as stabilizers in the road ditch or forgotten in the forest during logging operations. The percentage of correctly allocated logs to predicted unloading areas was therefore established using only the marked logs found.
Log allocation to the correct unloading area ranged from 85% (harvest block 3) to 100% (harvest blocks 2, 4 and 5), with an average of 96% (Table 3). However, excluding harvest blocks with a single unloading area, the percentage of correctly allocated logs varied from 85% (block 3) to 96% (block 6) with an average of 92%.
Incorrectly allocated logs are those found in an inventoried wood pile that was not part of the predicted unloading zone.
Table 3 Performance of the procedure regarding the content of wood piles
|
Criteria |
Harvest block |
|||||
|
1 |
2 |
3 |
4 |
5 |
6 |
|
|
Percentage of correctly allocated logs |
94% |
100% |
85% |
100% |
100% |
96% |
|
Logs with unique identifier |
83 |
31 |
131 |
13 |
41 |
545 |
|
Logs found in the inventoried wood piles |
51 |
29 |
97 |
12 |
40 |
490 |
|
Logs correctly allocated |
48 |
29 |
83 |
12 |
40 |
470 |
|
Logs wrongfully allocated |
3 |
0 |
14 |
0 |
0 |
20 |
4. Discussion
4.1 Accuracy of the Procedure
The procedure identified the location of unloading areas rather than individual wood piles. Through GPS coordinates, it associated loaded logs with each forwarder cycle. The forwarder log bunk, which could consist of multiple products, was unloaded at a single unloading area. Even if the allocation of the logs to these aggregated wood piles was adequate, it was impossible to precisely locate the different products within the predicted unloading areas. The two exceptions observed at harvest block 6 (Fig. 4), for the distance greater than 30 m between inventoried wood piles being in the same unloading area, can be explained by the presence of the primary machine operating trail, fuel tanks, and service truck. In these three situations, the concentration of GPS points was increased, which the procedure interpreted as a continuation of the unloading area.
Aside from harvest block 1, the procedure was able to adequately predict unloading areas containing all inventoried wood piles. Unpredicted wood piles from harvest block 1 consisted of a limited number of logs and were located further away from the forest road, thus not providing sufficient GPS points within the 20 m buffer for the procedure to detect an unloading area. The inability of the procedure to differentiate adjacent wood piles can be explained by the level of precision of the used GPS unit (2 m), its data acquisition frequency, and the adequate identification of unloading segments. It grouped several inventoried wood piles of different species in the same area instead of separating them, which explains the large quantity of overpredicted length and reduces the similarity index. Although the majority of harvested blocks had a similarity index ranging from 63% to 75%, harvest block 5 had a higher similarity index of 91%. The improved performance of this block could be explained by the restricted space to pile the wood (low road density and spatial extent of harvest block), thus limiting the likelyhood of overprediction (Fig. 2).
The procedure allocated 96% of the logs to the correct unloading areas proving its capability to predict the destination of individual logs from the harvest block to their specific unloading areas. All logs were correctly allocated in harvest blocks 2, 4, and 5 because the procedure aggregated all inventoried wood piles into a single predicted unloading area. For these harvest blocks, the procedure presented limited benefits compared to simply using production files of the harvester (Fig. 3). Incorrect log allocations were recorded in harvest blocks 1, 3, and 6 either because of unpredicted inventoried wood piles or incorrectly assigned forwarder cycle. We were unable to evaluate the allocation of logs to individual wood piles. It is likely that the positive allocation rate to individual wood piles is lower than that reported here.
4.2 Advantages of the Developed Procedure
Previous studies aimed at acquiring knowledge of roadside wood inventories that have used photogrammetry and LiDAR (Knyaz and Maksimov 2014, Herbon et al. 2015, Pásztory and Polgár 2016, Kruglov and Chiryshev 2017, Artem and Shishko 2018, Kärhä et al. 2019, Cremer et al. 2020, Borz et al. 2022, Borz and Proto 2022, Casas et al. 2023). Those solutions require suitable weather conditions and/or assume that all logs are visible during data acquisition, which is not always the case. In fact, some logs may be obscured during forest operations (burial, blockage by vegetation or logging debris, etc.), a situation that is not problematic for our procedure, but poses issues with photogrammetric solutions. Furthermore, most of the photogrammetric solutions require the user to indicate average log length in order to calculate wood pile volume (Plamondon and McPhee 2017), a task that is not required for our procedure since it considers actual log dimensions through the use of the harvesters production files. Photogrammetric and LiDAR methods require physical visits to each wood pile to gather information, which is more feasible in European context due to higher forest road density and closer proximity of the harvest blocks. However, the long distances between harvesting sites coupled with labour shortage issues make these solutions less appealing in North American conditions. The procedure developed identifies the location of unloading areas and the allocation of logs from harvester production files without the need of physical visits to the harvest blocks, since all the data of the machinery can be transferred over a cellular network where it is available, with an internet connection such as Starlink (Tanguay-Laflèche 2023) or by automatic data-muling with the operator's cellphone (Park and Heidemann 2011). Lastly, contrary to photogrammetric and LiDAR methods, the current procedure could be completely automated through periodic data transfer.
RFID tags can also be used to trace logs from the harvest site to roadside wood piles. Picchi et al. (2015) noticed a survival rate of 98% of the RFID tags during the harvest operations and handling. The disadvantages of the RFID tags are that the unit cost of the tags is not always justified in the case of low value logs and disposable tags may lack acceptability by sawmills (Picchi et al. 2022) because the tags contaminate the residue (Keefe et al. 2022). Our procedure is low cost and non-intrusive in the sawmill operation.
4.3 Improvement Possibilities
For precision forestry, which requires the use of technology to get as much real information as it is possible to improve decision-making process (Kovácsová and Antalová 2010), several improvements could be considered to locate individual wood piles, identify the corresponding product, and more precisely characterize the loads of each forwarder cycle. Most of the foreseen improvements are linked to the forwarder for a refinement of the method of the procedure.
The use of a more accurate GPS unit and an increase in data acquisition frequency would provide a more accurate delination of loading and unloading segments for the forwarder. Since forwarder load content for each cycle was predicted by overlapping loading segments (polygons) on GPS coordinates of logs, more accurate loading segments should translate into more accurate load content. Similarily, predicted wood pile locations and content were determined by overlapping unloading segments (polygons) with potential unloading areas previously defined from forwarder GPS points density. Thus, more accurate unloading segments should lead to more accurate predicted wood pile location and length, and potentially greater ability to detect individual wood piles.
Forwarder production files could improve wood pile content and location of wood piles. Indeed, the forwarder on-board computer produces the ».fpr« files of the StanForD2010 standard (Arlinger et al. 2020) containing the information on the loading time, unloading time, loaded products, etc. This information would provide greater detail of each forwarder cycle (content and location). However, it would require additional work for the forwarder operator to indicate these work elements. The use of cameras on the forwarder for load measurement (Nuhlíček et al. 2020) and artificial intelligence for the recognition of species (Carpentier et al. 2018), log grading and quality (Cui et al. 2023), etc. could alleviate some of the added tasks.
The addition of a wireless hydraulic pressure sensor in the forwarder boom hydraulic circuit could help to determine when the boom is operating. This could remove false positives and refine log pile positions. The use of kinematics equations of the hydraulic boom equiped with linear and rotation encoders on articulation points (Zheng et al. 2015) would allow recording GPS coordonates to better reflect grapple position while loading and unloading. This could improve log bunk content characterization and the identification of individual log piles at roadside. Lindroos et al. (2015) described several possible methods of following the movements of the boom, such as the combined use of accelerometers, gyroscopes and magnetometer to calculate the inertia of the boom.
5. Conclusions
Using the harvester production file, the forwarder GPS points and forest roads, the developed procedure characterized roadside wood inventories by identifying unloading areas and their content (number of logs, species, volume, diameter, and length). The procedure would be beneficial for managing the transportation of wood at the level of the road segment since it allows logs to be traced from the harvest block to roadside unloading areas at a low cost and without human intervention in the forest. Even though the study took place in eastern Canada, the procedure could be used in other regions using the CTL method but its performance should be investigated to consider specific operational context. Some improvements could be added to identify the individual wood pile and improve the method of characterization of the log bunk content by the use of the forwarder production files and the forwarder boom movement. In its current state, a forest company could use the procedure to follow the progression of harvesting operations and its inventories of roadside wood, while limiting human intervention in the forest.
Acknowledgments
This work was supported by the Natural Sciences and Engineering Research Council of Canada under Grant 533968-18 and by the FORAC Research Consortium and its partners.
6. References
Arlinger, J., Möller, J., Sorsa, J.-A., Räsänen, T., 2020: Introduction to StanForD 2010. Skogforsk, 16 p.
Artem, K., Shishko, E., 2018: Log pile measurement through 3D modeling. Yekaterinburg, Russia: 40th International Conference on Telecommunications and Signal Processing (TSP): 263–266.
Berendt, F., Wolfgramm, F., Cremer, T., 2021: Reliability of photo-optical measurements of log stack gross volume. Silva Fennica 55(3): article id 10555. https://doi.org/10.14214/sf.10555
Borz, S.A., Morocho Toaza, J.M., Forkuo, G.O., Marcu, M.V., 2022: Potential of Measure App in Estimating Log Biometrics: A Comparison with Conventional Log Measurement. Forests 13(7): 1028. https://doi.org/10.3390/f13071028
Borz, S.A., Proto, A.R., 2022: Application and accuracy of smart technologies for measurements of roundwood: Evaluation of time consumption and efficiency. Computers and Electronics in Agriculture 197: 106990. https://doi.org/10.1016/j.compag.2022.106990
Carpentier, M., Giguère, P., Gaudreault, J., 2018: Tree Species Identification from Bark Images Using Convolutional Neural Networks. International Conference on Intelligent Robots and Systems (IROS), 1075–1081. https://doi.org/10.48550/arXiv.1803.00949
Casas, G.G., Ismail, Z.H., Limeira, M.M.C., da Silva, A.A.L., Leite, H.G., 2023: Automatic Detection and Counting of Stacked Eucalypt Timber Using the YOLOv8 Model. Forests 14(12): 2369. https://doi.org/10.3390/f14122369
Cordero, R., Mardones, O., Marticorena, M., 2006: Evaluation of forestry machinery performance in harvesting operations using GPS technology. In Proceedings of the 5th International Precision Forestry Symposium, March 14–16, Sun City, South Africa, 163–173 p.
Cremer, T., Berendt, F., de Miguel Diez, F., Wolfgramm, F., Blasko, L., 2020: Accuracy of Photo-Optical Measurement of Wood Piles. Environmental Sciences Proceedings 3(1): 90. https://doi.org/10.3390/IECF2020-08192
Cui, Y., Lu, S., Liu, S., 2023: Real-time detection of wood defects based on SPP-improved YOLO algorithm. Multimedia Tools and Applications 82(14): 21031–21044. https://doi.org/10.1007/s11042-023-14588-7
Dralle, 2023: sScale. Dralle. https://www.dralle.dk/sscale
ESRI, 2021: What is ModelBuilder?. https://desktop.arcgis.com/en/arcmap/latest/analyze/modelbuilder/what-is-modelbuilder.htm
Gagnon, Y., Gagné, M., 2023: Wood scaling by apparent volume with factor using rectangular samples. Le Monde En Images Des Collections Pour l'éducation.
HD Log Systems, 2023: LogStackPRO – fast, easy and reliable photo measurements of raw wood stacks.
Herbon, C., Otte, B., Tönnies, K.-D., Stock, B., 2015: Mobile 3D Wood Pile Surveying. 14th IAPR International Conference on Machine Vision Applications. Tokyo, Japan. 422–425. https://doi.org/10.1109/MVA.2015.7153101
Jaccard, P., 1912: The distribution of the flora in the alpine zone. New Phytologist 11(2): 37–50. https://doi.org/10.1111/j.1469-8137.1912.tb05611.x
Kärhä, K., Nurmela, S., Karvonen, H., Kivinen, V.-P., Melkas, T., Nieminen, M., 2019: Estimating the accuracy and time consumption of a mobile machine vision application in measuring timber stacks. Computers and Electronics in Agriculture 158: 167–182. https://doi.org/10.1016/j.compag.2019.01.040
Keefe, R.F., Zimbelman, E.G., Picchi, G., 2022: Use of Individual Tree and Product Level Data to Improve Operational Forestry. Current Forestry Reports 8: 148–165. https://doi.org/10.1007/s40725-022-00160-3
Knyaz, V.A., Maksimov, A.A., 2014: Photogrammetric technique for timber stack volume control. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci., XL-3: 157–162. https://doi.org/10.5194/isprsarchives-XL-3-157-2014
Kovácsová, P., Antalová, M., 2010: Precision forestry – definition and technologies. Šumarski List. 134(11–12): 603–610.
Kruglov, A., Chiryshev, Y., 2017: The Image Analysis Algorithm for the Log Pile Photogrammetry Measurement. WSEAS Transactions on Signal Processing 13: 135–145.
Lindroos, O., Ringdahl, O., La Hera, P., Hohnloser, P., Hellström, T.H., 2015: Estimating the Position of the Harvester Head – a Key Step towards the Precision Forestry of the Future?. Croatian Journal of Forest Engineering 36(2): 147–164.
Marshall, H., 2011: Automated Log Counting: Proof of Concept Algorithm. Proceedings of SilviLaser 2011, 11th International Conference on LiDAR Applications for Assessing Forest Ecosystems, Tasmania, Australia. 16-20 October, 1–13 p.
Möller, J., 2022: StanForD. Skogforsk. https://www.skogforsk.se/english/projects/stanford/
Moskalik, T., Tymendorf, L., van der Saar, J., Trzcinski, G., 2022: Methods of wood volume determining and its implications for forest transport. Sensors 22(16): 6028. https:// doi.org/10.3390/s22166028
Nuhlíček, O., Slavík, M., Dvořák, J., 2020: 2D photogrammetry as a forwarder load measurement technique. Forests 11(9): 962. https://doi.org/10.3390/f11090962
Olivera, A., Visser, R., 2016: Using the harvester on-board computer capability to move towards precision forestry. New Zealand Journal of Forestry 60(4): 3–7.
Opferkuch, M., Jaeger, D., Wagner, T., 2014: Improved wood delivery by new scaling methods of log piles. Proceedings of the 5th Forest Engineering Conference together with the 47th International Symposium on Forestry Mechanisation, Gerardmer, France.
Pachuta, A., Chojnacki, J., 2018: Photo-optical measurement of wood in a stack. Technika rolnicza ogrodnicza lesna.
Park, U., Heidemann, J., 2011: Data muling with mobile phones for sensornets. In Proceedings of the 9th ACM Conference on Embedded Networked Sensor Systems, 162-175 p.
Pásztory, Z., Polgár, R., 2016: Photo Analytical Method for Solid Wood Content Determination of Wood Stacks. Journal of Advanced Agricultural Technologies 3(1): 54–57. https://doi.org/10.18178/joaat.3.1.54-57
Picchi, G., Kühmaier, M., Marques, J. de D.D., 2015: Survival Test of RFID UHF Tags in Timber Harvesting Operations. Croatian Journal of Forest Engineering 36(2): 165–174.
Picchi, G., Sandak, J., Gricolato, S., Panzacchi, P., Tognetti, R., 2022: Smart Harvest Operations and Timber Processing for Improved Forest Management. Climate-Smart Forestry in Mountain Regions. Managing Forest Ecosystems 40: 317–359. https://doi.org/10.1007/978-3-030-80767-2_9
Plamondon, J., McPhee, B., 2017: Are applications for mobile devices a solution to automate conventional measuring?. FPInnovation, Rapport Technique No. 10, 1–17 p.
Prévost, M., Roy, V., Raymond, P., 2003: Research note 125: Silviculture and regeneration of mixed forests in Quebec (Canada): An approach that respects the natural dynamics of stands. Ministère de la Forêt, de la Faune et des Parcs, Direction de la recherche forestière.
Purfürst, T., De Miguel-Dìez, F., Berendt, F., Engler, B., Cremer, T., 2023: Comparison of wood stack volume determination between manual, photo-optical, iPad-LiDAR and handheld-LiDAR based measurement methods. iForest 16(4): 243–252. https://doi.org/10.3832/ifor4153-016
Strandgard, M., Mitchell, R., 2015: Automated time study of forwarders using GPS and a vibration sensor. Croatian Journal of Forest Engineering 36(2): 175–184.
Strandgard, M., Walsh, D., 2012: Maintaining harvester measurement accuracy to maximise value recovery. CRC for Forestry, Bulletin 28: 1–3.
Tanguay-Laflèche, M., 2023: Internet in operation for forest entrepreneurs. Carrefour Forêt 2023.
Tomczak, K., Mederski, P.S., Naskrent, B., Tomczak, A., 2024: Accuracy of Photo-Optical Timber Measurement Using a Stereo Camera Technology. Croatian Journal of Forest Engineering 45(1): 157–167. https://doi.org/10.5552/crojfe.2024.2268
Zheng, Y., Ge, T., Liu, J., 2015: Kinematics modeling and control simulation for a logging harvester in virtual environments. Advances in Mechanical Engineering 7(10): 1687814015611329. https://doi.org/10.1177/1687814015611329
© 2024 by the authors. Submitted for possible open access publication under the
terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Authors' addresses:
Samuel Pilote, MSc *
e-mail: samuel.pilote.1@ulaval.ca
Prof. Daniel Beaudoin, PhD *
e-mail: daniel.beaudoin@sbf.ulaval.ca
Prof. Eric R. Labelle, PhD
e-mail: eric.labelle@sbf.ulaval.ca
Laval University
Faculty of Forestry, Geography and Geomatics
Department of Wood and Forest Sciences
Pavillon Abitibi-Price, 2405, rue de la Terrasse
G1V 0A6, Quebec City
CANADA
* Corresponding authors
Received: July 15, 2023
Accepted: February 03, 2024
Original scientific paper