Design of a Planting Module for an Automatic Device for Forest Regeneration
doi: 10.5552/crojfe.2023.1722
volume: 44, issue:
pp: 14
- Author(s):
-
- Tylek Paweł
- Szewczyk Grzegorz
- Kormanek Mariusz
- Walczyk Józef
- Sowa Janusz Michal
- Pietrzykowski Marcin
- Woś Bartłomiej
- Kiełbasa Paweł
- Juliszewski Tadeusz
- Tadeusiewicz Ryszard
- Adamczyk Florian
- Danielak Marek
- Wojciechowski Jacek
- Szczepaniak Jan
- Szychta Marek
- Szulc Tomasz
- Article category:
- Original scientific paper
- Keywords:
- container seedlings, planter, forest regeneration, autonomous work, precision forestry
Abstract
HTML
Forest regeneration by means of seedlings grown in container nurseries is usually performed manually with the use of the standard dibble bar or the tube dibble. Manual placement of a large number of seedlings in the soil requires a lot of work. Manual removal of the soil cover and digging the soil in spots with a diameter of 0.4 m requires, under average conditions, about 38 man-hours/ha, while planting with a dibble bar requires about 34 man-hours/ha. Additional work time is needed to carry seedlings over an area that is being afforested. At present, forestry does not have automatic planters that would enable the establishment of forest cultures. The aim of the paper is to present the concept of an autonomous robot and an innovative technology of performing forest regeneration and afforestation of former agricultural and reclaimed areas. The paper also presents the design solutions of the key working unit, which is a universal, openable dibble, cooperating with a three-toothed shaft to prepare a planting spot. The solution proposed enables continuous operation of the machine, i.e. without the need to stop the base vehicle.
Design of a Planting Module for an Automatic Device for Forest Regeneration
Paweł Tylek, Grzegorz Szewczyk, Mariusz Kormanek, Józef Walczyk, Janusz M. Sowa, Marcin Pietrzykowski, Bartłomiej Woś, Paweł Kiełbasa, Tadeusz Juliszewski, Ryszard Tadeusiewicz, Florian Adamczyk, Marek Danielak, Jacek Wojciechowski, Jan Szczepaniak, Marek Szychta, Tomasz Szulc
Abstract
Forest regeneration by means of seedlings grown in container nurseries is usually performed manually with the use of the standard dibble bar or the tube dibble. Manual placement of a large number of seedlings in the soil requires a lot of work. Manual removal of the soil cover and digging the soil in spots with a diameter of 0.4 m requires, under average conditions, about 38 man-hours/ha, while planting with a dibble bar requires about 34 man-hours/ha. Additional work time is needed to carry seedlings over an area that is being afforested. At present, forestry does not have automatic planters that would enable the establishment of forest cultures. The aim of the paper is to present the concept of an autonomous robot and an innovative technology of performing forest regeneration and afforestation of former agricultural and reclaimed areas. The paper also presents the design solutions of the key working unit, which is a universal, openable dibble, cooperating with a three-toothed shaft to prepare a planting spot. The solution proposed enables continuous operation of the machine, i.e. without the need to stop the base vehicle.
Keywords: container seedlings, planter, forest regeneration, autonomous work, precision forestry
1. Introduction
The technological evolution that began in the new millennium has integrated mechanical development with the applications of electronics. The cooperation of mechatronic systems with information technologies is widely described as Industry 4.0. The participation of modern systems in the field of sustainable forest management is becoming increasingly noticeable, and includes economic, environmental and social aspects. It ensures the safety of forest workers, supports environmental sustainability and guarantees a high level of productivity. Current challenges are related to the need to increase the level of automation of forestry machines, the implementation of remote-control or unmanned vehicles, and the pursuit to implement the assumptions of precision forestry (Lindroos et al. 2015, Picchio et al. 2019). It should be noted that this calls for interdisciplinarity in the approach to project implementation and cooperation in many areas, such as agricultural and forest engineering, computer science, mechatronics, dynamic control, machine learning, etc. (Shamshiri et al. 2018, Talbot and Astrup 2021).
Manual work in forest management, including planting, is characterised by a very high level of energy expenditure (Grzywiński 2005), which is disproportionately high in relation to the other components of the physical load, i.e. static effort and monotypic nature of the work. The amount of energy expended during a shift places manual planting in the group of hard and very hard labour (Grzywiński 2007). The factor which lowers the fatigue level is the distribution and length of breaks during work (Gallis 2013). For this reason, the utilisation rate of the shift working time is low, approx. 70% (Sabo and Poršinsky 2005, Horvat et al. 2007). On the other hand, machine technologies, including automated and robotic ones, are characterised by high productivity, which is a derivative not only of high efficiency but also of a lower share of break time (Ghaffarian 2009). However, it should be remembered that forest work is carried out in terrain with unfavourable traction conditions, large inclinations, a high share of obstacles with varied density of occurrence and geometric parameters. Such conditions expose machine operators to additional stress and reduce productivity (Szewczyk 2020). For example reclaimed areas, e.g. former mining ones, are characterised by a large diversity and variable relief (Bell and Donnelly 2006). These factors contribute to the varying degree of difficulty of land reclamation and to the frequently hindered access to the terrain for the technological means of afforestation.
In the last decade, a number of forestry jobs, especially those related to seeds, nurseries and timber harvesting, have been automated. In jobs related to seeds and nurseries, a breakthrough came as a result of the development and popularisation of image recognition and analysis systems, which made it possible to implement new technologies and automatic devices for seed processing (Novikov et al. 2019, Tadeusiewicz et al. 2017, Tylek et al. 2020a, 2021b). Progress in developing new nursery technologies is also important (Dornyak and Novikov 2019, Sokolov and Novikov 2019). In timber harvesting, the development of technology is aimed at introducing remotely controlled machines or fully robotic systems, initially intended for timber harvesting and extraction on plantations (Visser and Obi 2021). They are to minimise the negative impact of harvesting on the environment without reducing labour productivity (Cambi 2016).
The weakest technological progress concerns afforestation and forest breeding tasks. Planting a large number of seedlings is highly labour-intensive with ergonomic consequences for the worker. Monotony and a significant proportion of static loads during work make it more challenging for the workers. In addition, due to fatigue caused by the work, it is sometimes performed carelessly. This may result in a decrease in the survival rate of seedlings, due to permanent deformation of their root systems. This in turn lowers their resistance to environmental stresses, pests and diseases (Szyguła et al. 2012).
For the above reasons, it was undertaken to design an autonomous, mobile platform equipped with a planting unit, with the possibility of future expansion of the system with other tools. This paper presents a bibliography study on the current attempts to automate forest regeneration tasks, and describes the design and functional model of the new planting module.
2. Methods of Forest Regeneration Mechanisation and Automation
Planting, especially in forest, former agricultural land and reclaimed post-mining areas, is usually done manually. Devices applied include various types of dibble bars: classic ones that cut into the soil a small hole in the shape of the seedling root ball (Fig. 1a) or tube dibbles that push the soil to the sides before inserting a seedling (Fig. 1b). In such cases, containers with seedlings must be carried by workers. A worker can plant about 150 seedlings per working hour.

Fig. 1 Dibbles used for seedlings with root balls
In the last decade, attempts have been made to use classic planters for bare-root seedlings on a larger scale. In this case, full-area soil preparation is necessary, usually with the use of energy-consuming ploughing (Laine 2017, Więsik and Aniszewska 2011). Moreover, this requires the cooperation of the tractor driver with one or two helpers (Fig. 2). The above technology entails the need to make manual corrections, because when working in terrain that has not been cleared or is highly uneven, workers fail to properly place some of the seedlings in the soil (Fig. 3a, b). The advantage, as compared to manual planting, is good compaction of the seedlings, which promotes the growth of roots from the root ball into undisturbed soil and reduces the risk of seedling overdrying.

Fig. 2 Attempt to use a single-row planter for bare-root seedlings for forest regeneration
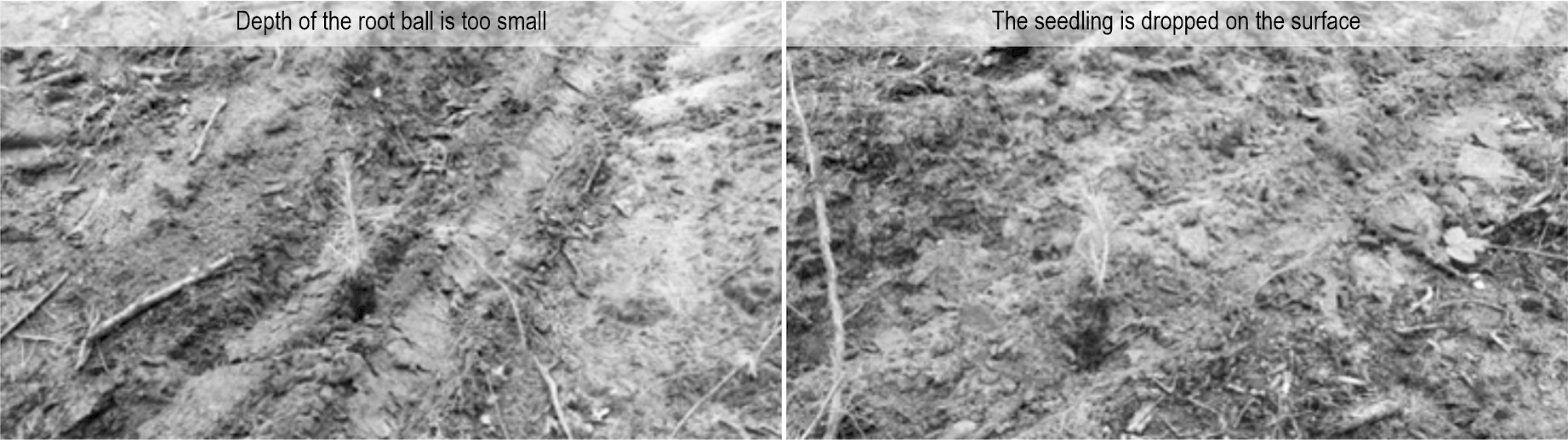
Fig. 3 Examples of planting errors caused by planter's operation in an area that is not cleared, in need of correction
A functional solution used occasionally (especially in Scandinavia) is a semi-automatic planting head (Fig. 4), suspended on the boom of an excavator or a harvester. However, automation is not full here because the seedlings are taken out of the containers and placed in the planter's storage unit manually (Ersson 2014 and Laine 2017, Więsik and Aniszewska 2011).

Fig. 4 Planting head mounted on boom of a caterpillar-tracked vehicle (www.brackeforest.com)
Depending on the option applied, the planting capacity is 140–350 seedlings per hour, but their economic viability is questionable as the relatively small, compact device is mounted on high-power multi-ton work vehicles. The head prepares the planting spot in the form of a small mound, and the possibility of planting is usually limited to small-sized pine seedlings. A standard storage unit can accommodate several dozen seedlings at a time, so additional seedling storage units are built on the base vehicle. The head may be extended with a feeder carousel tray, which increases the capacity of the storage unit and lowers the loading time by 57% (Ersson et al. 2014). However, seedlings are exposed to drying and mechanical damage because the tray is moved together with the planting unit, which has a percussion mechanism.
A slightly similar concept has been proposed by the Japanese (Tylek et al. 2020b), but the base vehicle is a micro-tractor with a caterpillar-traction system (Fig. 5). The head of the semi-automatic device is mounted on the boom. In the first operating phase, the head prepares a planting spot with the use of two blade cutters with vertical rotation axes moving in opposite directions. Next, a seedling is placed in the soil using a tube dibble. The third phase consists in compacting the soil around the seedling with a pneumatically pressed stamp. The disadvantage of this solution is the need to manually feed the seedlings. This is done by the operator by placing the seedlings in a collector mounted inside the cabin. The transport of seedlings to the planting mechanism is pneumatically assisted.

Fig. 5 Micro-excavator with a mounted planting head; on cab roof there are visible elements of pneumatic system for supporting seedlings transport from collector to planting mechanism
At the University of Victoria in Canada, a model of a remotely controlled mini planting machine called TreeRover (https://www.uvic.ca/news/topics/2016+building-a-tree-planting-robot+ring) has been developed. This device has an electric drive of the undercarriage, while the working tools are pneumatic.This automatic device can only move on flat terrain. Planting takes place without preparation of the ground, using a tubular type of dibble with a square cross-section. Moreover, the planting head has a stamp to press down the seedling root ball. In the prototype (Fig. 6), the device storage unit can accommodate only 10 seedlings, which fall down from the unit by gravity, and the time of a single planting cycle is approximately 15 sec.

Fig. 6 Model of a remote-controlled forest planting automatic device
Another innovative proposal is a forest planting robot with legged traction system (Fig. 7). However, this project has not gone beyond the concept phase, and the proposed traction system in the form of four supports, previously used as a platform for mounting multi-operational timber harvesting machines, has not met the foresters’ expectations yet. It is characterised by exceptional complication of the trajectory of supports, an extensive control system and greater (compared to wheel systems) motion resistance (Visser and Obi 2021). The storage unit holds 320 seedlings and requires manual loading. The seedlings are placed in the soil together with their biodegradable pots.

Fig. 7 Visualisation of a forest planting robot with a legged traction system (Johnston et al. 2016)
3. Construction Assumptions for Autonomous Planter
The above-mentioned advantages do not apply to an automatic device for forest regeneration and afforestation in lands previously used for agricultural purposes and reclaimed areas, with the working name RoboFoR. The project is the outcome of research and development carried out by the scientific-industrial consortium led by the University of Agriculture in Krakow, and the following subcontractors: the AGH University of Science and Technology in Krakow, the Łukasiewicz Research Network-Industrial Institute of Agricultural Engineering in Poznań and the Forest Technology Centre in Jarocin, which are extremely interested in commercialising the solution.
According to the assumptions, the machine will be based on a self-levelling, 4-wheel traction system, controlled with the assistance of the satellite navigation system, which will enable autonomous navigation in the terrain not previously cleared and the selection of a planting spot. It will be equipped with a mechanism to prepare a planting spot and an integrated planting unit. Seedlings will be picked directly from their containers and moved to the planting unit using the boom, operating according to an algorithmic procedure. The machine will have a unit to store seedling containers with an automatic exchange of the emptied containers. Its drive will be a compact internal combustion-hydraulic assembly with an electrohydraulic control system. The device will be equipped with an industrial measuring and control module and a wireless remote control system (Adamczyk et.al. 2019).
Seedlings grown in container nurseries will be planted automatically without the need to remove them first, which would cause harmful overdrying and shedding of some of the soil. The autonomous robot will be equipped with its own drive system enabling it to work under difficult field conditions as well as a mechanism that will eliminate competitive vegetation around the planting site (planting spot) and loosen the soil at the spot where the planting element is working. It will also have a set to compact the soil around the seedling to stabilise it and eliminate air pockets that prevent the growth of the root system into the surrounding soil. As opposed to other systems, the planting spot will be prepared without having to stop the machine’s forward movement (Ersson et al. 2014). The seedlings for the dibble (the planting device) will be fed by an intelligent robot arm which will take the seedlings out of the containers according to a specific algorithm. Then the dibble will be pulled out and the seedling will be pressed down with the force regulated by the mechanism pressing the soil around it.
The planting robot will store containers with seedlings in its own storage unit, moved in a programmed manner to replace an emptied container with another, full one. This will allow for planting a given afforestation area without the need to manually feed seedlings, and without supervision. The robot will move around the operation area with the help of navigation systems or with the operator's support, avoiding terrain obstacles. During the work, vehicle paths and the geographic coordinates of seedling distribution will be recorded. The recorded data will allow the development of a map of the afforested area for further control of the development of forest cultivation during vegetation. In the future, with the use of vision control system, it will be possible to use such maps to automate further forest breeding treatments (tree maintenance and thinning), and even to harvest timber with the use of automatically controlled harvesters. Planting parameters (depth, planting spot shape, spacing) and the species composition will be programmed in accordance with the requirements of the silviculture principles, using a user-friendly interface. The energy to power the robot’s working units and its drive system will be provided by hydraulic systems driven by a compact internal combustion engine. The modular design of the robot will enable its further expansion. The turret working head will be able to be additionally equipped with sensors, e.g. for the identification of microhabitats, registration of the robot’s travelling path and seedling distribution, which will facilitate the inventory of the effectiveness of regeneration tasks and enrich the databases of forest spatial information systems, as well as enable the automation of further breeding operations.
The final product will include solutions for recognising the robot's surroundings (the condition of the soil in which the seedlings will be placed) and making decisions depending on the information obtained. The combination of satellite navigation (GPS) methods and the need to take into account information from other sources, necessary for the proper operation of the robot, will allow it to overcome the difficulties caused by a variety of possible soil conditions and terrain configurations (the existence of various, difficult to define obstacles) (Typiak et al. 2019).
4. Design of Robot’s Planting Module
At the current stage of the project, a complete machine planting module has been designed (Adamczyk et al. 2019). It is composed of three main components (Fig. 8). The first one is a tool for planting spot preparation. The second component is a movable dibble for placing seedlings in the soil. According to the assumed efficiency, the work of the machine should take place while travelling (without stopping), with the best possible vertical positioning of the seedling. The last element is a system of two pressing wheels with continuously adjustable geometry.
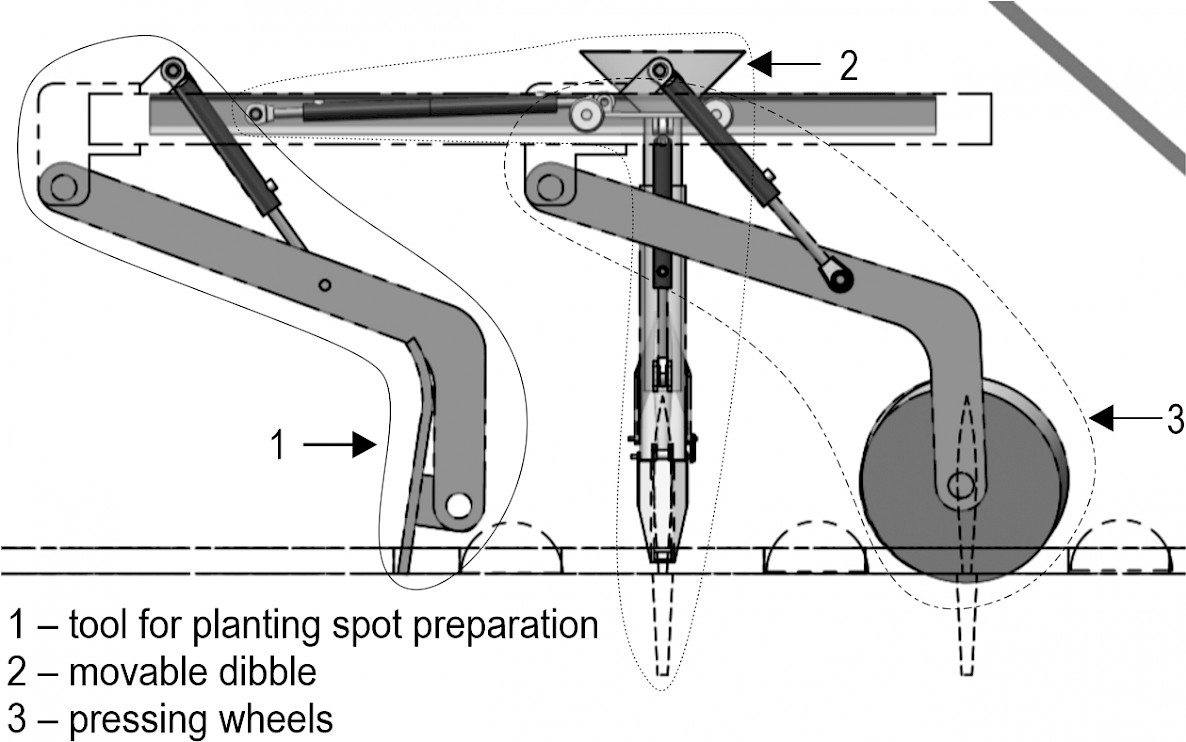
Fig. 8 Working unit elements for planting trees with covered root system
The planting spot preparation tool is mounted in an oscillatory manner on the frame of the working unit via the first rocker arm and an actuator that allows adjusting the position and force of the tool pressing against the soil, while the pressing element is mounted on the frame by the second rocker, the position and pressure of which are regulated by a separate actuator. The main element of the planting unit is in the form of a cylindrical dibble connected to the carriage, which is mounted slidably in relation to the frame and is moved in relation to it along the horizontal axis by means of an independent drive.
Ultimately, the planting module is to be mounted on a specialised, autonomous carrier, while in the case of aggregating the module with agricultural or forestry tractors, the frame of the working unit should be equipped with an appropriate levelling system. The developed conceptual model of such a solution is presented in Fig. 9. Attached to the frame in its rear part, there is an adjustable swing axle with support wheels and, in its front part, a swing hitch to the tractor. Levelling is performed by analysing the indications from the acceleration sensor (gravity sensor) mounted to the frame of the working unit.
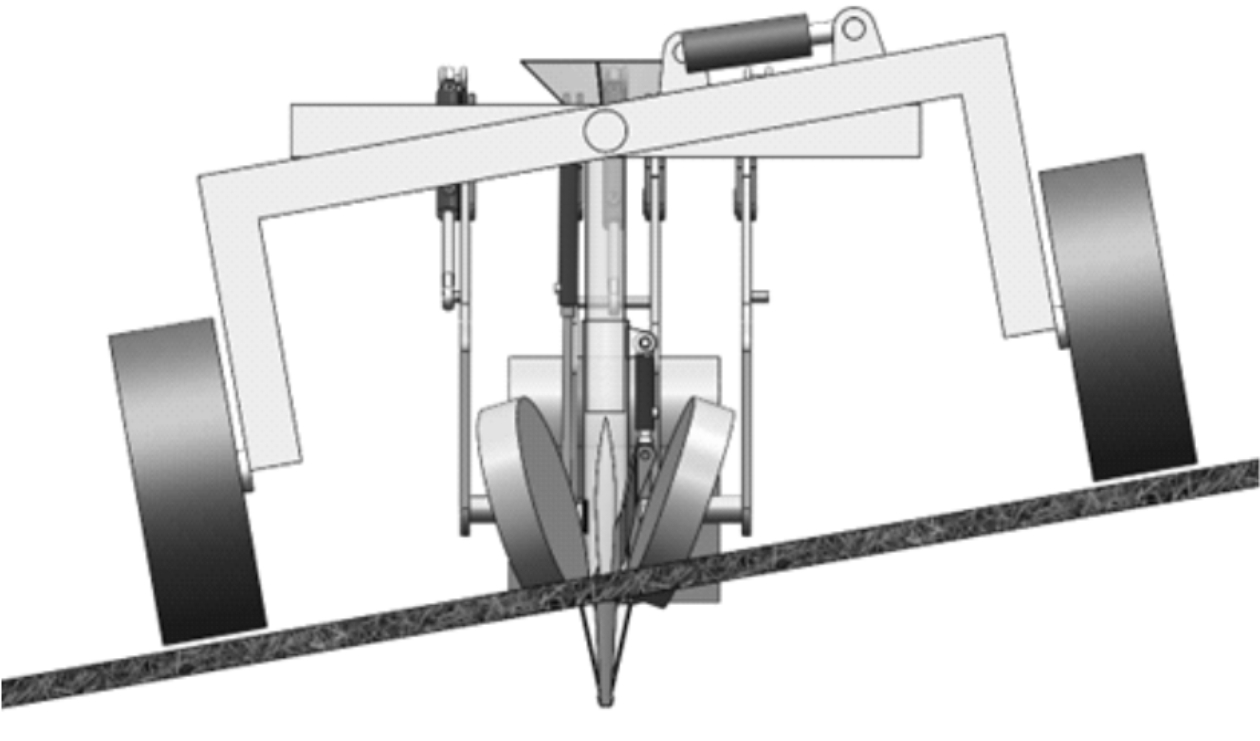
Fig. 9 Robot’s planting module, mounted on a frame with an adjustable swing drive axle, while working on a slope – rear view
Fig. 10 and 11 below show an openable dibble in which the jaws and the cylinder are opened by one drive. The appropriate kinematics is ensured by rockers with pivots placed at an angle, thanks to which the opening occurs as a result of lifting the movable parts of the dibble. The recessed part is characterised by relatively high slenderness which minimises the resistance during penetration into the soil. The fixed part of the dibble remains in contact with the ground until the dibble is fully open, which ensures proper following of the ground during continuous operation of the machine.
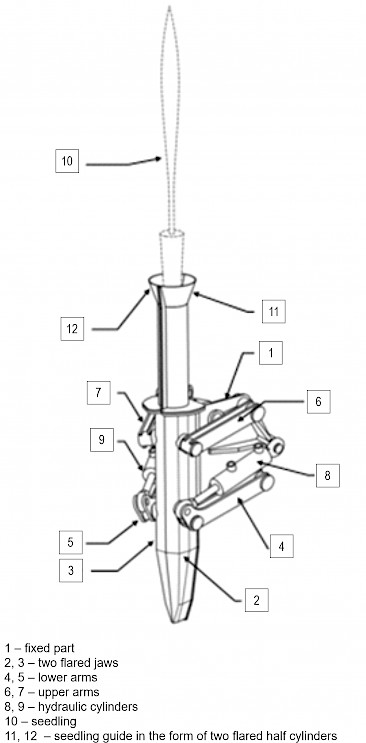
Fig. 10 Innovative design of an openable dibble on rockers
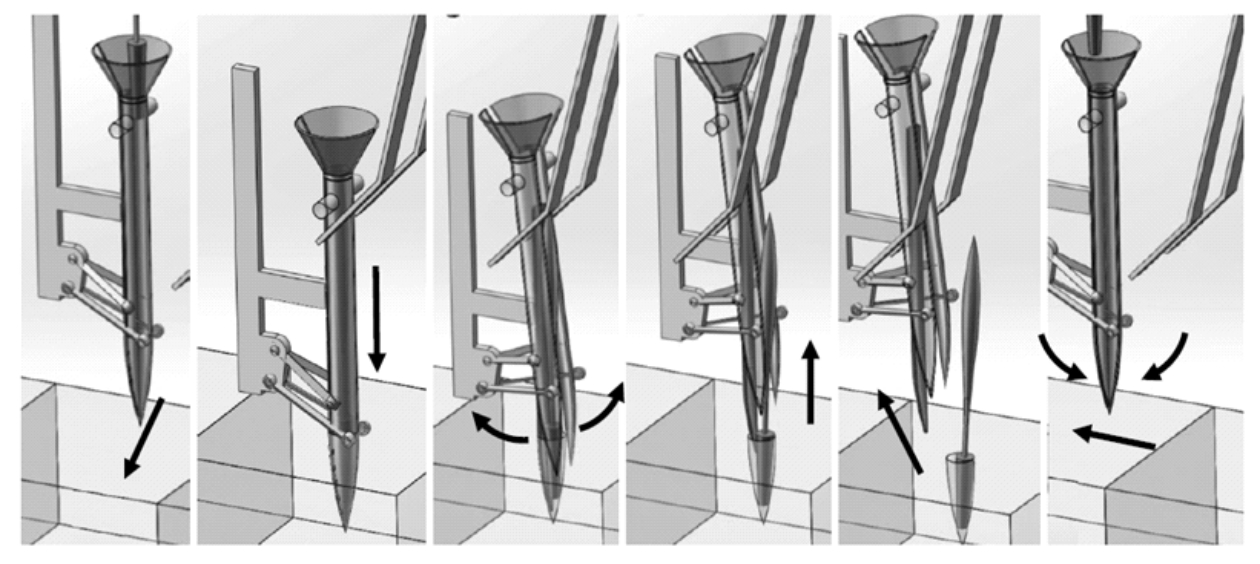
Fig. 11 Innovative design of an openable dibble on rockers – motion kinematics
In the first working phase, a seedling is fed to the dibble, placed in the upper position with its jaws closed, stationary relative to the frame. The seedling is fed by a guide constituting part of the carriage. It moves along the cylinder (by gravity or thanks to the forced flow of compressed air) until it rests on the inner walls of the jaws. Then the dibble is driven into the soil, with the simultaneous commencement of the movement following the ground: the dibble moves downwards in relation to the carriage and towards the back of the frame. After placing the dibble in the soil, the jaws are opened and the dibble is lifted until the entire plant comes out of the cylinder. At this point, the carriage is moved back to its starting position relative to the robot’s frame, the jaws are clamped again, and a new cycle begins.
Elements of the module control system are presented in Fig. 12. The valve coils of the hydraulic actuators, the sensors and additional buttons for operating the module are connected to the controller. The device can be controlled directly from the display by re-setting selected sections or by running the programme in the automatic mode.

Fig. 12 Planting module control system
The operation of the device in the automatic mode is divided into several stages. In the first stage, the condition of compliance of the current position of the device with the initial, transport position is checked: the dibble is raised, the crane is moved to the left, the gripper jaws are clenched. Depending on the indications of inductive sensors mounted on the crane, the gripper and the piston position sensor, the controller generates a voltage signal to the electric valves responsible for the operation of the crane section, the dibble and the gripper until the device is in its initial, transport position. In the next stage, the controller starts counting the time needed to place the seedling in the dibble gripper. After 2 seconds, the controller goes on to the third step. The third step also consists in checking the pressure in the hydraulic system and the output state of the inductive sensor mounted at the opposite end of the crane, which provides information about reaching its extreme position. If the pressure exceeds 200 bar or if the inductive sensor changes its state to high, the dibble stops penetrating into the soil, rises and returns to the transport position. Then, after reaching the starting position, it proceeds without waiting for the second step. In the fourth step, the controller sends a signal to the electric valve responsible for opening the dibble jaws. This step is performed until one of the inductive sensors mounted on the gripper changes its state, i.e. one of the gripper jaws opens. At this point, the controller moves to step five, in which the controller sends a signal to the electric valve responsible for lifting the dibble. This step is performed until the piston rod of the dibble actuator reaches the position of less than 50% of the maximum extension. In the sixth step, the controller continues sending a signal to the electric valve responsible for inserting the dibble actuator piston rod, lifting the dibble in this way, and a signal is sent to the electric valve which controls the hydraulic valve of the engine crane. Signals to the electric valves are sent until the crane is in the transport position – moved to the extreme left, while the dibble is raised. In step seven, the controller sends a signal to the electric valve responsible for closing the gripper. After this step, the process starts all over again: the controller returns to the first step and the cycle of planting the next seedling is initiated (Tylek et al. 2021a).
A pilot study of the planting module (Fig. 12) shows that operation in the automatic mode in partially prepared terrain (the soil loosened, with a low coefficient of compactness, and a fairly level surface) satisfies the functional requirements. In the case of planting seedlings of coniferous species (pine, spruce), the work efficiency of the planting module was equal to 14.3±2.7 seedlings/min. For deciduous species (oak, beech) it was lower and amounted to 9.1±3.2 seedlings/min. In this case, the performance was characterised by significantly higher variability. This corresponds to planting in a previously prepared reclaimed area. During the machine’s operation under real conditions in the forest, the dibble will work in the terrain with an irregular profile; therefore, it will be necessary to provide information about the exact penetration of the dibble into the ground. An ultrasonic sensor or a limit switch can be used for this purpose. The aim of further research will be to find out which of the sensors is better suited for this purpose.
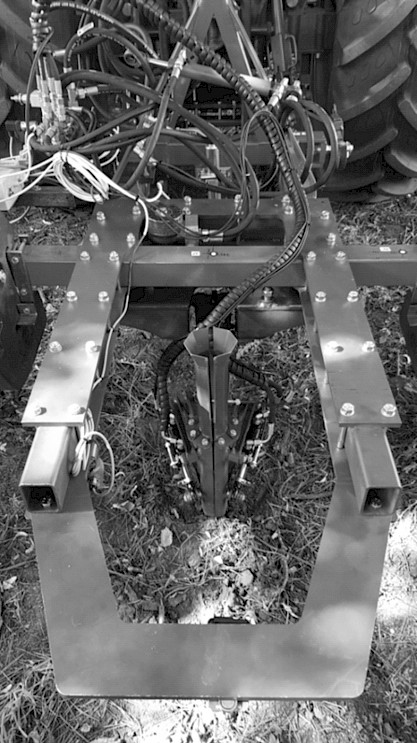
Fig. 13 Functional model of module (mounted on a frame aggregated with a universal tractor) during pilot field tests
5. Discussion
The currently used reforestation techniques and technologies are labour- and cost-intensive. The forest policy of the European Union member states aims to increase the acreage of multi-species stands and to restore forest areas (after felling and skidding the wood). Other areas intended for afforestation are reclaimed (post-industrial) and agricultural areas, which are not intended for further agricultural use for various reasons (Paschalis-Jakubowicz 2012). The habitat conditions of former mining areas subject to forest reclamation are highly diversified due to considerable spatial variability of soil substrates and topography (Macdonald et al. 2015). As a result of mining activities, the soil cover is destroyed, and the substrates deposited in dumps or exposed in excavations become the bedrock of the emerging soil (Brevik 2013, Šourková et al. 2005). The soils in the post-mining areas are formed of genetically diverse deposits, including Quaternary sands and clays, Miocene sands and Neogene silts, and in the case of objects accompanying hard coal mining, Carboniferous rocks (Pietrzykowski and Krzaklewski 2018). These formations are often mixed with one another, both horizontally within a single post-mining site and vertically in the soil profile, and are characterised by properties unfavourable for introducing vegetation (Pietrzykowski 2014). These unfavourable properties include, among others: lack of soil organic matter (SOM), deficiency and unfavourable quantitative ratios of nutrients, especially nitrogen and phosphorus, both extremely low and high pH values, unfavourable air-water properties, salinity and excessive concentration of trace elements (Feng et al. 2019, Hüttl and Weber 2014, Pietrzykowski et al. 2015,). This predestines the use of seedlings with high-quality root balls and optimal biometric parameters in such areas (Banach et all. 2020).
Increasing the acreage of stands with the simultaneous application of labour-intensive, fairly inefficient techniques and technologies is difficult to implement, especially during the accumulation of forest regeneration tasks caused by natural disasters. These difficulties are eliminated by the proposed innovative solution: an automatic device for planting seedlings with a covered root system, grown in container nurseries. Its planting module has been submitted to the Patent Office of the Republic of Poland under the number P.432333 as »The working module of an automatic device for planting trees with a covered root system« (Adamczyk et al. 2019).
The introduction of machines operating in an automatic or semi-automatic system is necessary in connection with the predicted problems with employing low-skilled workers as well as the increasing costs of such activities (Kocel 2013). Such systems allow for improving the operational efficiency of the machines used and for reducing the specific fuel consumption, which has a positive effect on the natural environment (Przygodziński et al. 2017). In the countries of Western Europe, Scandinavia and Canada, nurseries with a covered root system, and then container nurseries, have appeared mainly for economic reasons. This technology allows for greater intensification of production, mechanisation and automation of work, which gives measurable effects in the form of lower production costs, as compared to seedlings produced in a traditional way (Szabla and Pabian 2003). In Poland, container nurseries were introduced for environmental reasons, when at the end of the 20th century Polish forestry needed an effective tool for forest regeneration after fires and for the reclamation of degraded post-industrial areas (Kowalski 2007, Wesoły 2009). In Poland, the production of this type of seedlings amounts to about 10%, i.e. several dozen million pieces per year, and is systematically growing thanks to the expansion of the network of container nurseries producing seedlings with a covered root system in plastic or polystyrene containers. Such production is sufficient to fill the area of nearly 20 thousand ha per year.
In Europe, the problem of forest fires has so far primarily concerned the southern countries. In 2017 alone, fires affected over 0.8 Mln ha of forests in Mediterranean countries (de Rigo et al. 2017), which required regeneration with the use of seedlings with a covered root system. However, in the last years, large-scale fires have also occurred in central and northern Europe, such as in Sweden. The risk of forest fires is likely to increase in nearly all of Europe due to climate change and drought.
The potential global demand for autonomous devices for planting forest tree seedlings with covered root systems is high. Only in Sweden, regeneration amounts to about 200,000 ha/year and most of it is performed with the use of this type of seedlings. The same is also true in large forest economies such as Finland, Germany, Spain, France or Norway (Bernadzki 2006, Central Statistical Office 2012).
One of the key issues in silviculture is the proper selection of the technology for the establishment of cultures, including the soil preparation method, seedling type and the implementation tool. Afforestation of 1 hectare of area requires on average more than 40 man-hours (planting, distribution of seedlings). It is therefore a job that requires at least 5 workers per eight-hour day of very hard work, for which it is increasingly difficult to find workers. In addition, the use of herbicides and repellents exposes the workers to these harmful chemicals. Thus, the initial measurements of the efficiency of the planting module seem very optimistic. Moreover, the quality of mechanical planting is better than the quality of manual labour, resulting in a higher survival rate of the young trees and their faster growth in height (Szyguła et al. 2012).
5. Conclusions
In contrast to the current methods of forest breeding mechanisation, the proposed innovative automated system will be characterised by the following advantages:
Elimination of manual labour – the worker only fills the device’s storage unit with containers with seedlings and controls the device’s operation remotely
Þ Increase in performance – related to the extension of operational times and selection of the optimal trajectory of vehicle travel
Þ Decrease in the energy consumption of agrotechnical treatments – elimination of soil surface preparation in favour of preparation of a planting spot
Þ Shortening of the technological process – the establishment of cultures with the use of seedlings grown in standard containers; elimination of seedling transfer to dedicated storage units
Þ Increase in cultivation success – reducing the planting-related stress by eliminating the previous removal of seedlings from their containers, which would cause root ball over-drying and its losing some of the soil; and ensuring proper verticalisation of a seedling as well as proper root ball compaction
Þ Adaptation to work in an area that has not been cleared and in steeply sloping terrain – the use of satellite navigation systems and automatic levelling
Þ A high potential for system expansion – modular structure, enabling the use of a platform to aggregate other working elements, e.g. for crop care.
Acknowledgments
The research is part of the project entitled »A mobile automatic device for forest regeneration tasks and afforestation of former farmland and reclaimed areas (RoboFoR)«, No. EO.271.3.11.2019. The project has been financed by the General Directorate of State Forests in Warsaw.
7. References
Adamczyk, F., Gościańska-Łowińska, J., Szczepaniak, J., Szychta, M., Kapela, D., Smela, A., Tylek, P., Sowa, J., Walczyk, J., Szewczyk, G., Kormanek, M., Juliszewski, T., Kiełbasa, P., 2019: Zespół roboczy automatu do sadzenia drzew z zakrytym systemem korzeniowym. Zgłoszenie patentowe nr P.432333 (The working module of an automatic device for planting trees with a covered root system. Patent application no P.432333).
Adamczyk, F., Wojciechowski, J., Tylek, P., Sowa, J.M., Walczyk, J., Tadeusiewicz, R., 2019: The concept of construction of a mobile automatic device for forest regeneration tasks and afforestation of former farmland and reclaimed areas. W: Farm Machinery and Processes Management in Sustainable Agriculture: X International Scientific Symposium FMPMSA, 13–18, Lorencowicz, E., Uziak, J., Huyghebaert, B. (red.), https://doi.org/10.24326/fmpmsa.2019.1
Banach, J., Małek, S., Kormanek, M., Durło, G., 2020: Growth of Fagus sylvatica L. and Picea abies (L.) Karst. seedlings grown in hiko containers in the first year after planting. Sustainability 12(17): 7155. https://doi.org/10.3390/su12177155
Bell, F.G., Donnelly, L.J., 2006: Mining and its Impact on the Environment. Taylor & Francis, London and New York.
Bernadzki, E., 2006: Opracowanie zbiorowe pod redakcją Eugeniusza Bernadzkiego Lasy i leśnictwo krajów Unii Europejskiej (Forests and forestry of the European Union). CILP, Warszawa.
Brevik, E.C., 2013: Forty Years of Soil Formation in a South Georgia, USA Borrow Pit. Soil Horizons 54(1): 20–29. https://doi.org/10.2136/sh12-08-0025
Cambi, M., Certini, G., Fabiano, F., Foderi, C., Laschi, A., Picchio, R., 2016: Impact of wheeled and tracked tractors on soil physical properties in a mixed conifer stand. iForest 9(1): 89–94. https://doi.org/10.3832/ifor1382-008
Central Statistical Office 2012: Forestry, Warsaw.
de Rigo, D., Libertà, G., Houston Durrant, T., Artés Vivancos, T., San-Miguel-Ayanz, J., 2017: Forest fire danger extremes in Europe under climate change: variability and uncertainty. Publications Office of the European Union, Luxembourg.
Dornyak, O., Novikov, A., 2019: Immersion freezing of a scots pine single seed in a water-saturated dispersion medium: Mathematical modelling. Inventions 5(4): 51. https://doi.org/10.3390/inventions5040051
Ersson, B.T., 2014: Concepts for Mechanized Tree Planting in Southern Sweden. Faculty of Forest Sciences, Department of Forest Biomaterials and Technology, Swedish University of Agricultural Sciences, Umeå.
Ersson, B.T., Bergsten, U., Lindroos, O., 2014: Reloading mechanized tree planting devices faster using a seedling tray carousel. Silva Fennica 48(2): article id 1064. https://doi.org/10.14214/sf.1064
Feng, Y., Wang, J., Bai, Z., Reading, L., 2019: Effects of surface coal mining and land reclamation on soil properties: A review. Earth-Science Reviews 191: 12–25. https://doi.org/10.1016/j.earscirev.2019.02.015
Gallis, Ch., 2013: Increasing Productivity and Controlling of Work Fatigue in Forest Operations by Using Prescribed Active Pauses: a Selective Review. Croatian Journal of Forest Engineering 34(1): 103–113.
Ghaffarian, M.R., Stampfer, K., Sessions, J., 2009: Comparison of three methods to determine optimal road spacing for forwarder-type logging operations. Journal of Forest Science 55(9): 423–431.
Grzywiński, W., 2005: Koszt energetyczny pracy w leśnictwie (Energy expenditure of forestry work). Zastosowania Ergonomii 1–3: 259–267.
Grzywiński, W., 2007: Ergonomia i ochrona pracy w leśnictwie (Ergonomics and labour protection in forestry). Wydawnictwo Akademii Rolniczej im. A. Cieszkowskiego w Poznaniu.
Horvat, D., Zečić, Ž., Šušnjar, M., 2007: Morphological characteristics and productivity of skidder ECOTRAC 120V. Croatian Journal of Forest Engineering 28(1): 11–25.
Hüttl, R.F., Weber, E., 2014: Forest ecosystem development in post-mining landscapes: a case study of the Lusatian lignite district. Naturwissenschaften 88(8): 322–329. https://doi.org/10.1007/s001140100241
Johnston, K., Cheung, I.Ch., Henderson, F., Queen, G., Lida, K., 2016: Enhancement of Forestry Tree Planting Machine. ME519 Group Project. Mechanical and Aerospace Engineering, University of Strathclyde, Glasgow.
Kocel, J., 2013: Firmy leśne w Polsce (Forest enterprises in Poland). CILP, Warszawa.
Kowalski, S., 2007: Opracowanie zbiorowe pod redakcją Stefan Kowalskiego. Ektomikoryzy – Nowe biotechnologie w polskim szkółkarstwie leśnym (Ectomycorrhizae – New technologies in Polish forest nursery science). CILP, Warszawa.
Laine, T., 2017: Mechanized tree planting in Finland and improving its productivity. Dissertationes Forestales 239. Department of Forest Sciences Faculty of Agriculture and Forestry University of Helsinki, Finland. https://doi.org/10.14214/df.239
Lindroos, O., Ringdahl, O., La Hera, P., Hohnloser, P., Hellström, T. 2015. Estimating the Position of the Harvester Head - A Key Step towards the Precision Forestry of the Future? Croat. J. For. Eng. 36(2): 147–164.
Macdonald, S.E., Landhäusser, S.M., Skousen, J., Franklin, J., Frouz, J., Hall, S., Jacobs, D.F., Quideau, S., 2015: Forest restoration following surface mining disturbance: challenges and solutions. New Forests 46(5): 703–732. https://doi.org/10.1007/s11056-015-9506-4
Novikov, A., Ivetić, V., Novikova, T., Petrishchev, E., 2019: Scots pine seedlings growth dynamics data reveals properties for the future proof of seed coat color grading conjecture. Data 4(3): 106. https://doi.org/10.3390/data4030106
Paschalis-Jakubowicz, P., 2012: Uwarunkowania strategii rozwoju Lasów Państwowych. CILP, Warszawa.
Picchio, R., Proto, A.R., Civitarese, V., Di Marzio, N., Latterini, F., 2019: Recent contributions of some fields of the electronics in development of forest operations technologies. Electronics 8(12): 1465. https://doi.org/10.3390/electronics8121465
Pietrzykowski, M., 2014: Soil quality index as a tool for Scots pine (Pinus sylvestris) monoculture conversion planning on afforested, reclaimed mine land. Journal of Forestry Research 25(1): 63–74. https://doi.org/10.1007/s11676-01300418-x
Pietrzykowski, M., Krzaklewski, W., 2018: Reclamation of mine lands in Poland. In: M.N.V. Prasad, P.J. de Campos Favas, S.K. Maiti (eds.) Bio-Geotechnologies for Mine Site Rehabilitation, Elsevier Inc.: 493–513. https://doi.org/10.1016/B978-0-12-812986-9.00027-0
Pietrzykowski, M., Socha, J., van Doorn, N.S., 2015: Scots pine (Pinus sylvestris L.) site index in relation to physico-chemical and biological properties in reclaimed mine soils. New Forests 46(2): 247–266. https://doi.org/10.1007/s11056-014-9459-z
Przygodziński, P., Rybacki, P., Grześ, Z., Osuch, A., Osuch, E., 2017: Analysis of the farm tractor’s automatic control system suitability in the process of ground tillage and crop cultivation in organic farm. Journal of Research and Applications in Agricultural Engineering 62(4): 103–106.
Sabo, A., Poršinsky, T., 2005: Skidding of fir roundwood by Timberjack 240C from selective forests of Gorski Kotar. Croatian Journal of Forest Engineering 26(1): 13–27.
San-Miguel-Ayanz, J., Durrant, T., Boca, R., Libertà, G., Branco, A., de Rigo, D., Ferrari, D., Maianti, P., Vivancos, T.A., Oom, D., Pfeiffer, H., Nuijten, D., Leray, T., 2019: Forest Fires in Europe, Middle East and North Africa 2018. JRC Technical Report, European Union.
Shamshiri, R.R., Weltzien, C., Hameed, I.A., Yule, I.J., Grift, T.E., Balasundram, S.K., Pitonakova, L., Ahmad, D., Chowdhary, G., 2018: Research and development in agricultural robotics: A perspective of digital farming. Int. J. Agric. & Biol. Eng. 11(4): 1–14. https://doi.org/10.25165/j.ijabe.20181104.4278
Sokolov, S.V., Novikov, A.I., 2019: New optoelectronic systems for express analysis of seeds in forestry production. For. Eng. J. 9: 5–13.
Šourková, M., Frouz, J., Fettweis, U., Bens, O., Hüttl, R.F., Šantrůčková, H., 2005: Soil development and properties of microbial biomass succession in reclaimed post mining sites near Sokolov (Czech Republic) and near Cottbus (Germany). Geoderma 129(1–2): 73–80. https://doi.org/10.1016/j.geoderma.2004.12.032
Szabla, K., Pabian, R., 2003: Szkółkarstwo kontenerowe. Nowe technologie i techniki w szkółkarstwie leśnym (Container nurseries. New technologies and techniques in forest nursery science). CILP, Warszawa.
Szewczyk, G., Spinelli, R., Magagnotti, N., Tylek, P., Sowa, J.M., Rudy, P., Gaj-Gielarowiec, D., 2020: The mental workload of harvester operators working in steep terrain conditions. Silva Fennica 54(3): article id 10355. https://doi.org/10.14214/sf.10355
Szyguła, J., Barzdajn, W., Kowalkowski, W., 2012: Wpływ sposobu sadzenia na wzrost uprawy sosny zwyczajnej (Pinus sylvestris L.) założonej na gruncie porolnym (Effect of the planting method on the growth of Scots pine (Pinus sylvestris L.) plantation established on former agricultural land). Sylwan 156(2): 88−99.
Tadeusiewicz, R., Tylek, P., Adamczyk, F., Kiełbasa, P., Jabłoński, M., Bubliński, Z., Grabska-Chrząstowska, J., Kaliniewicz, Z., Walczyk, J., Szczepaniak, J., Juliszewski, T., Szaroleta, M., 2017: Assessment of selected parameters of the automatic scarification device as an example of a device for sustainable forest management. Sustainability 9(12): 2370, https://doi.org/10.3390/su9122370
Talbot, B., Astrup, R., 2021: A review of sensors, sensor-platformsand methods used in 3D modelling of soil displacement after timber harvesting. Croatian Journal of Forest Engineering 42(1): 149–164. https://doi.org/10.5552/crojfe.2021.837
Tylek, P., Demidov, D.N., Lysych, M.N., Petrishchev, E.P., Maklakova, E.A., 2020a: The features designed of mechatronic system of adaptive hopper's feeder: case study for Scots pine seeds morphometry. IOP Conference Series: Earth and Environmental Science 595(1): p. 012054. International Forestry Forum »Forest ecosystems as global resource of the biosphere: calls, threats, solutions«. https://doi.org/10.1088/1755-1315/595/1/01205
Tylek, P., Walczyk, J., Sowa, J.M., Szewczyk, G., Kormanek, M., Pietrzykowski, M., Juliszewski, T., Kiełbasa, P., Szychta, M., Adamczyk, F., Szczepaniak, J., Szulc, T., Tadeusiewicz, R., 2020b: Koncepcja automatycznej sadzarki do sadzonek z zakrytym systemem korzeniowym. Nowoczesne technologie i inżynieria w zrównoważonym użytkowaniu lasu, Klamerus-Iwan A. (red.): 451–464.
Tylek, P., Wojciechowski, J., Adamczyk, F., Szychta, M., Walczyk, J., Szewczyk, G., Kiełbasa, P., Kormanek, M., Mateusiak, Ł., 2021a: Drive and hydraulic control of the planting module of the automatic forestry planter. Mobilné energetické prostriedky – Hydraulika – Životné prostredie – Ergonómia mobilnych strojov. Technická Univerzita vo Zvolene, 242–250.
Tylek, P., Tadeusiewicz, R., Jabłoński, M., Piłat, A., Kaliniewicz, Z., Adamczyk, F., Klocek, J. 2021b: Systemy wizyjne automatu do przedsiewnego przygotowania żołędzi (Machine vision systems for pre-sowing preparation of acorns). Przegląd Elektrotechniczny 1(97): 188−191. https://doi.org/10.15199/48.2021.01.39
Typiak, A., Typiak, R., 2019: Creating of a surroundings map for a remote controlled biomass transportation vehicle. Journal of Research and Applications in Agricultural Engineering 64(4): 34–38.
Visser, R., Obi, O.F., 2021: Automation and robotics in forest harvesting operations: identifyingnear-term opportunities. Croatian Journal of Forest Engineering 42(1): 13–24. https://doi.org/10.5552/crojfe.2021.739
Wesoły, W., 2009: Opracowanie zbiorowe pod redakcją Wojciecha Wesołego. Szkółkarstwo Leśne od A-Z (Forest nursery from A to Z), CILP, Warszawa.
Więsik, J., Aniszewska, M., 2011: Urządzenia techniczne w produkcji leśnej. T. 1. Urządzenia do hodowli i ochrony lasu (Technological devices in forest production. Vol. 1. Devices for silviculture and forest protection). Wydawnictwo SGGW, Warszawa.
© 2022 by the authors. Submitted for possible open access publication under the
terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Authors' addresses:
Assist. prof. Paweł Tylek, PhD *
e-mail: pawel.tylek@urk.edu.pl
Assist. prof. Grzegorz Szewczyk, PhD
e-mail: grzegorz.szewczyk@urk.edu.pl
Assist. prof. Mariusz Kormanek, PhD
e-mail: mariusz.kormanek@urk.edu.pl
Prof. Józef Walczyk, PhD
e-mail: rlwalczyk@gmail.com
Prof. Janusz M. Sowa, PhD
e-mail: janusz.sowa@urk.edu.pl
University of Agriculture in Cracow
Faculty of Forestry
Department of Forest Utilization, Engineering and Forest Techniques
Al. 29 Listopada 46
31-425 Kraków
POLAND
Prof. Marcin Pietrzykowski, PhD
e-mail: m.pietrzykowski@urk.edu.pl
Bartłomiej Woś, PhD
e-mail: bartlomiej.wos@urk.edu.pl
University of Agriculture in Cracow
Faculty of Forestry
Department of Ecology and Silviculture
Al. 29 Listopada 46
31-425 Kraków
POLAND
Assist. prof. Paweł Kiełbasa, PhD
e-mail: pawel.kielbasa@urk.edu.pl
Prof. Tadeusz Juliszewski, PhD
e-mail: tadeusz.juliszewski@urk.edu.pl
University of Agriculture in Cracow
Faculty of Production and Power Engineering
Department of Machines Exploitation Ergonomics and Production Processes
ul. Balicka 116B
30-149 Kraków
POLAND
Prof. Ryszard Tadeusiewicz, PhD
e-mail: rtad@agh.edu.pl
AGH University of Science and Technology
Faculty of Electrical Engineering, Automatics, Computer Science and Biomedical Engineering
Department of Biocybernetics and Biomedical Engineering
al. Mickiewicza 30
30-059 Kraków
POLAND
Assist. prof. Florian Adamczyk, PhD
e-mail: florian.adamczyk@pimr.lukasiewicz.gov.pl
Marek Danielak, MSc
e-mail: marek.danielak@pimr.lukasiewicz.gov.pl
Jacek Wojciechowski, PhD
e-mail: jacek.wojciechowski@pimr.lukasiewicz.gov.pl
Assist. prof. Jan Szczepaniak, PhD
e-mail: jan.szczepaniak@pimr.lukasiewicz.gov.pl
Marek Szychta, MSc
e-mail: marek.szychta@pimr.lukasiewicz.gov.pl
Tomasz Szulc, MSc
e-mail: tomasz.szulc@pimr.lukasiewicz.gov.pl
Łukasiewicz Research Network-Industrial Institute of Agricultural Engineering
ul. Starolecka 31
60-963 Poznan
POLAND
* Corresponding author
Received: June 10, 2021
Accepted: January 7, 2022
Original scientific paper