Automation and Robotics in Forest Harvesting Operations: Identifying Near-Term Opportunities
doi: 10.5552/crojfe.2021.739
volume: 42, issue:
pp: 12
- Author(s):
-
- Visser Rien
- Obi Okey Francis
- Article category:
- Subject review
- Keywords:
- autonomous; forestry; mechatronics; machinery; remote control
Abstract
HTML
Technology development, in terms of both capability and cost-effective integration, is moving at a fast pace. While advanced robotic systems are already commonplace in controlled workspaces such as factories, the use of remote controlled or autonomous machines in more complex environments, such as for forest operations, is in its infancy. There is little doubt autonomous machinery will play an important role in forest operations in the future. Many machine functions already have the support of automation, and the implementation of remote control of the machine where an operator can operate a piece of equipment, typically in clear line-of sight, at least is commonly available. Teleoperation is where the operator works from a virtual environment with live video and audio feedback from the machine. Since teleoperation provides a similar operator experience to working in the machine, it is relatively easy for an operator to use teleoperation. Autonomous systems are defined by being able to perform certain functions without direct control of a human operator. This paper presents opportunities for remote control, teleoperated machines in forest operations and presents examples of existing developments and ideas from both forestry and other industries. It identified the extraction phase of harvesting as the most logical placement of autonomous machines in the near-term. The authors recognise that, as with all emerging technologies and sectors, there is ample scope for differences in opinions as to what will be commercially successful in the future.
Automation and Robotics in Forest Harvesting Operations: Identifying Near-Term Opportunities
Rien Visser, Okey Francis Obi
Abstract
Technology development, in terms of both capability and cost-effective integration, is moving at a fast pace. While advanced robotic systems are already commonplace in controlled workspaces such as factories, the use of remote controlled or autonomous machines in more complex environments, such as for forest operations, is in its infancy. There is little doubt autonomous machinery will play an important role in forest operations in the future. Many machine functions already have the support of automation, and the implementation of remote control of the machine where an operator can operate a piece of equipment, typically in clear line-of sight, at least is commonly available. Teleoperation is where the operator works from a virtual environment with live video and audio feedback from the machine. Since teleoperation provides a similar operator experience to working in the machine, it is relatively easy for an operator to use teleoperation. Autonomous systems are defined by being able to perform certain functions without direct control of a human operator. This paper presents opportunities for remote control, teleoperated machines in forest operations and presents examples of existing developments and ideas from both forestry and other industries. It identified the extraction phase of harvesting as the most logical placement of autonomous machines in the near-term. The authors recognise that, as with all emerging technologies and sectors, there is ample scope for differences in opinions as to what will be commercially successful in the future.
Keywords: autonomous; forestry; mechatronics; machinery; remote control
1. Introduction
Technology development, in terms of both capability and cost-effective integration, is moving at a fast pace. Robotics, defined as »a scientific and engineering discipline that is focused on the understanding and use of artificial, embodied capabilities«, recently celebrated its 50-year anniversary. To date, robotics has mainly allowed people to avoid doing things that are »dirty, dull and dangerous«, but modern robotics can also provide »economic growth, improved quality of life and empowerment of people« (Christensen 2016). The drivers for »next generation« harvesting systems are already established and include the continuous need for improved efficiency and cost-effectiveness, but also safety, and addressing skilled machine operator shortages in rural areas. While equipment manufacturers continue to develop and integrate new technologies, they tend to do so at a rate that ensures commercial returns for their investments. For the forest industry, one limitation for more extenisve use of autonomous equipment is the lack of larger-scale market demand for harvesting machinery. Automation of forestry equipment lags larger industries such as agriculture, mining or the military. For agriculture and mining, the primary reasons for success are the scale of their industry, the more homogenous work environments and development investments. In terms of equipment development, it is predicted that farm technologies could become a $240 billion market opportunity for agricultural suppliers, with smaller driverless tractors a $45 billion market on its own (Dorfman 2009). However, even in agriculture many remote controlled or autonomous machine developments remain in the prototype or pre-commercial stage.
Terms associated with robotics are often erroneously used interchangably. It is useful to review the terms and distinguish between differing concepts. The following terms are summarised from a range of literature for the purpose of providing a more concise reference point when discussing application opportunities.
Þ automation – the technique, method, or system of operating or controlling a process by highly automatic means, as by electronic devices, reducing human intervention to a minimum
Þ remote control – control of a machine or apparatus from a distance by means of radio or infrared signals transmitted from a device
Þ teleoperation – the electronic remote control of machines. Teleoperation is the technical term for the operation of a machine, system or robot from a distance
Þ slave – a machine or component controlled by another machine or component
Þ robot – a machine capable of carrying out a complex series of actions automatically, especially one programmable by a computer
Þ robotics – the branch of technology that deals with the design, construction, operation, and application of robots
Þ drone – an unmanned aircraft or ship that can navigate autonomously, without human control or beyond line of sight
Þ autonomous – having the freedom to act independently; (of a vehicle) navigated and maneuvered by a computer without a need for human control or intervention under a range of driving situations and conditions.
With a focus on just machine automation, Lindroos et al. (2017) provide a clear summary of terms that can be used to define the level of automation and human interaction.
Table 1 Levels of automation and examples, as reported by Lindroos et al. (2017)
|
Description |
Human involvement |
Example |
|
Operator assistance |
Basic simplified control functions |
Computer support simplifying some actions: e.g. automatic transmission, cruise control |
|
Partial automation |
Function-specific automation |
e.g. automatic self-parking, yarder carriage movement |
|
Conditional automation |
Limited self-driving automation |
Autonomous vehicle movement, but under constant supervision of a person. Ability to reason outside a given set of conditions is limited |
|
High automation |
Fully automated for a defined use |
A vehicle trained to drive on its own, not requiring supervision, but will request & require help |
|
Driverless |
Fully automated for all situations |
A vehicle driving on its own, able to make its own decisions and learn from its surroundings |
In forest operations, incremental improvements are continuously being made to machines. Embedded electronics such as sensors, measuring tools, video feeds, etc. are now used to automate specific functions such as processing stems to logs by moving the head to predetermined positions according to log grade. The data captured during felling and processing can be augmented by geospatial information, communication technologies and cloud services to analyse and optimise machine performance (Fig. 1), as well as use this to implement the concept of precision forestry (Olivera and Visser 2016).

Fig. 1 »Smart« forestry using an array of technologies (Ushiyama 2017)
In addition, it has been shown that the use of such technology makes it easier to learn to operate harvester or forwarder machines (Lofgren 2006, Englund et al. 2017). In the study by McEwan (2017), it was concluded that the majority of forestry machines would adopt smart tablet monitors by 2020, GPS by 2020, and remote control by 2025. However, adoption of LiDAR and/or other sensors for tree selection and the use of autonomous skidder for extraction was foreseen in 20 years.
Information on robotics in forest operations is primarily found in the »grey literature« (i.e. websites). However, examples of journal articles started in the late 1980s with Courteau (1989) providing an overview of developments of robotics in forestry. Guimier (1998) concluded that new technology in machines would be equipped with »intelligent« control systems that allow them to adapt to their working environment. Thor (2014) noted that mechanised systems would continue to be automated until robots could be used for harvesting operations. More advanced concepts are presented for specific elements such as development of unmanned forwarders (Ringdahl 2011) or summary papers that investigated a range of robotic options (Hellstrom et al. 2009, Parker et al. 2015, Parker et al. 2016, Lindroos 2017). A number of forest operations research groups are experimenting with remote controlled or autonomous vehicles. While there is often much speculation on future benefits, there is almost a complete absence of information on actual productivity improvements of any of the prototypes developed. With original manufacturing companies starting to take a stronger interest, such information will become critical for investing in their development, or for contractors to purchase such equipment for their operation.
Successful implementation of autonomous equipment will be driven by their productivity and operational cost. Given that labour is typically about 30% to 40% of running costs in European mechanised operations (Hellstrom 2009), an autonomous machine can be less productive but still be more cost effective. However, there are other factors to consider; a study by McEwan (2017) highlighted the consideration of additional benefits relating to health and safety, environment, quality (in terms of increasing value or reducing waste), and also social aspects. While modern machines are well designed with regard to ergonomics, this has led to many operators working longer hours per day (Nicholls et al. 2004) and has created different health risks to the traditional manual physical risks. For example, harvest operators in thinning are required to make about 4000 control inputs per hour (Magagnotti 2016) and this can quickly lead to fatigue, or a forwarder operator might spend many hours a day traversing the same trails that can lead to monotony. A higher degree of machine autonomy could readily decrease these types of occupational health and safety risks.
There is a strong perception that robots will take people's jobs, or reduce pay level for operators to compete with robots. Acemoglu and Restrepo (2017) indicate that each additional robot reduces employment by 5 workers, and every robot that is added to the workforce per 1000 human workers caused wages to drop by 0.25%. However, there are also studies also showing that over 35% of all robotic related jobs will be vacant by 2020 and that people skilled in robotic development, implementation and maintenance will see salary increased up to 60%. An 2016 IDC study (Zhang et al. 2016) predicting future worldwide robotic developments has three interesting and relevant findings for the development of forest operations equipment:
Þ that 30% of all new robotic deployments will be smart collaborative robots that operate three times faster than today's robots and are safe for work around humans in 2018
Þ that governments will begin implementing robotics-specific regulations to preserve jobs and to address concerns of security, safety, and privacy by 2019
Þ that 60% of robots will depend on cloud-based software to define new skills, cognitive capabilities, and application programs, leading to the formation of a robotics cloud marketplace in 2020.
The latter development will be particularly important for higher levels of machine automation to succeed in more remote and complex forest work environments.
While these are examples of automated components of forestry supply chain, this paper focusses primarily on the application of automation and robotics in timber harvesting systems, with a focus on identifying the most immediate near-term opportunities for development and deployment.
2. Developing New Harvesting Systems
Developing new forestry equipment or systems requires ideas, testing, development, prototypes, investment and commercialisation through combined efforts of researchers and equipment manufacturers. There have been some great examples of researchers and companies combining resources to develop innovations in forestry machinery; for example, the Plustech six-legged harvesting machine, subsequently owned by Timberjack (Fig. 2). The walking harvester innovation was designed to overcome the challenge of harvesting on steep, sensitive and/or uneven forest terrain (Heinimann 1999), that is, to extend the ability of wheeled and tracked machines. One goal was to be more environmentally friendly on the forest soils by means of spot-ground contact and hence not leaving a continuous track like wheeled or tracked harvesters. While not robotic in terms of machine operation, it certainly pushed robotic technology within the machine system in that the movement of the legs are computer coordinated, with only the movement direction specfiied by the operator.

Fig. 2 Timberjack walking forest harvester (Source: www.theoldrobots.com)
There are examples of higher levels of machine automation that have already been introduced into cable yarders used for extracting timber on steep terrain. Like most extraction systems, they follow a typical pattern of unloaded out, accumulate load, loaded in, and drop load on landing. Two of these phases, unloaded and loaded travel, have been automated, thus removing the need for an operator to be on the machine, or for example allowing the operator to work with an integrated processor. The accumulation phase is managed remotely by the choker-setter, and dropping the stems on the landing by the processor operator. Both have complete control of the yarder by way of a wireless radio remote control, reducing the number of workers while increasing productivity. Other advantages of the computer control system include being able to manage the rate of acceleration and deceleration, setting top speed limit, slowing down in pre-identified areas of concern, as well as the immediate recognition of a load being stuck. Examples of remotely controlled tower yarders include the Konrad KMS 12U and the larger remotely controlled Valentini V1500 (Fig. 3).

Fig. 3 Left: KMS 12U radio-controlled cable crane ( href="http://www.excavators-uk.com/konrad.html">http://www.excavators-uk.com/konrad.html). Right: Valentini V1500 tower yarder (https://www.valentini-teleferiche.it/en/soluzioni/special-machines)
An early example of a commercially available remote controlled harvester is the »Besten« developed in Sweden (Bergkvist et al. 2007). This system consists of a cabless harvester controlled remotely and used in conjunction with one or two forwarders. While many publications are available on the potential benefits for productivity and even fuel consumption, in reality machine productivity was always significantly lower and it was never a commercial success (Chudy 2016).
A number of forestry machines already have remote control operating systems in place. For European skidders, this is typically only to reposition the skidder while the operator is out of the cab for pulling out winch rope or setting chokers. While these machines can also be maneuvered through the forest or along a skid trail, and are promoted as being quicker and safer, no information is available that operating it exclusively as a remote-controlled machine is a commercially viable alternative to operating from the cab.
In New Zealand, as part of a research funded by the Forest Growers Research (FGR) programme, a teleoperated winch-assisted John Deere 909 Feller-Buncher has been trialled. The remote controlled feller-buncher includes a purpose-built control booth trailer for full teleoperation (Fig. 4). To provide the operator a sense of terrain slope, the system includes an artificial horizon line and a »head up display« overlaid on one of the screens. It has been successfully tested in harvesting operation (Parker et al. 2016), partnered with a winch-assist system and is presently commercially available. With the operator taken out of the cab, the system can be pushed onto steeper slopes, but the remote control system in itself does not improve stability and tractability on steep slopes.

Fig. 4 JD909 feller-buncher showing camera angles to enable teleoperation (left); Purpose-built control booth trailer for teleoperation (right) (Image: K. Raymond and ATL)
While teleoperation is intended for actively working machines, in forestry some machines are primarily stationary and only need to be moved sporadically. In this situation an operator is highly underutilised and remote control makes immediate sense. An example is the ATL remote controlled mobile tailhold used in cable logging. The concept is that the yarder operator is able to move the tailhold using simple control and a video feed. This removes the need for a machine operator to be near the tailhold machine that might be stationary for hours during extraction, or avoid the delays associated with having an operator travel to the machine simply to move it. The development of winch-assist systems has encouraged manufacturers to consider a cabless machine. Both the Canadian made T-Mar LogChamp 150 and the Austrian designed Ecoforest T-Winch are machines that act as both an anchor as well as powering a winch that supports operating a felling/shovelling/extraction machine on steep slopes (Fig. 5). While working, this winch-assist machine can be expected to be stationary for extended periods of time and as such it has little need for a dedicated operator. The operator of the machine on the slope can move the winch-assist machine using remote control without exiting the cab. While this presents a labour saving advantage, the other main benefit is in the capital cost saving by being able to design and build the machine itself without a cab.

Fig. 5 Remotely operated cabless T-Mar LogChamp 150 (left) and T-Winch (right) winch-assist machines (Photos: T-Mar Industries Ltd. and J. Hunt)
Most modern forestry machines can readily be converted for remote control at relatively low cost and many working options are already available. Teleoperation requires the additional cost of creating a virtual environment, but creates the opportunity of working from a remote location. For both systems, the machine operation is typically slower, significantly so if the task is complex, and will not be adopted in forest operations strictly based on productivity improvements. However, benefits can quickly accrue when:
Þ operator safety might be compromised
Þ where a full-time operator would be underutilised
Þ where work sites are onerous to reach and/or suitably qualified operators are hard to find.
Social aspects, such as the opportunity for multiple operators to work from a common space, or for people to job share, are more difficult to quantify but can create a work environment that can attract more diverse group of potential employees.
Remote control or teleoperation will most likely become a cost-effective alternative when both the machine is purpose-built (i.e. cabless) and certain machine tasks can be automated, and this could/should be the primary focus of R&D in generating a new market for remotely operated forestry machines.
Some futuristic concepts for advanced forestry autonomous machines have also been put forward. Scion in New Zealand, in conjunction with relevant forest industry partners, is developing a conceptual tree-to-tree »swinging« forest harvesting machine (Fig. 6 - left) with the intent that it could operate independent of the terrain conditions (steepness, roughness, etc.) by staying above the ground moving from tree-to-tree using the trees for support, reducing soil disturbance. Similarly, Ausinsch from the Umeå Institute of Design (Fig. 6 - right) presented an electric machine with four wheels for motion within the forest, but each wheel has embedded felling claws that also allow the machine to propel itself through the forest. It can then fell using its arms to stabilise itself, but revert to wheeled motion to move between trees. While these ideas spur innovation, they are a long way from commercialisation.

Fig. 6 Left, tree-to-tree »swinging« forest harvester (Parker et al. 2015); and right, the futuristic harvester design that has wheeled motion but stretches out to grab and fell trees with claws (Source: www.behance.net/gallery/20374037/BARBRO-Autonomous-Harvester)
3. Developing Autonomous Opportunities
Harvesting can readily be divided into four distinct phases:
Þ felling the trees
Þ extracting the trees
Þ sorting, stacking and loading at the landing (and/or roadside)
Þ transportation from the landing to the market destination.
The following summarises issues and opportunities for each phase:
Felling: When robotic harvesting systems are discussed, the most popular concept or image people have is invariably a robotic/autonomous tree felling machine. While there are technology elements to make this a reality, the software requirements, not to mention the safety and social aspects of having such robots working in our forests, are still in their infancy. For autonomous harvesters to become reality, they must be able to identify individual trees (i.e. from people). Oregon State University, supported by the US Forest Service, has been developing a tree identifiction vision system (Wells and Chung – pers comm 2017). Mounted on a harvester, the stereo camera systems detect and measure trees in real time. The first application is real-time cut-tree selection and stem mapping (inventory) during thinning operations. This technology is currently intended to reduce pre-harvesting tree-marking and post-harvesting inspection requirements, but can eventually provide ‘vision capabilities’ to harvesting machines. This can enhance autonomous opportunities in terms of »thinking«, »controlling« and »movement«.
Extraction: The most realistic almost fully autonomous development will be the extraction systems. Agriculture and mining have shown the way for autonomous movement of a product from a harvester to a processing or storage area. The technology and control systems for movement in a constrained and controlled environment is mature.
The concept of a no cab two-bunk 4-axle »forwarder« as illustrated in Ringdahl (2011), is transferable to a grapple skidder as well. Such a »shuttle« would transport logs (or stems if using a skidder) from the cut-over to a designated processing or storage area (»landing«). Initially it would be expected that the loading would be done either by the manned-harvester and/or loader in the cut-over, and that it would be unloaded again by a loader at the landing. However, unloading and subsequent sorting might also be robotic requiring advanced log recognition software (Westerberg and Shiriaev 2013). This would de-couple the shuttle from either the harvester or the loader at the landing. However, a major US review on robotics recognises that across all applications, except for in defined and controlled environments, autonomous manipulation remains a major limitation to gripping mechanisation that allows objects to be picked up in dynamic and unstructured environments (Christiansen 2016). In this situation, prior knowledge and models depicting such dynamic environment is suggested to be leveraged (Christiansen 2013).
It should be noted that, while we are describing an autonomous system, nearly all will require the ability to be remotely operated for when the software is unsure about a decision. This might be an object it cannot identify on its chosen path, uncertainty about a log for loading, or simply a log coming off the bunk and preventing it from moving. Tasks that are hard to fully automate may require some supervision – described as being either »semi-autonomous« or »continuous assistance systems« (Murphy 2000). While such a system might seem somewhat futuristic, substantial trial work in agriculture has already established the credentials for this development. Based around the idea of precision agriculture and the opportunity to save fuel using the precision afforded by GPS control, crop farmers have experimented with autonomous harvesting systems since about the 1980s. An example of a working system is partnering crop harvesters with autonomous tractor-pulled trailers (»carts«) (Fig. 7). The carts are GPS guided and will move between the depot area and the harvester. While GPS guides the tractor-trailer back towards the harvester, laser sensors on the cart ensure it remains in the optimum position for loading. This concept could be adapted to timber extraction with the shuttle having access to the real-time GPS coordinates of the harvester (and/or loader) in the cutover and moving towards that machine. However, it is recognised that even at the edge of a standing forest, GNSS signals can be restricted and that linear movement across a cutover without obstacle avoidance capability is not possilbe in a forestry cutover.

Fig. 7 Autonomous carts (tractor-pulled trailers) – they move between a geo-spatially fixed unloading area and GPS tracker on the harvester (Source: http://robohub.org)
The broad concept has already been introduced to forestry, with the limitation that it is guided by a wire rope, not GPS. The Konrad »Pully« is a semi-autonomous/remotely operated ground forwarder (Fig. 8) manufactured with the aim of improving soil conservation and safe downhill hauling on steep slope. The Pully runs along a wire rope that connects the steep-slope harvester and the landing/roadside area. The bunk is loaded with processed logs by means of the harvester and needs to be unloaded at roadside. They are progressing on developing a self-loading boom that will automate log pick-up from the ground, but at this stage it is still simply remote control.

Fig. 8 Konrad »Pully« – takes logs from a steep terrain harvester down to the roadside (Source: https://www.forsttechnik.at/en/products/ground-carriage-pully.html)
Harvesting agricultural crops is typically on relatively flat and obstacle free ground, which is a clear advantage for automation. Forest environments are often characterised by complex paths, with logging residues on the ground surface and highly variable terrain characteristics along the extraction path (»skid-trail«). The task of moving logs from the harvesting site to the roadside requires real-time information of the machine position, the ability to identify and pick up logs, the coordinates for loading in the forest and unloading at the landing, and detection and avoidance of obstacles. A group of researchers in Sweden have developed and tested the path tracking capability of an autonomous forwarder in the forest (Ringdahl et al. 2011). Using a laser scanner, the machine can identify the forest road and/or skid trail. The next step in autonomous forwarder development is for detection of logs on the ground for pick-up.
An alternative to integrating the path detection onto the forwarder itself is the use of aerial drones. UAVs that are capable of navigating around obstacles in complex environments have been developed that, by deep learning algorithms, navigate through forest trails and trees. A drone called the »pushbroom stereo« developed by researchers from MIT’s Computer Science and Artificial Intelligence Lab (CSAIL) is capable of flying at 50 km/h and is able to avoid tree obstacles by means of an obstacle-detection system. The software developed by the researchers allows the drone to detect objects and build a full map of its surroundings in real-time. A group of Swiss researchers from the University of Zurich and NCCR Robotics have also developed the technology that allows a quadcopter drone to autonomously navigate a previously-unseen forest trail using the images from its single colour cameras (Giusti et al. 2015). While only in a testing phase, this is an important technological development that can be deployed in autonomous forest machines to efficiently navigate the complex forest terrain.
To help develop the concept of an autonomous forwarder, a group of University of Canterbury students designed a scale prototype (Hartley et al. 2018). It uses GPS for guidance and Leddar (solid state LiDAR) for obstacle detection (Fig. 9). It has no intelligence in terms of obstacle avoidance and relies on an operator taking control of the machine remotely, using the forward facing video camera, to circumvent the obstacle before it is allowed to continue autonomously to its destination. The steering mechanism has been simplified to a basic skid steer, and without the need for an operating cab, it highlights the potential to greatly simplify equipment design. This then provides the option of running multiple smaller units to ferry materials between the felling and processing areas, ensuring a more consistent supply of wood. The cost of down-time would also become negligible, as there is neither an operator or high operating cost.

Fig. 9 UC autonomous forwarder prototype
Processing: The »landing« (processing area) is a complex work environment. Nearly all harvesting operations extract timber from the cutover (in-forest) to a designated processing and/or storage area for subsequent transportation. Two primary reasons are:
Þ in-forest extraction systems are not suited to higher speed larger load for on-road transportation, and conversely our on-road trucks are not suited to in-forest condition
Þ multiple products (log sorts) are being derived from trees that typically require sorting and stacking, and for tree length extraction systems processing into logs in the first place.
A landing is a defined and relatively small work space. Many of the activities are relatively simplistic in terms of mechanics (unloading, stacking, and loading), or simple in terms of task (processing, sorting). A typical NZ logging operation will convert the extracted stems into over 15 different log grades. While companies justify the approach with regard to maximising the value recovery, it is costly, and constrains the operation. A robotic landing operation is illustrated below (Fig. 10) and encompases robotic elements of scanning and sorting along a conveyer belt, as well as automated truck loading. The digital stereovision system developed by Costa et al. (2018) that is able to acquire dendrometry parameters and georeference stereo images could find a useful application in autonomous log sorting facilities.

Fig. 10 Vision for a robotic landing system to be developed in the 2018-2025 FGR programme (Image provided by Raymond/FGR)
FPInnovations’ Transport and Energy group initiated a project in 2016 to evaluate possible applications of autonomous vehicles in mill yards (FPSolutions 2016). A proposed configuration for the project could be an autonomous vehicle remotely-operated and equipped with proximity detection and alert technology (PDAT) systems, and anti-collision and anti-roll systems performing monotonous task of mill yard transportation. The goal is to optimise mill yard logistics and improve productivity, reduce labour costs, and increase worker safety. For systems dealing with multiple tree species, the University of Laval is working on a computer vision species identification system based on the bark of the tree (Carpentier 2018).
Cut-to-length (CTL) system lends itself more readily to robotic unloading, sorting and loading onto trucks. The movement of logs to storage areas is likely to be a longer term project given the complexity of stacking logs. Tree-length systems, where the stems are brought to the landing, lends itself to some level of automation in terms of quality assessment, including scanning and processing, and subsequent sorting. The design of a readily movable rig to support such operations will be the main challenge.
Transportation: Autonomous trucks for public highways are being extensively developed. Given that forestry trucks do not often need to operate in urban environments, and move between relatively fixed destination of forest to mill (and/or port), their introduction is likely to arrive sooner than for other industries. If logs are to be moved longer distances using trucks on private, or restricted roads, this will facilitate earlier implementation. Some specific benefits of moving multiple trucks are highlighted.
Road transportation of harvested logs is often identified as an aspect of forest operations for improved productivity in the wood supply chain. Developments in the driverless truck technology is growing and rapidly changing with the benefit that autonomous trucking reduces labour requirements and hence costs. Intelligent haulage trucks, remotely connected and real-time monitored, are now in use in different industries requiring long haulage of products (https://www.scania.com/group/en/autonomous-transport-solutions/). Although the use of intelligent trucks is expected to revolutionise forest product transportation, its use is yet to materialise in the industry. The primary issue for implementation of autonomous trucks is more of a social consideration of driverless vehicles sharing public roads with commuters. While the primary concern is often linked to safety, the greater issue is simply the fear of sharing the road with a robotic vehicle.
For truck movement off-public highways, autonomous vehicles have already been developed and deployed in mining operations. As such, the extension to the forest industry should be realistic. There are many manufacturers that have developed off-road industrial transportation systems including Caterpillar, Hitachi and Komatsu. These trucks are equipped with high level navigation and guidance, and obstacle detection systems enabling them to move seamlessly from one point to another in a repetitive manner to accomplish the task of moving materials.
The concept of platooning may provide an opportunity for increased efficiency without public fear of sharing the road with a large robotic vehicle. »Platooning« involves a driven truck being followed by »slave« truck(s) that follow the exact path of the driven truck (Fig. 11). The platoon of trucks is synchronised and share positional and driving information from the lead truck. As such platoon trucks are only semi-autonomous and require a human driver to take over when the connection is disengaged. Another advantage of slave trucks is that they can travel closer to each other than would be possible with human drivers. This in turn offers advantages including improved safety and increased fuel efficiencies, but will also create new issues such as other traffic overtaking a platoon. This technology is already in its developmental stages in Singapore by Scania Group and Toyota with the goal of transporting containers from one port terminal to another with fully automated docking and undocking of cargos (Scania 2017).
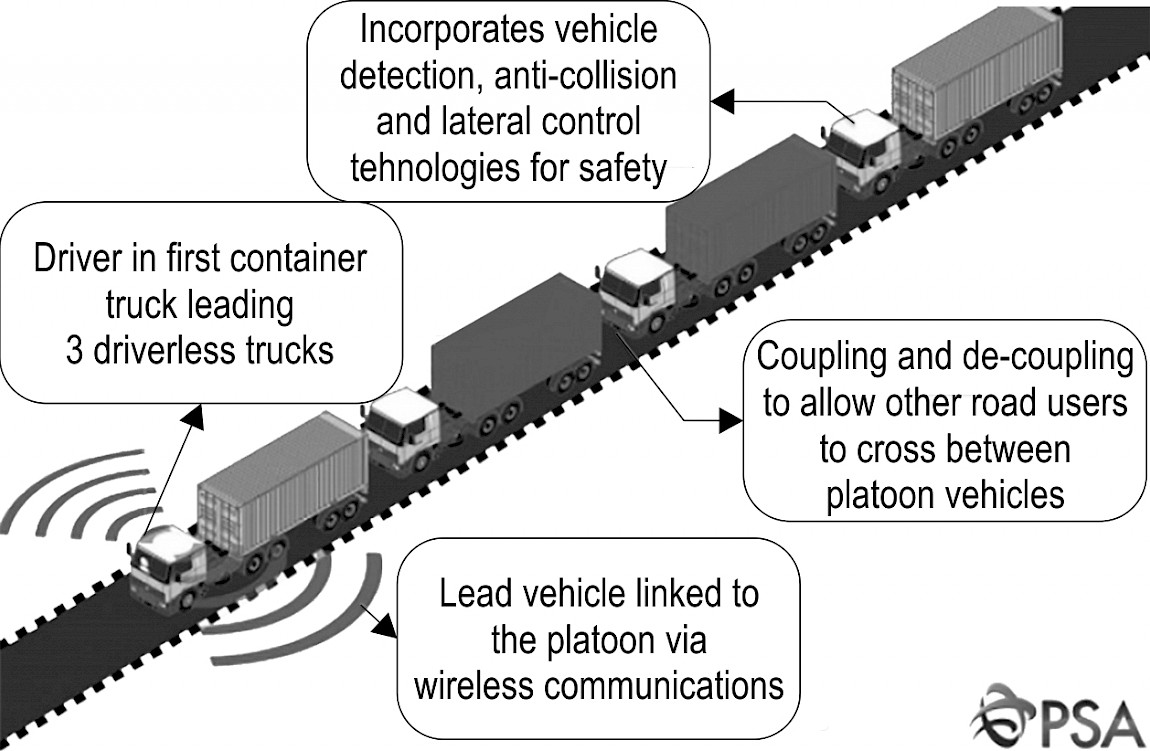
Fig. 11 Concept of platooning with sensors simply keeping the following (slave) trucks at a specific distance (Source: https://www.globalpsa.com/psa-to-start-truck-platooning-trials-in-singapore/)
4. Conclusions
The hardware and technology are used to make almost any aspect of forest operations autonomous. However, for forest operations that are complex and require visual inputs for decision making, software requirements will restrict their implementation. While there is a plethora of ideas, there are no fully autonomous systems currently working in timber harvesting. The extraction and subsequent transportation of stems/logs with GPS-guided systems have been identified as the most likely to be the first robotic operations that can be achieved with modest R&D investment in the near future. This will be aided by current low-cost ability to map terrain using LiDAR and/or video using mobile (ground or aerial) platforms. Significant additional gains, especially in terms of creating markets for larger numbers of machines, will be with purpose-built cabless machines. With improved visual recognition software, partial automation will benefit elements such as stem processing, or more complex machine movements such as grappling a stem. In the longer term, and with a more substantial R&D investment, felling in a plantation environment may also become economically feasible.
Acknowledgments
The orginal work was supported by the Forest Wood Products Australia. This publicaiton is largely based on work entitled »Next Generation Timber Harvesting Systems: Opportunities for remote controlled and autonomous machinery«. Published as Project number: PRC437-1718 January 2018.
5. References
Acemoglu, D., Restrepo, P., 2017: Robots and jobs: evidence from US labor markets. MIT Department of Economics Working Paper No. 17-04. Available online: https://ssrn.com/abstract=2940245 (accessed 17 March 2017)
Ackerman, E., 2014: No tree is safe from this chainsaw-wielding Robot. IEEE Spectrum. Available online: https://spectrum.ieee.org/automaton/robotics/industrial-robots/no-tree-is-safe-from-this-chainsaw-wielding-robot (accessed 13 July 2019)
Bergkvist, I., Norden, B., Lundstrom, H., 2007: The Beast, a Remote Controlled Harvester. In Sustainable Forest Operations – The Future is Now! 3rd Forest Engineering Conference, Council on Forest Engineering 30th Annual Meeting, Mont-Tremblant, Quebec, Canada.
Burns, C., 2010: Robots save earth. Yanko design. Available online: https://www.yankodesign.com/2010/08/19/robots-save-earth/ (accessed 14 July 2019)
Carpentier, M., Giguere P., Gaudreault J., 2018. Tree Species Identification from Bark Images Using Convolutional Neural Networks in 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems. Availalble online: https://arxiv.org/pdf/1803.00949.pdf https://doi.org/10.1109/IROS.2018.8593514
Costa, C., Figorilli, S., Proto, A.R., Colle, G., Sperandio, G., Gallo, P., Antonucci, F., Pallottino,F., Menesatti, P., 2018: Digital stereovision system for dendrometry, georeferencing and data management. Biosystems Engineering 174: 126-133. https://doi.org/10.1016/j.biosystemseng.2018.07.003
Christensen, H.I., 2016: A Roadmap for US robotics from internet to robotics. 2016 Edition. University of California, San Diego, USA. Availalble online: http://jacobsschool.ucsd.edu/contextualrobotics/docs/rm3-final-rs.pdf (accessed 13 May 2017)
Chudy, R., 2016: The death of the forest Beast. Forest Monitor. Available online: http://www.forest-monitor.com/en/death-forest-beast/ (13 July 2019)
Courteau, J. 1989. Robotics in forest harvesting machines. FERIC, Pointe Claire Quebec Canada.
Dorfman, J., 2009: Agricultural robots: fields of automation. Technology Quarterly: The Economists. Available online: https://www.economist.com/technology-quarterly/2009/12/12/fields-of-automation (accessed 9 July 2019)
Englund, W., Mörk, A., Andersson, H., Manne, J., 2017: Semi-automated forwarder crane – development and evaluation in a simulator. Work Report Nr. 932–2017, Skogforsk, Sweden.
FPSolutions, 2016: Autonomous vehicles: exploring new opportunities for mill yards. Forest Operations – FPInnovations. Available online: https://fpinnovations.ca/MediaCentre/Newsletters/FPSolutions/2016/12-December/FO_other_autonomous_en.html (accessed 13 July 2018)
Giusti, A., Guzzi, J., Cireşan, D.C., He, F.L., Rodríguez, J.P., Fontana, F., Faessler, M., Forster, C., Schmidhuber, J., Di Caro, G., Scaramuzza, D., Gambardella, L.M., 2015: A Machine Learning Approach to Visual Perception of Forest Trails for Mobile Robots. IEEE Robotics and Automation Letters 1(2): 661–667. https://doi.org/10.1109/LRA.2015.2509024
Guimier, D.Y., 1998: Canadian Perspective on Mechanized Harvesting Development. In Mechanized harvesting: The future is here. Conference proceedings, Department of Forest Engineering, Oregon State University, Corvallis, USA.
Hartley, A., Harvey, G., Treanor, J., May, B., 2018: Autonomous Forestry Extraction Machines. Final Year Project Report M39. Mechanical Engineering, University of Canterbury, New Zealand.
Heinimann, H.R., 1999: Ground-based Harvesting Systems for Steep Slopes. In Proceedings of the International Mountain Logging and 10th Pacific Northwest Skyline Symposium, Corvallis OR, March 28 – April 1, J. Sessions and W. Chung Eds., 1–19 p.
Hellström, T., Lärkeryd, P., Nordfjell, T., Ringdahl, O., 2009: Autonomous forest vehicles: historic, envisioned, and state-of-the-art. Int. J. of Forest Engineering 20(1): 31–38. https://doi.org/10.1080/14942119.2009.10702573
Lindroos, O., La Hera, P., Häggström, C., 2017: Drivers of Advances in Mechanized Timber Harvesting – a Selective Review of Technological Innovation. Croatian J .For. Eng. 38(2): 243–258.
Löfgren, B., 2006: Automation of Forestry Machines – an Important Piece in Precision Forestry. In Precision Forestry in plantations, Semi-natural and Natural Forests, Proceedings of the International Precision Forestry Symposium, Stellenbosch University, South Africa.
McEwan, A., 2017: Forecasting the Technology Drivers of Harvesting Systems for Fast Growing Eucalyptus and Acacia Plantation Forestry. PhD thesis, University of Florence, Italy. https://doi.org/10.3390/f10090724
Murphy, R.R., 2000: Introduction to AI Robotics. MIT Press, USA. https://doi.org/10.1609/aimag.v21i1.1497
Nicholls, A., Bren, L., Humphreys, N., 2004: Harvester productivity and operator fatigue: working extended. Int. J. For. Eng. 15(2): 57–65. https://doi.org/10.1080/14942119.2004.10702497
Olivera, A., Visser, R., 2016: Using the harvester on-board computer capability to move towards precision forestry. NZ Journal of Forestry 60(4): 3–7.
Parker, R., Bayne, K., Clinton, P., 2016: Robotics in forestry. NZ Journal of Forestry 60(4): 8–14.
Parker, R., Meaclem, C., Gutschmidt, S., Chen, X., 2015: Teleoperation and Robotics for Forestry. Paper presented at Robotics in the Forest Workshop, April 21–23, Hyatt Regency Montreal.
Ringdahl, O., 2011: Automation in Forestry – Development of Unmanned Forwarders. PhD Thesis. Department of Computing Science. Umeå University, Sweden
Ringdahl, O., Lindroos, O., Hellström, T., Bergström, D., Athanassiadis, D., Nordfjell, T., 2011: Path tracking in forest terrain by an autonomous forwarder. Scandinavian J. of Forest Research 26(4): 350–359. https://doi.org/10.1080/02827581.2011.566889
Scania, 2017: Gearing up for platooning. Available online: https://www.scania.com/group/en/gearing-up-for-platooning/ (accessed 1 July 2019)
Todd, D., 2015: Robots are coming to work. Is a guaranteed income far behind? Vancouver Sun, Vancouver, Canada. Available online: https://vancouversun.com/news/staff-blogs/robots-are-coming-to-work-is-a-guaranteed-income-far-behind (accessed 14 July 2019)
Ushiyama, T., 2017: Drones, IT and 3-D images help manage forests more efficiently. Nikkei Asian Review. Available online: https://asia.nikkei.com/Business/Companies/Smart-forestry-lets-Komatsu-chop-wood-10-times-faster# (accessed 9 July 2019)
Westerberg, S., Shiriaev, A., 2013: Virtual environment-based teleoperation of forestry machines: designing future interaction methods. Journal of Human-Robot Interaction 2(3): 84–110. https://doi.org/10.5898/JHRI.2.3.Westerberg
Zhang, J.B., Santagate, J., Mukherjee, V., Ortis, I., Parker, R., Holmes, C., Florean, A., 2016: IDC FutureScape: Worldwide robotics 2017 predictions. IDC FutureScape – Doc # US41118517.
© 2020 by the authors. Submitted for possible open access publication under the
terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Authors’ addresses:
Prof. Rien Visser, PhD *
e-mail: rien.visser@canterbury.ac.nz
University of Canterbury
New Zealand School of Forestry
Christchurch
NEW ZEALAND
Okey Francis Obi, PhD
e-mail: francis.obi@unn.edu.ng
University of Nigeria
Faculty of Engineering
Agricultural and Bioresources Engineering Department
41001, Nsukka
Enugu state
NIGERIA
* Corresponding author
Received: August 22, 2019
Accepted: March 16, 2020
Subject review